Простейшие свойства решений системы (I)
Геометрическая интерпретация динамической системы на фазовой плоскости (х, у)
Разбиение области в фазовой плоскости на траектории
Направление на траектории. Изменение параметризации
Терминология и обозначения
Теорема о непрерывной зависимости от начальных значений
Замена переменных
Изоклины
Примеры
Навигация
Терминология и обозначения
Динамические системы в плоской области
75588
знаков
0
таблиц
20
изображений
8. Терминология и обозначения
В случае, когда решения, соответствующие данной траектории L, определены для всех значении t (![]() ), мы будем иногда, желая подчеркнуть это, называть такую траекторию L целой траекторией. В силу теоремы 2 всякая траектория, лежащая в ограниченйой части плоскости, у которой расстояние любой ее точки от границы области G больше некоторого
), мы будем иногда, желая подчеркнуть это, называть такую траекторию L целой траекторией. В силу теоремы 2 всякая траектория, лежащая в ограниченйой части плоскости, у которой расстояние любой ее точки от границы области G больше некоторого ![]() 0 > 0, заведомо является целой траекторией.
0 > 0, заведомо является целой траекторией.
Обратное неверно. Траектория, у которой есть точки, сколь угодно близкие к границе области G, может как быть, так и не быть целой траекторией.
Пусть М0 — точка траектории L, которая при выбранном решении соответствует значению t = t0. Если решение определено при всех t(t > t0), то множество точек траектории L, соответствующих значениям t > t0, называется положительной полутраекторией, выделенной из траектории L, и обозначается через L(+) или ![]() . Аналогично если решение определено при всех t
. Аналогично если решение определено при всех t ![]() t0, то множество точек траектории L, соответствующих значениям t
t0, то множество точек траектории L, соответствующих значениям t ![]() t0, называется отрицательной полутраекторией, выделенной из траектории L, и обозначается через
t0, называется отрицательной полутраекторией, выделенной из траектории L, и обозначается через ![]() или
или ![]() . Очевидно, если взять другое решение, соответствующее траектории L, при котором точке М0 соответствует значение t1
. Очевидно, если взять другое решение, соответствующее траектории L, при котором точке М0 соответствует значение t1![]() t0, то точки полутраектории
t0, то точки полутраектории ![]() (или
(или ![]() ) будут соответствовать значениям
) будут соответствовать значениям ![]() . Точку М0 мы иногда будем называть «концом» полутраектории. В дальнейшем нам часто придется рассматривать полутраекторию без указания на то, является ли она положительной или отрицательной. В этом случае мы будем обозначать полутраекторию через U ' или L\j0. В случае, когда траектория L является состоянием равновесия или замкнутой траекторией, всякая положительная и всякая отрицательная полутраектория, выделенная из нее, совпадает с ней самой. Полутраекторию, выделенную из незамкнутой траектории, мы будем называть незамкнутой полу траекторией, а полутраекторию, выделенную из замкнутой траектории (очевидно, совпадающую с этой траекторией), будем называть замкнутой полутраекторией.
. Точку М0 мы иногда будем называть «концом» полутраектории. В дальнейшем нам часто придется рассматривать полутраекторию без указания на то, является ли она положительной или отрицательной. В этом случае мы будем обозначать полутраекторию через U ' или L\j0. В случае, когда траектория L является состоянием равновесия или замкнутой траекторией, всякая положительная и всякая отрицательная полутраектория, выделенная из нее, совпадает с ней самой. Полутраекторию, выделенную из незамкнутой траектории, мы будем называть незамкнутой полу траекторией, а полутраекторию, выделенную из замкнутой траектории (очевидно, совпадающую с этой траекторией), будем называть замкнутой полутраекторией.
В математической литературе решение системы (I) часто называют движением. Эта терминология находится в соответствии с «кинематическим» истолкованием динамической системы. Мы также будем пользоваться этой весьма употребительной терминологией. Таким образом, мы будем говорить о движении, соответствующем данным начальным значениям, о траектории, соответствующей данному движению, о движении, соответствующем данной траектории, или, иначе, о движении на траектории (т. е. о решении, соответствующем данной траектории), о периодическом движении и т. д.
Будем также говорить, что траектория L при t = t0 проходит через точку М0, подразумевая при этом, что на траектории L выбрано некоторое определенное движение и при этом движении точке М0 соответствует значение t = t0. Точно так же мы будем говорить: «точка М1 траектории L соответствует значению t = t1 » или «траектория при t = t1 пересекает данную дугу ![]() и т. д., подразумевая под этим, что при данном выбранном движении на L точка М1 или общая точка траектории L и дуги
и т. д., подразумевая под этим, что при данном выбранном движении на L точка М1 или общая точка траектории L и дуги ![]() соответствует значению t= t1 и т. д.
соответствует значению t= t1 и т. д.
Мы будем часто пользоваться следующими выражениями: «траектория L при возрастании (или убывании) входит в данную область или выходит из данной области», «траектория при t > T0 остается в данной области» и другими аналогичными выражениями, не требующими пояснения. Кроме того, укажем следующие обозначения. Если
х = ![]() (t), y =
(t), y = ![]() (t) (28)
(t) (28)
— какое-нибудь движение (т. е. решение), то точку с координатами ![]() (t),
(t), ![]() (t) мы будем обозначать через М (t) и решение (28) — через М=М (t). Если указаны начальные значения, которым соответствует рассматриваемое движение, т. е. движение (решение) записано в виде
(t) мы будем обозначать через М (t) и решение (28) — через М=М (t). Если указаны начальные значения, которым соответствует рассматриваемое движение, т. е. движение (решение) записано в виде
x=![]() (t — t0, х0, у0) , y =
(t — t0, х0, у0) , y = ![]() (t — t0, х0, у0), (29)
(t — t0, х0, у0), (29)
то, обозначая через М0 точку х0, у0, мы будем записывать точку с координатами ![]() (t—t0, х0, у0),
(t—t0, х0, у0), ![]() (t — t0, х0, у0) в виде М (t — t0, M0) и решение (29) —в виде М = М (t — t0, M0).
(t — t0, х0, у0) в виде М (t — t0, M0) и решение (29) —в виде М = М (t — t0, M0).
Похожие работы
... для реализации системы бюджетирования Консультационной группы "Воронов и Максимов". Статья о проблемах выбора системы бюджетирования - в проекте "УПРАВЛЕНИЕ 3000". Бюджетный автомат Если вы решитесь на автоматизацию системы бюджетирования компании, перед вами сразу встанут вопросы: что выбрать, сколько платить, как внедрять. Примеряйте! О ЧЕМ РЕЧЬ В “Капитале” на стр. 44, 45 мы рассказали ...
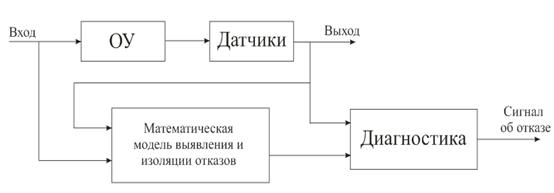



... сети могут быть использованы как классификаторы для разделения образцов рассогласований и формирования сигналов тревог. Таким образом, они могут выявлять и изолировать отказы. 3. Диагностика отказов системы регулирования уровня жидкости в баке 3.1. Постановка задачи Реализацию описанного выше метода диагностики отказов, основанного на моделях будем выполнять применительно к системе ...
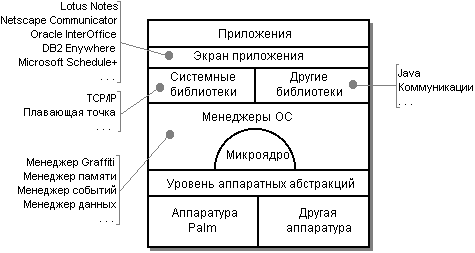
... их интеграция, расширение их возможностей в новых версиях, создание новых средств и перенос их на другие аппаратные платформы и в другие ОС IBM. 12.4 Операционная система z/VM ОС z/VM [21, 24, 42] (последняя версия - V4R2) является высокопроизводительной многопользовательской интерактивной ОС, предоставляющей уникальные возможности в части выполнения различных операционных сред на одном ...
... , может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов. ...
0 комментариев