Навигация
Адаптивные сборочные робототехнические комплексы (РТК)
37450
знаков
0
таблиц
9
изображений
Реферат Адаптивные сборочные РТК

1. ПР с адаптивным управлением
В том случае, когда требуется особо высокая точность взаимного положения собираемых элементов, сборочные ПР оснащают системами адаптивного управления. ПР с адаптивным управлением работает следующим образом: сначала производятся грубые и быстрые перемещения рук ПР по заданной программе, а затем точные перемещения соединяемых деталей с использованием обратной связи. При применении ПР с адаптивным управлением необходимость в строгом предварительном ориентировании деталей в значительной степени снижается. Такие ПР обеспечивают значительное повышение точности позиционирования устанавливаемых деталей, поскольку они могут получить информацию об окружающей их обстановке, переработать ее в блоке управления и соответственно отреагировать.
При этом используются различные устройства взаимного ориентирования, когда управление ПР осуществляется датчиками на основе полученной ими информации о силах и моментах, действующих в процессе соединения деталей.
В настоящее время широкое применение нашли устройства, в которых метод статического воздействия основан на показаниях датчиков, например тензодатчиков, индуктивных и др. Работа этих устройств в определенной мере напоминает сборку вручную ощупыванием, когда сенсорные элементы пальцев определяют величину и направление реакции, возникающей при сопряжении, вследствие чего появляется возможность устранить смещение и провести сборку. Такие ориентирующие устройства получили название ощупывающие.
Хорошо зарекомендовали себя также пневматические и фотоэлектрические устройства взаимного ориентирования. Разрабатываются и внедряются в производство телевизионные ориентирующие устройства, голографические, экстремальные.
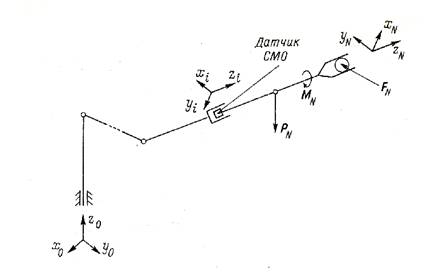
2. Ориентирование ощупываниемОдно из устройств такого принципа действия было разработано фирмой Hitachi (Япония). Устройство входит составной частью в сборочный манипулятор типа HI-T-HAND. При введении сопрягаемых деталей в контакт по торцам может возникнуть перекос вала, направленный в сторону отверстия. Чувствительные элементы, обычно тензодатчики, регистрируют этот перекос, выдавая на исполнительные механизмы сигналы на корректировку положения вала.
В подобных устройствах в качестве датчиков очувствления (датчиков обратной связи) можно использовать различные преобразователи. Например, пневматические струйные преобразователи, преобразователи типа сопло-заслонка. В последних модификациях манипуляторов в процессе ориентирования перемещаются обе сопрягаемые детали, что делает систему ориентирования более гибкой.
Определить возникшее угловое смещение можно также с помощью индуктивных преобразователей. Принцип действия их заключается в том, что одновременно измеряются два выходных параметра при перемещениях подвижной части преобразователя в двух направлениях. Этот преобразователь состоит фактически из двух перпендикулярно расположенных друг к другу индукционных преобразователей, имеющих один общий якорь. Якорь подвешен в центре шаровой оперы и имеет две степени свободы.
Для опознавания смещения деталей можно использовать также электроконтактные преобразователи.
3. Пневматические устройстваНа рис. 2.6 показана конструкция устройства относительного ориентирования. Деталь 6 подводится снизу под захват, укрепленный с помощью плоских пластинчатых пружин 19 и 24 к мембранным приводам 22 и 14. Сверху на колонне 16 размещена консоль 1, несущая толкатель 2. Толкатель выводит валик 4 из лотка 3 и вводит его в захват между губками 7 и 5. Губки поворачиваются друг относительно друга на оси 8 и сжимаются пружиной 9.
Если валик 4, перемещаясь вниз, не попадает в отверстие детали 6, а упирается в ее торец, то толкатель 2 смещается относительно консоли вверх и открывает золотник (на рисунке не показан), который открывает подачу сжатого воздуха в распределитель 17. Последний связан с воздушной магистралью посредством штуцера 18.
Из верхней полости распределителя воздух поступает через входные сопла 29 в отсеки 23, а затем в полости мембранных приводов 22 и 14 по шлангам. Кроме того, из отсеков 23 воздух поступает о выходные отверстия 25-28, выполненные в губках 5 и 7. Соединения выполнены так, что выходные отверстия 26 и 28 связаны шлангами с полостями привода 14, а отверстия 25 и 27 - с полостями привода 22.
В зависимости от расположения валика 4 поступление воздуха через отверстия 25-28 будет различным и, следовательно, силы, действующие на мембраны приводов 14 и 22, также будут различными. Штоки 21 этих приводов, перемещаясь в результате разности давлении в их полостях, подводят валик к отверстию.
После центрирования валик под действием толкателя 2 входит в отверстие. Собранные детали отводятся после сборки вниз или вправо, губки раскрываются, пропуская валик. При отводе собранных деталей вниз толкатель остается в крайнем нижнем положении, не давая валику выйти из отверстия. Когда детали удалены, консоль с толкателем уходят вверх, воздух из приводов стравливается. На место валика 4 по лотку 3 выходит новый валик, а на место детали 6 подается другая деталь. Цикл повторяется.
Данное устройство может первоначально устанавливать захват по центру отверстия. После этого толкатель вводит в захват валик, который сразу попадает в сопрягаемое отверстие. Если сборка по какой-либо причине не произошла, толкатель останавливается, сжав предохранительную пружину, расположенную в консоли. Переналадка устройства состоит в смене губок.
Похожие работы
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...
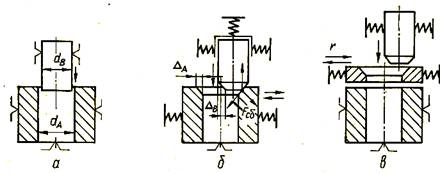
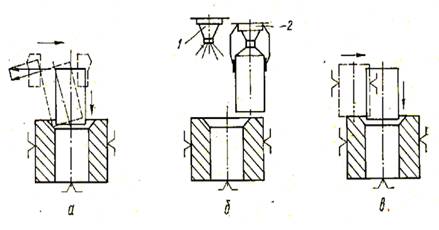
... б – с нежестким базированием (для объектов с фасками); в – с ловителями Рисунок 3 – Схемы сборки с использованием адаптивных систем: а – с тактильной информацией; б – со зрительной информацией; в – с повторными попытками сопряжений 5. Пример робототехнической системы для многооперационной сборки Возможность выполнения сложной последовательности сборочных операций с помощью универсальных ...
... , перечислим регенерацию растворов в гальванических производствах; очистку хлор- и медьсодержащих сточных вод, очистку сточных вод в производстве аммиачной селитры. 5. Прогрессивные химико-технологические процессы В ряду прогрессивных химико-технологических процессов рассмотрим в первую очередь радиационно-химическую технологию и фотохимические процессы. За последние два десятилетия ...
... заготовок и станков с числовым программным управлением к выполнению технологических операций. Классификация и конструктивно технологические параметры ПР Классификация промышленных роботов: 1. По виду производства ПР делят на специальные, специализированные и универсальные. · Специальные ПР выполняют определенную технологическую операцию или вспомогательную модель ...
0 комментариев