Возможности, визуализация и графические средства
Генераторный режим с отдачей энергии в сеть
Асинхронные двигатели с улучшенными пусковыми свойствами
Реакторный и автотрансформаторный пуск АД
Регулирование скорости изменением числа пар полюсов
МАТЕМАТИЧЕСКИЕ МОДЕЛИ АСИНХРОННОЙ МАШИНЫ
Математическая модель асинхронной машины в осях, вращающихся с произвольной скоростью
Преобразование уравнений асинхронной машины в неподвижной системе координат
Структурная схема модели в неподвижной системе координат и её поблочное описание
Результаты моделирования
Результаты моделирования
Объект исследования
Снятие динамической характеристики при параметрах короткого замыкания
Снятие искусственных механических характеристик
Снятие естественной механической характеристики
Определение затрат времени на разработку (ПМО) по стадиям проектирования
Расчет затрат на требующееся машинное время
Технические методы увеличения безопасности работы за компьютером
Навигация
Результаты моделирования
Разработка виртуальной лабораторной работы на базе виртуальной асинхронной машины в среде MATLAB
114601
знак
5
таблиц
73
изображения
4.5 Результаты моделирования
После запуска схемы модели на моделирование и завершения процедуры моделирования можно проанализировать полученные результаты.
Графический дисплей «wm, M=f(t)» отображает переходной процесс скорости и момента во времени.
При прямом пуске вначале наблюдаются значительные колебания момента и скорости. При приложении момента нагрузки, аналогично наблюдаются колебания момента и скорости, но менее значительные, чем при пуске, также видно, что при приложении момента нагрузки наблюдается уменьшение скорости.
Получив механическую характеристику, можно увидеть, что при пуске она получается динамической и на ней чётко виден колебательный процесс скорости и момента в виде концентрических окружностей с уменьшающимся радиусом по мере затухания колебаний скорости и момента. Аналогичная картина наблюдается при ступенчатом набросе нагрузки.
5. РАЗРАБОТКА ВИРТУАЛЬНОЙ ЛАБОРАТОРНОЙ РАБОТЫ НА БАЗЕ ВИРТУАЛЬНОЙ АСИНХРОННОЙ МАШИНЫ
Иную возможность анализа АД представляет специализированный раздел по электротехнике Toolbox Power System Block. В его библиотеке имеются блоки виртуальных электрических машин и АД с короткозамкнутым и фазным ротором в том числе.
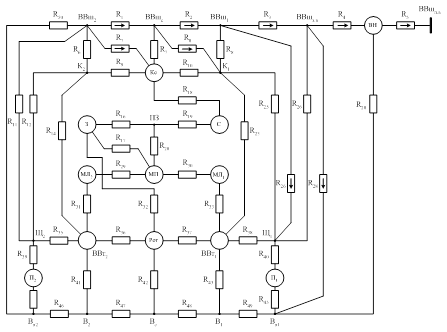
Схема виртуальной лабораторной работы для исследования двигателя с короткозамкнутым ротором представлена на рисунке 5.1.
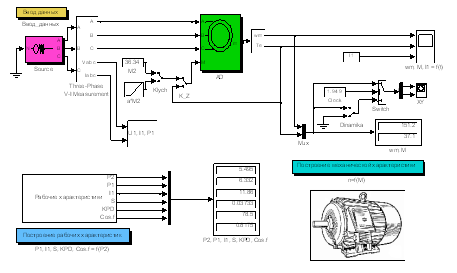
Рисунок 5.1 - Схема модели лабораторной работы для исследования асинхронного двигателя с короткозамкнутым ротором
5.1 Поблочное описание схемы
Основными блоками схемы являются: источник трёхфазного напряжения (Source), трёхфазный измеритель напряжения и тока (Three-Phase V-I Measurement), трёхфазный асинхронный двигатель с короткозамкнутым ротором (AD), задатчик нагрузки (М2 и α•М2), измеритель (вывод) скорости и электромагнитного момента на валу (wm, Te).
Дополнительные блоки: переключатели (Klych и K_Z), управляемый ключ (Switch), машинное время (Clock), осциллограф (XY), шинный формирователь (Mux), цифровые и графические дисплеи («wm, M, I1»; «P2, P1, I1, S, KPD, Cos.f»), «Рабочие характеристики», блок «U1. I1. P1».
Блоки программ: «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик».
Источник трёхфазного напряжения Source (рисунок 5.2) имитирует работу трёхфазного источника синусоидального напряжения с заземлённой нейтралью N и выходами фаз А, В и С.
Настраиваемыми параметрами являются:
Phase to ground peak voltage (V) – амплитуда фазного напряжения,
Phase angle of phase A (Degrees) – начальный фазовый угол фазы А,
Frequency (Hz) – частота напряжения,
Source resistance (Ohms), inductance (H) – сопротивление и индуктивность источника.

а) б)
Рисунок 5.2 - Блок Source: а) внешний вид, б) окно параметров
Трёхфазный измеритель напряжения и тока Three-Phase V-I Measurement (рисунок 5.3) измеряет трёх фазное мгновенное напряжение и ток, потребляемые нагрузкой от источника.
Настраиваемыми параметрами являются:
Voltage measurement: phase-to-ground – измерение фазного напряжения от фазы до земли,
Use a label – использовать ярлык (ссылку) вместо выхода,
In pu – система относительных единиц,
Current measurement: yes – подтверждение измерения тока.

а) б)
Рисунок 5.3 - Блок Three-Phase V-I Measurement: а) внешний вид, б) параметры
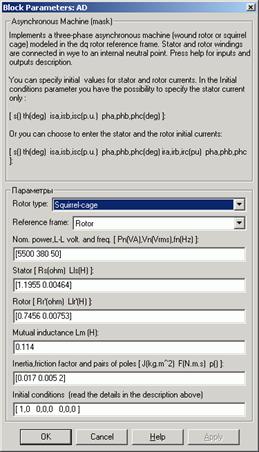
Трёхфазный асинхронный двигатель с короткозамкнутым ротором AD (рисунок 5.4) имитирует работу асинхронного двигателя с короткозамкнутым (или фазным) ротором. Составлен на основе математических уравнений.
Настраиваемыми параметрами являются:
Nom. power Pn – номинальная мощность,
Volt Vn – номинальное линейное напряжение,
Frequency fn – номинальная частота,
Stator (Rotor) R, L – активное сопротивление и индуктивность статора и приведённого ротора,
Mutual inductance Lm – взаимная индуктивность,
Inertia J – момент инерции на валу,
Friction factor F – коэффициент трения,
Pairs of poles – число пар полюсов р,
Initial conditions – начальные данные:
скольжение, угол поворота ротора, ток трёх фаз статора, сдвиг фаз А, В, С.
а) б)
Рисунок 5.4 - Блок AD: а) внешний вид, б) параметры
Задатчик нагрузки М2 (рисунок 4.12) и задатчик нагрузки α•М2 (рисунок 4.13). Описание этих блоков рассмотрено в разделе 4.
Машинное время Clock (рисунок 5.5) отображает время моделирования.
Настраиваемыми параметрами являются:
Display time – отображения времени в блоке,
Decimation – позволяет задать периодичность (через сколько дискретов времени) отображения значений времени.
а) б)
Рисунок 5.5 - Блок Clock: а) внешний вид, б) параметры
Измеритель (вывод) «wm, Te» (рисунок 5.6) выводит для отображения различные параметры асинхронной машины. Имеет возможность выбрать необходимые для вывода параметры из имеющихся. В данной схеме выводятся значения угловой скорости и электромагнитного момента на валу.
Настраиваемыми параметрами являются:
Machine type – тип машины,
Rotor currents [ira irb irc] – трёхфазный ток ротора,
Rotor currents [ir_q ir_d] – ток ротора в осях q, d,
Rotor fluxes [phir_q phir_d] – поток в роторе в осях q, d,
Rotor voltages [vr_q vr_d]- напряжение в роторе в осях q, d,
Stator currents [ia ib ic] – трёхфазный ток статора,
Stator currents [is_q is_d] - ток статора в осях q, d,
Stator fluxes [phis_q phis_d] – поток в статоре в осях q, d,
Stator voltages [vs_q vs_d] – напряжение в статоре в осях q, d,
Rotor speed [wm] – скорость вращения ротора
Electromagnetic torque [Te] – электромагнитный момент,
Rotor angle [thetam] – угол поворота ротора.

а) б)
Рисунок 5.6 - Блок «wm, Te»: а) внешний вид, б) параметры
Переключатели Klych, K_Z и Dinamika (рисунок 5.7) служат для переключения входного сигнала. Klych для переключения типа момента нагрузки на валу, K_Z для переключения на схему снятия пускового момента, а Dinamika для снятия динамической механической характеристики. Переключение происходит при двойном нажатии правой кнопкой мыши на блоке.
Настраиваемых параметров не имеет.
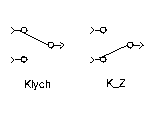
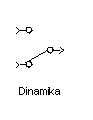
Рисунок 5.7 - Блоки Klych, K_Z и Dinamika
Управляемый ключ Switch (рисунок 5.8) служит для управляемого переключения входного сигнала. Имеет три входа, 1 и 3 - информационные, 2 - управляющий. Если величина управляющего сигнала не меньше некоторого ограничения, заданного в поле Threshold, то на выход подаётся сигнал с первого входа, в противном случае – сигнал с третьего входа. В схеме на первый вход подаётся вектор значений скорости и момента, также и на третий вход подаётся вектор скорости и момента при условии, что ключ Dinamika в верхнем положении, а на второй вход время.
Настраиваемыми параметрами являются:
Criteria for passing first input – критерий для прохождения сигнала с первого входа,
Threshold – порог переключения входа.

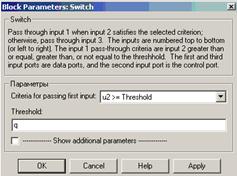
а) б)
Рисунок 5.8 - Блок Switch: а) внешний вид, б) параметры
Осциллограф XY (рисунок 4.18). Описание этого блока рассмотрено в разделе 4.
Шинный формирователь Mux (рисунок 4.16). Описание этого блока рассмотрено в разделе 4.
Графический дисплей «wm, M, I1=f(t)» (рисунок 4.15). Описание этого блока рассмотрено в разделе 4.
Цифровые дисплеи «wm, M», «P2, P1, I1, S, KPD, Cos.f» (рисунок 4.17). Описание этих блоков рассмотрено в разделе 4.
Блок «Рабочие характеристики» (рисунок 5.9) – это не стандартный блок, он разработан при создании данной виртуальной лабораторной работы. Внутри него реализуется расчёт рабочих характеристик по следующим формулам:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
к входной мощности добавляются потери в стали рсm1, так как в модели они не учитываются.
Настраиваемых параметров не имеет.
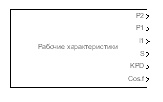
Рисунок 5.9 - Блок «Рабочие характеристики»
Блок «U1. I1. P1» (рисунок 5.10) также является не стандартным. В нём реализуется преобразование входных трёхфазных напряжений и токов в действующие значения, а также вычисление активной мощности.
Настраиваемых параметров не имеет.
Рисунок 5.10 - Блок «U1. I1. P1»
Блоки программ: «Ввод данных», «Построение механической характеристики» и «Построение рабочих характеристик» (рисунок 5.11) – являются ссылками на специально написанные M-программы, в которых реализуется ввод данных с помощью меню (рисунок 5.12) и графическое построение (рисунок 5.13) механической и рабочих характеристик.
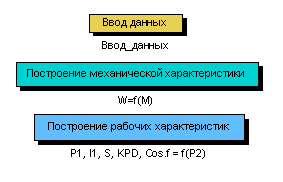
Рисунок 5.11 - Блоки программ
При открытии блока «Ввод данных», в котором реализована подпрограмма “Menu”, на экран выводится меню, в котором можно изменить параметры моделирования. Это является очень удобным элементом, так как ненужно перенастраивать саму модель и её блоки.
В меню ввода данных для модели:
время переходного процесса – это время необходимое для разгона двигателя до холостого хода при исчезновении колебаний момента и скорости,
время моделирования – время необходимое для выполнения одной процедуры моделирования,
амплитуда фазного напряжения – это номинальное значение U1н умноженное на ![]() ,
,
частота – частота питающего напряжения.
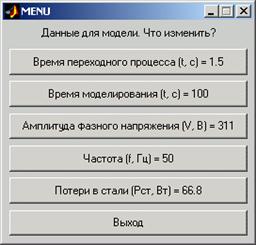
Рисунок 5.12 - Меню ввода данных
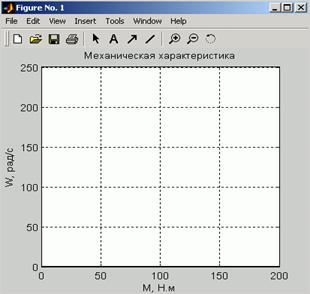
Рисунок 5.13 - Графическое окно для построения характеристик
Похожие работы
... тепловой схемы выполнялось для стационарного режима, так как коэффициенты теплоотдачи в переходном и стационарном режимах одинаковы. Полученные результаты используются в компьютерной лабораторной работе «Моделирование нагрева асинхронного двигателя в различных режимах работы». Лабораторная работа выполнена в программной среде MatLab 6.1, и в ее приложении Simulink 4. Данная работа позволяет ...
0 комментариев