Навигация
Фотоэлектрические устройства
37450
знаков
0
таблиц
9
изображений
4. Фотоэлектрические устройства
В настоящее время разработаны разные по конструкции и принципу действия фотоэлектрические устройства относительного ориентирования, обеспечивающие сборку различных по размеру и по форме деталей. Они характеризуются высокой надежностью и точностью.
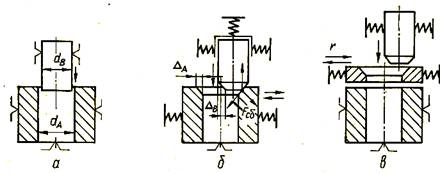
Простейшая принципиальная схема ориентирования изображена на рис. 2-7.а Согласно схеме, световое пятно от источника 1 фокусируется оптической системой 2 на поверхности детали (втулки) 3 и после отражения направляется системой 4 на фотоэлемент 5. При смещении детали влево (вдоль оси X) в некоторый момент времени прекращается поступление света на фотоэлемент. Это вызывает срабатывание исполнительного приводного органа, перемещающего базу (на рисунке не показана), на которой находится втулка.
Использование аналогичной схемы, при которой деталь перемещается вдоль оси У, позволяет расположить центр отверстия втулки в строго заданном положении. Схема конструкции такого устройства представлена на рис. 2.7,б. В этой конструкции источник света 1 с оптической системой 2, а также элемент 5 с системой 4 размещены на кронштейнах захватов 6, удерживающих вал 7. Устройство определяет положение сопрягаемого с валом отверстия втулки 3 и через систему промежуточных преобразователей и двигателей выводит вал в положение, при котором возможно соединение деталей. Фокусировка светового луча на торце втулки производится с помощью этого же устройства и основывается на экстремальном методе контроля.
5. Акустические устройства
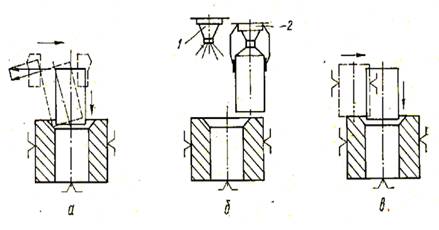
Определение относительного положения собираемых деталей с помощью акустических средств может осуществляться самыми разнообразными путями. В одном из таких устройств относительное положение деталей регистрируется и оценивается с помощью группы детекторов (микрофонов или акустических головок), включенных в систему управления положением деталей (рис. 2.8). На кронштейнах 3, прикрепленных к захвату 5, установлены на равных расстояниях от захвата микрофоны (акустические головки) 2 и 7, включенные в систему управления по дифференциальной схеме. Аналогичные микрофоны располагаются также в плоскости, перпендикулярной к плоскости чертежа и проходящей через ось захвата, в котором располагается валик 6. Привод 4 перемещает захват с валиком вниз по стрелке А, Он сообщает захвату осевые колебания с амплитудой 0,1 мм. В момент встречи валика с втулкой 1, например в точке О, возбуждается акустическая волна, которая при приведенном на рисунке относительном положении валика и втулки достигает головки 2 раньше, чем головки 7. Суммируемый в устройстве сравнения сигнал вырабатывает соответствующие команды, включающие исполнительные механизмы, устраняющие образовавшееся смещение.
Управляющий сигнал в устройстве сравнения определяется фазой сигналов в головках 2 и 7 и ее знаком. Аналогично действует система ориентирования и в направлении, перпендикулярном к рассмотренному. Причем исполнительные механизмы, устраняющие смещение, действуют до тех пор, пока сигнал в устройстве сравнения не станет равным нулю, что означает совмещение осей собираемых деталей поданной координате. Затем привод вертикальной подачи вводит валик в отверстие втулки.
Данное устройство может иметь в качестве чувствительных органов, опознающих смещение, пьезоэлектрические элементы, вмонтированные непосредственно в захват и расположенные накрест.
6. Инфракрасные устройства
Устройства такого типа характеризуются высокой чувствительностью и простотой реализации. Схема устройства с приемником инфракрасного излучения представлена на рис. 2.9. Сопрягаемая с валом 2 деталь 3 располагается на сборочной позиции над приемником инфракрасного излучения, а вал 2 - в захвате головки 1, управляемой исполнительными механизмами ИМ, которые обеспечивают движения по четырем координатам: трем линейным X, У и Z и одной угловой ![]() .
.
Тепловое излучение от торца вала через линзу 5 попадает на приемник излучения 6, который через усилитель 7 связан с оптимизатором (экстремизатором) 8, управляющим исполнительными механизмами ИМ.
Захваченный головкой вал при перемещении на сборочную позицию перемещается над нагревателем 4, который, посылая кратковременные тепловые импульсы, нагревает торец на 5- 10° выше температуры окружающей среды. Затем вал размещается над позицией сборки.
Тепловое излучение вала фиксируется приемником 6, причем величина этого излучения зависит от относительного положения вала и отверстия в детали 3. При наличии смещения сопрягаемых поверхностей выходной сигнал ниже, чем в ориентированном положении, т. е. характеристика регистрируемого приемником излучения имеет экстремальный характер.
Первоначально устройство ИМ![]() ориентирует вал относительно отверстия по углу поворота
ориентирует вал относительно отверстия по углу поворота ![]() , а после этого включаются приводы ИМХ, и ИМУ, ориентирующие вал по координатам X и У. Процесс ориентирования по каждой из координат прекращается в тот момент, когда экстремизатор зафиксирует максимальную за данный цикл интенсивность излучения от торца вала. По окончании ориентирования исполнительный механизм HMZ вводит вал в отверстие детали 3, и собранная сборочная единица удаляется. На этом цикл сборки заканчивается.
, а после этого включаются приводы ИМХ, и ИМУ, ориентирующие вал по координатам X и У. Процесс ориентирования по каждой из координат прекращается в тот момент, когда экстремизатор зафиксирует максимальную за данный цикл интенсивность излучения от торца вала. По окончании ориентирования исполнительный механизм HMZ вводит вал в отверстие детали 3, и собранная сборочная единица удаляется. На этом цикл сборки заканчивается.
Поскольку в систему введен экстремизатор, изменение температуры излучающего торца никак не сказывается на точности измерений. Следует отметить, что выпускаемые промышленностью радиометры, предназначенные для дистанционного измерения интенсивности светового излучения разных объектов, могут быть использованы для целей относительного ориентирования. В состав радиометров входят такие элементы, как приемник, оптическая система, фокусирующая излучение детали на чувствительную площадку приемника, электронная схема, служащая для преобразования, усиления и измерения сигнала с выхода приемника.
Рис. 2.6 - Пневматическое устройство относительного ориентирования
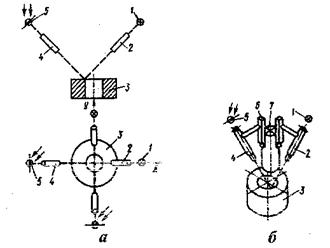
Рис. 2.7 - Ориентирование фотоэлектрическим методом: а – схема ориентирования; б – крепление ориентирующих органов к захвату
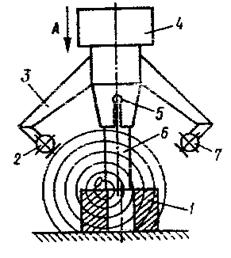
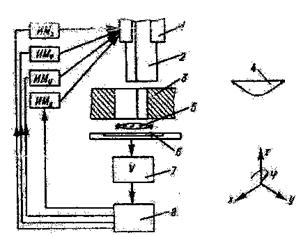
Рис. 2.8 - Схема акустического Рис. 2.9 - Схема инфракрасного
ориентирующего устройства устройства для ориентирования
Похожие работы
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...

... б – с нежестким базированием (для объектов с фасками); в – с ловителями Рисунок 3 – Схемы сборки с использованием адаптивных систем: а – с тактильной информацией; б – со зрительной информацией; в – с повторными попытками сопряжений 5. Пример робототехнической системы для многооперационной сборки Возможность выполнения сложной последовательности сборочных операций с помощью универсальных ...
... , перечислим регенерацию растворов в гальванических производствах; очистку хлор- и медьсодержащих сточных вод, очистку сточных вод в производстве аммиачной селитры. 5. Прогрессивные химико-технологические процессы В ряду прогрессивных химико-технологических процессов рассмотрим в первую очередь радиационно-химическую технологию и фотохимические процессы. За последние два десятилетия ...
... заготовок и станков с числовым программным управлением к выполнению технологических операций. Классификация и конструктивно технологические параметры ПР Классификация промышленных роботов: 1. По виду производства ПР делят на специальные, специализированные и универсальные. · Специальные ПР выполняют определенную технологическую операцию или вспомогательную модель ...
0 комментариев