Навигация
Основные особенности робототехнических систем
27556
знаков
0
таблиц
4
изображения
Основные особенности робототехнических систем

1. Основные определения, структура и классификация ПР
Для воспроизведения двигательных функций человека в процессе трудовой деятельности созданы манипуляторы – многозвенные механизмы с управляемыми приводами на каждом звене. Манипуляторы разделяются на биотехнические и автоматические. Биотехнические манипуляторы управляются оператором дистанционного или непосредственно в результате перемещения рабочего органа манипулятора.
В автоматических манипуляторах рабочие функции выполняются без участия человека.
Промышленный робот – это автоматический манипулятор промышленного применения, имеющий систему программного управления, обеспечивающую быструю переналадку для выполнения задач, различающихся последовательностью и характером манипуляционных действий.
В роботизированных технологических комплексах ПР выполняют функции восприятия внешней среды, принятия решений и выполнения манипуляционных действий.
Манипуляторы ПР характеризуются грузоподъемностью, объемом рабочей зоны, числом звеньев, погрешностью позиционирования, системой координат, конструктивной и компоновочной схемой, типом системы управления.
Первые промышленные роботы появились в США сравнительно недавно, в 1962 г. Это были роботы типов "Версатран", "Юнимейт", "Универсал", "Циклон", оснащенные устройствами ЧПУ позиционного типа. Первые ПР были манипуляционными и использовались для обслуживания прессов, штампов, нагревательных печей и другого технологического оборудования в цехах с вредными условиями труда. Наибольшее распространение получили манипуляционные роботы грузоподъемностью до 20 кг с цыкловым двухпозиционным управлением.
Планирование обработки информации действий манипуляционного робота – один из важнейших путей, который повышает эффективность работы всей системы управления манипуляционного робота. Оно включает определение последовательности этапов с преобразованием модели внешней среды робота, обеспечение мультипроцессорного режима обработки данных, планирование последовательности опроса систем очувствления как перед началом выполнения роботом технологических операций, так и в ходе ее выполнения с указанием приоритета каждой из операций.
Большие функциональные возможности обеспечивает микропроцессорное устройство числового программного управления (УЧПУ) "Сфера-36". Его структура содержит центральный процессор (ЦП) и модули микропроцессоров управления приводами (МПП). В состав МПП входят репрограммируемая постоянная память (РПЗУ). Модуль связи (МС) служит для обмена данными между системной магистралью (СМГ) центрального процессора и СМГ модулей микропроцессоров приводов. Обмен осуществляется в режиме прямого доступа к памяти (ПДП).
С центральным процессором через СМГ связаны запоминающее устройство (ЗУ), модуль ввода аналоговых сигналов (МАВ), модуль ввода-вывода (МВВ) дискретных сигналов и устройство последовательного обмена (УПО). Код с выхода МПП подается на модуль управления приводом (МУП), который управляет широтно-импульсным регулятором напряжения.
В МУП формируется код перемещения с импульсного фотоэлектрического датчика положения ДП Абсолютные значения положения звена манипулятора получаем на выходе потенциометрического датчика ДП2. Программа пользования создается, редактируется, просматривается и запускается.
2. Кинематические схемы ПР
Манипулятор промышленного робота является многозвенным механизмом с последовательным соединением звеньев и разомкнутой кинематической цепью. Кинематическая схема манипулятора представляет собой соединение звеньев, определяющих основные движения схвата робота в рабочей зоне, и описывается в системе координат (СК), оси которой целесообразно совместить с направлениями основных перемещений схвата, так как это упрощает математическое описание движений манипулятора. Наиболее распространены пространственные манипуляторы, работающие в сферической, цилиндрической, декартовой или ангулярной системах координат. Гораздо реже используются плоские манипуляторы. Ангулярная система координат характеризуется тем, что перемещение объекта манипулирования обеспечивается согласованным взаимным поворотом звеньев ПР, имеющих постоянную длину. Эта система координат оказалась весьма удобной для производственных роботов. Роботы, использующие ангулярную СК, называются антропоморфными ПР. Они более компактны по сравнению с традиционными конструкциями манипуляторов, которые являются комбинацией вращательных и поступательных кинематических пар. Звенья манипулятора соединяются кинематическими парами пятого класса, т.е. каждое звено может иметь только одну степень подвижности относительно предыдущего звена, так что возможно либо вращательное, либо поступательное движение последующего звена относительно предыдущего.
Свойства и характеристики ПР в значительной степени определяются кинематической схемой, основная функция которой заключается в подводе схвата в заданную точку пространства с определенной ориентацией. Исходя из выполнения этой основной функции, зависящей в свою очередь от технологического процесса, должны выполняться кинематические схемы конкретных ПР. Кроме того, кинематические схемы ПР должны обеспечивать по возможности не зависимое управление всеми координатами, допускать при необходимости определенную маневренность, соответствовать типу применяемого привода и образовывать с ним органическое единство. На рисунке 1 изображена кинематическая схема манипулятора с датчиком системы силомоментного очувствления.
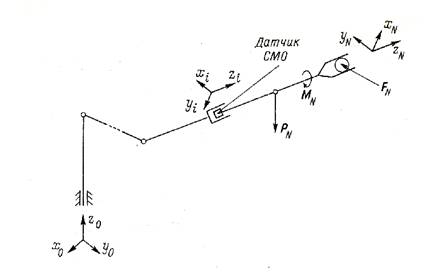
Рисунок 1 - Кинематический схема манипулятора с датчиком СМО
Кинематическая схема манипулятора зависит от требований технологического процесса и, в свою очередь, влияет на построение многомерной системы взаимосвязанных следящих приводов, определяет степень взаимного влияния звеньев манипулятора и объем информации, связанный с преобразованием координат при управлении ПР.
Напольные роботы с касающейся выдвижной рукой работают в сферической и цилиндрической СК. Универсальные роботы с этой конструктивной схемой работают в сферической системе координат. К роботам этой группы относится и первый промышленный робот "Юнимейт". Также, существуют промышленные роботы "Пума", предназначенные для выполнения быстрых сборочных операций в приборостроительной и электронной промышленности.
Похожие работы
... лакирование матовым лаком НЦ-243 на лакообливной машине и сушка в конвективной сушильной камере или на стеллажах. 2. Автоматизированные линии отделки. Компоновка РТК для нанесения лакокрасочных материалов На мебельных предприятиях для отделочных работ широко применяются конвейерные, полуавтоматические и автоматические линии. Они включают станки для нанесения материалов, установки для сушки и ...
... их исследований - моделирование социального поведения, общения, человеческих эмоций, творчества. 3.2 Итоги и проблемы Проблемы ИИ, связанные с ресурсами Сообщения об уникальных достижениях специалистов в области искусственного интеллекта (ИИ), суливших невиданные возможности, пропали со страниц научно-популярных изданий много лет назад. Эйфория, связанная с первыми практическими успехами в ...
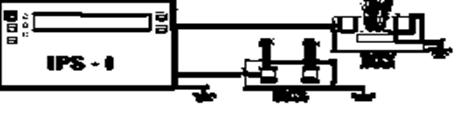
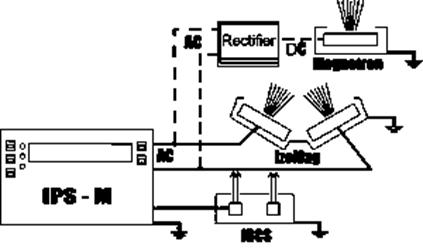
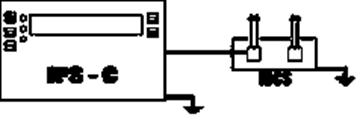
... технологий показана возможность создания гибких производственных робототехнических комплексов. Даны примеры типовой компоновки гибких технологических робототехнических комплексов для электрофизической обработки, включающих подготовительные технологические операции. Роботизированные установки для напыления тонкослойных покрытий на поверхность листового материала Установки представляют собой ...
... , , . Произведем оценку числа возможных вариантов, которые можно синтезировать на основе морфологической матрицы при наложении на нее граничных условий проектирования, а именно исключения вышеперечисленных вариантов: Для всего PC машины поточной линии прядильного производства оценка полных решений может быть проведена по следующей формуле: , где – количество исполнительных механизмов в ...
0 комментариев