Возможности, визуализация и графические средства
Генераторный режим с отдачей энергии в сеть
Асинхронные двигатели с улучшенными пусковыми свойствами
Реакторный и автотрансформаторный пуск АД
Регулирование скорости изменением числа пар полюсов
МАТЕМАТИЧЕСКИЕ МОДЕЛИ АСИНХРОННОЙ МАШИНЫ
Математическая модель асинхронной машины в осях, вращающихся с произвольной скоростью
Преобразование уравнений асинхронной машины в неподвижной системе координат
Структурная схема модели в неподвижной системе координат и её поблочное описание
Результаты моделирования
Результаты моделирования
Объект исследования
Снятие динамической характеристики при параметрах короткого замыкания
Снятие искусственных механических характеристик
Снятие естественной механической характеристики
Определение затрат времени на разработку (ПМО) по стадиям проектирования
Расчет затрат на требующееся машинное время
Технические методы увеличения безопасности работы за компьютером
Навигация
Объект исследования
Разработка виртуальной лабораторной работы на базе виртуальной асинхронной машины в среде MATLAB
114601
знак
5
таблиц
73
изображения
6.3 Объект исследования
В лабораторной работе исследуются асинхронные двигатели серии 4А с исполнением по степени защиты IP 44 для АД с короткозамкнутым ротором и с исполнением IP 23 для АД с фазным ротором. Паспортные данные, этих двигателей приведены в таблицах П1-П2 и П4-П5:
- номинальная выходная мощность Р2н,
- номинальный коэффициент полезного действия ηн,
- номинальный коэффициент мощности статорной обмотки сosφн,
- момент инерции на валу машины J кг×м2,
- номинальный электромагнитный момент Мн,
- кратность пускового момента Мп / Мн,
- кратность максимального момента Мк / Мн,
- кратность пускового тока I1п / I1н,
- критическое скольжение ротора Sk= 25 %,
- номинальное скольжение ротора Sн= 3.6 %.
- параметры Г-образной схемы замещения (рисунок 4.3) в относительных единицах:
в номинальном режиме:
- активное и реактивное сопротивления R`1*, X`1*,
- активное и реактивное сопротивления R``2*, X``2*,
- реактивное сопротивление взаимоиндукции Xm*,
в режиме короткого замыкания:
- активное и реактивное сопротивления R``2*кз, X``2*.
В таблицах П3 и П6 приведены значения величин, необходимых для моделирования и рассчитаны по данным таблиц П1-П2 и П4-П5:
- добавочное сопротивление R2 доб,
- потери в стали Pst,
- коэффициент трения Ftr,
в номинальном режиме:
- активное сопротивление и индуктивность рассеяния фазы статора Rs, Ls,
- активное сопротивление и индуктивность рассеяния фазы ротора R`r, L`r,
- индуктивность взаимоиндукции Lm,
в режиме короткого замыкания:
- активное сопротивление и индуктивность рассеяния фазы ротора R`r кз, L`r кз,
6.4 Исследование АД с короткозамкнутым ротором
Описание принципа действия, устройства, способов пуска и регулирования скорости приведено в разделе 2.
6.4.1 Ознакомление со схемой лабораторной работы
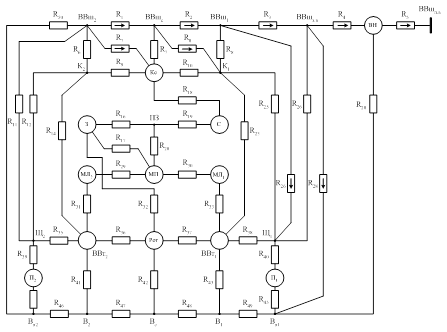
Для выбора схемы необходимо в окне MATLAB (рисунок 6.1) выбрать в качестве текущего каталога папку, в которой находится файл со схемой асинхронного двигателя с короткозамкнутым ротором: «C:\MATLAB6p5\work\AD\AKZ\AKZ.mdl». На экране появится схема модели лабораторной работы для исследования асинхронного двигателя с короткозамкнутым ротором, представленная на рисунке 6.2.
Основными блоками схемы являются: источник трёхфазного напряжения (Source), трёхфазный измеритель напряжения и тока (Three-Phase V-I Measurement), трёхфазный асинхронный двигатель с короткозамкнутым ротором (AD), задатчик нагрузки (М2 или α•М2), измеритель (вывод) скорости и электромагнитного момента на валу (wm, Te).
Дополнительные блоки: переключатели (Klych и K_Z), управляемый ключ (Switch), машинное время (Clock), осциллограф (XY), шинный формирователь (Mux), цифровые и графические дисплеи («n, M»; «P2, P1, I1, S, KPD, Cos.f»; «n, M, I1»), рабочие характеристики, блок «U1. I1. P1», усилитель «-К-».
Блоки программ: «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик».
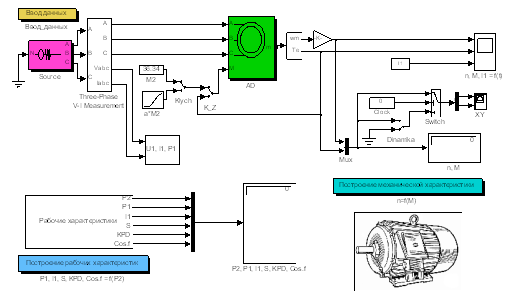
Рисунок 6.2 - Схема модели лабораторной работы для исследования асинхронного двигателя с короткозамкнутым ротором
6.4.2 Ввод данных в модель
Данные исследуемого двигателя для своего варианта (таблицы П1 и П3) необходимо ввести в модель, для этого необходимо дважды щёлкнуть левой кнопкой мыши по блоку асинхронной машины AD и в открывшемся окне ввести данные двигателя (рисунок 5.4). В качестве примера использован двигатель 4А112М4У3.
6.4.3 Определение пускового момента и тока при коротком замыкании
Опыт короткого замыкания асинхронного двигателя с короткозамкнутым ротором соответствует питанию обмотки статора при заторможенном роторе. Опыт проводится с целью определения пускового момента и пускового тока [4].
Для проведения опыта необходимо открыть блок AD и изменить параметры Rotor [Rr'(ohm) Llr'(H)] на соответствующие параметры ротора при коротком замыкании R`2 кз и L`r кз для заданного варианта, а также переключить блок K_Z (рисунок 5.7) в нижнее положение щёлкнув на нём дважды левой кнопкой мыши. Это приведёт к переключению на схему, когда электромагнитный момент подаётся на вход М2. В этом случае ω=0 и получается режим короткого замыкания.
Запустить систему на моделирование нажатием на кнопку ![]() и в установившемся режиме (когда показания блоков перестанут изменяться) остановить моделирование нажатием на кнопку
и в установившемся режиме (когда показания блоков перестанут изменяться) остановить моделирование нажатием на кнопку ![]() , записать пусковой момент Мп и пусковой ток I1п с цифровых дисплеев «P2, P1, I1, S, KPD, Cos.f» и «n, M». Определить кратность пускового тока
, записать пусковой момент Мп и пусковой ток I1п с цифровых дисплеев «P2, P1, I1, S, KPD, Cos.f» и «n, M». Определить кратность пускового тока ![]() и пускового момента
и пускового момента ![]() . Сравнить полученные значения с паспортными.
. Сравнить полученные значения с паспортными.
Похожие работы
... тепловой схемы выполнялось для стационарного режима, так как коэффициенты теплоотдачи в переходном и стационарном режимах одинаковы. Полученные результаты используются в компьютерной лабораторной работе «Моделирование нагрева асинхронного двигателя в различных режимах работы». Лабораторная работа выполнена в программной среде MatLab 6.1, и в ее приложении Simulink 4. Данная работа позволяет ...
0 комментариев