ПОСТАНОВКА ЗАДАЧИ
Гироскопический измеритель вектора угловой скорости
Аппроксимация плотности земной атмосферы аналитическими зависимостями
Гироскопический измеритель угловой скорости
Определим число импульсов [6, 10, 14]
Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм стабилизации
Решение задачи идентификации отказов
Алгоритм контроля отказов ДС при неполной тяге
РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Моделирование отказов ГИВУС
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Расчет сметы затрат на НИР
Расчет научно-технического эффекта
Заключение
ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
Производственная санитария
Техника безопасности
Пожарная безопасность
СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с
Навигация
Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
175590
знаков
30
таблиц
100
изображений
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет І Кафедра «Системи та процеси
управління»
Спеціальність 7.080202 «Прикладна математика»
ДИПЛОМНА РОБОТА
На одержання кваліфікації інженера-математика
Тема роботи: Розробка алгоритмів контролю та діагностики системи управління
орієнтацією космічного аппарату
Завідуючий кафедрою Голоскоков Є.Г.
Керівник дипломної роботи Кузнецов Ю. О.
Консультанти:
Економічна частина Чекалiна Е.П
Охорона праці та
навколишнього середовища Березуцький В.В.
Цивільна оборона Гуренко І.В.
Нормоконтроль Назаров А.С.
Студент-дипломник Уханов Є.В.
Номер академічної групи І-29
Харків 2005НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Факультет І Кафедра «Системи та процеси
управління»
Спеціальність 7.080202 «Прикладна математика»
ЗАВДАННЯ
На виконання дипломної роботи
Студенту групи І-29 Уханову Євгенію Валерійовичу
Тема роботи: Розробка алгоритмів контролю та діагностики системи управління
орієнтацією космічного аппарату
Затверджено наказом по НТУ «ХПІ» від «___» __________ 200__ р. №_______
Термін здачі студентом закінченої роботи «___» __________ 200__ р.
Вихідні дані до роботи: 1) ГОСТ 4401-73 Стандартная атмосфераю Параметры. Издательство стандартов, 1973. 2) Киреев Н.Г. Аппроксимация и идентификация в задачах динамики полета и управления – К.:НМК ВО, 1992.-196 с. 3) Голоскоков Е.Г., Плаксий Ю.А., Фролов Ю.А. Вопросы приложения методов дифференциальной аппроксимации. – Рук. деп в ВИНИТИ 21.08.81, №4085-81, 19 с.
Розробити документи:
1. Текстові а) аналітичний огляд існуючих моделей; б) обробка теоретичного матеріалу з питань апроксимації; в) побудування моделей різного порядку;
г) аналіз побудованих моделей; д) надання рекомендацій щодо використання побудованих моделей.
2. Графічні: плакати – 5 штук.
Консультанти
| Розділ | Консультанти | Підпис, дата | ||
| Завдання видав | Завдання прийняв | |||
| Економічна частина | Доц.. Чекаліна Е.П. | |||
| Охорона праці та навколишнього середовища | Доц. Березуцький В.В. | |||
| Цивільна оборона | Ас. Гуренко І.В. | |||
КАЛЕНДАРНИЙ ПЛАН
| Етап | Найменування | Термін виконання етапів роьоти |
| 1 | Підбір та проробка наукової лутератури | 01.11.2004 |
| 2 | Аналітичне дослідження проблеми | 10.11.2004 |
| 3 | Написання оглядової частини випускної роботи | 15.11.2004 |
| 4 | Побудування математичної моделі | 25.11.2004 |
| 5 | Написання прикладної програми | 10.12.2004 |
| 6 | Відлагодження програми | 12.12.2004 |
| 7 | Проведення чисельного експерименту | 15.12.2004 |
| 8 | Аналіз результатів | 12.01.2005 |
| 9 | Написання тексту пояснювальної записки | 31.01.2005 |
Студент-дипломник Уханов Є.В.
Керівник проекту Кузнецов Ю.О.
РЕФЕРАТ
Объем записки 169 с, иллюстраций 71, таблиц 18, ссылок 37. Рассматривается задача построение ориентации упругого космического аппарата с учетом моментов внешних сил, возможности отказов командных приборов, таких как гироскопический измеритель вектора угловой скорости и исполнительных органов, таких как двигатели стабилизации большой и малой тяги. Цель работы: разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата. Разработаны алгоритмы построения ориентации упругого космического аппарата, алгоритм стабилизации реактивных двигателей системы управления космического аппарата, алгоритм идентификации отказов двигателей стабилизации. Разработана модель упругого космического аппарата с учетом аэродинамического и гравитационного момента. В законе управления введена возможность гашения шумов, с использованием гистерезиса или паузы по времени, как для двигателей большой тяги, так и для двигателей малой тяги. Для моделирования отказов одного из двигателей стабилизации разработан и внедрен в алгоритм контроля – алгоритм неполной тяги. Разработана математическая модель гироскопического измерителя вектора угловой скорости и алгоритм контроля чувствительных элементов датчика. На базе разработанных алгоритмов и принятой модели космического аппарата, разработан программный комплекс, с применением среды визуального программирования DELPHI 7 и CAD системы визуального моделирования VisSim 5, позволяющие в полной мере моделировать сложные физические процессы с учетом всех параметров как для упругой модели, так и для абсолютно твердого тела. Проведенное моделирование показало высокую эффективность разработанных алгоритмов, что позволяет их применять на практике.Список ключевых слов: СИСТЕМА УПРАВЛЕНИЯ, КОСМИЧЕСКИЙ АППАРАТ, ЗАКОН УПРАВЛЕНИЯ, АЛГОРИТМ КОНТРОЛЯ.
РЕФЕРАТ
Об’єм записки 169 с, ілюстрацій 71, таблиць 18, посилань 37.
Розглядається задача побудови орієнтації пружного космічного апарату х урахуванням моментів зовнішніх сил, можливості відмови командних приборів, таких я к гироскопічни1й вимірювач вектору кутової швидкості та виконавчих органів, таких як двигуни стабілізації великої та малої потуги.
Мета роботи: розробка алгоритмів діагностики та контролю системи управління орієнтацією космічного апарату.
Розроблені алгоритми побудови орієнтації пружного космічного апарату, алгоритм стабілізації реактивних двигунів системи управління космічного апарату, алгоритм ідентифікації відмов двигунів стабілізації. Розроблена модель пружного космічного апарату з урахуванням аеродинамічного та гравітаційного моментів. У законі управління введена можливість гасіння шумів, з використанням гістерезиса або паузи по часу, як для двигунів великої потуги, так і для двигунів малої потуги. Для моделювання відмов одного з двигунів стабілізації розроблено та впроваджено в алгоритм контролю – алгоритм неповної потуги. Розроблена математична модель гіроскопічного вимірювача вектора кутової швидкості та алгоритм контролю чутливих елементів датчика.
На базі розроблених алгоритмів та прийнятої моделі космічного апарату, розроблено програмний комплекс з використанням середовища візуального програмування DELPHI 7 та CAD системи візуального моделювання VisSim 5, які дозволяють у повному обсязі моделювати складні фізичні процеси з урахуванням усіх параметрів як для пружної моделі так і для абсолютно твердого тіла.
Проведене модулювання показало високу ефективність розроблених алгоритмів, що дозволяє їх використовувати на практиці.
Список ключових слів: СИСТЕМА УПРАВЛІННЯ, КОСМІЧНИЙ АПАРАТ, ЗАКОН УПРАВЛІННЯ, АЛГОРИТМ КОНТРОЛЮ.
THE ABSTRACT
Volume 169 pages, case histories 71, tables 18, references 37.
The problem constructing of attitude of an elastic space vehicle with allowance for of moments of external forces, possibility of failures of command instruments, such as a gyroscopic meter of angular-velocity vector and cutting heads, such as motor engines of stabilizing large and low-thrust is esteemed.
The purpose of operation: mining of check algorithms and diagnostic of the attitude control system of a space vehicle.
The algorithms of constructing by attitude of an elastic space vehicle, algorithm of stabilizing of jet engines of a management system of a space vehicle, algorithm of identifying of failures of motor engines of stabilizing are designed. The pattern of an elastic space vehicle with allowance for of aerodynamic and gravitation moment is designed. In a control law are injected a possibility of extinguishing of noises, with usage of a hysteresis or space on time, both for motor engines of large draught, and for verniers. For simulation of failures of one of motor engines of stabilizing is designed and the algorithm of incomplete draught is introduced into a check algorithm -. The mathematical model of a gyroscopic meter of angular-velocity vector and check algorithm of countermeasure feelers of the sensor is designed.
On the basis of designed algorithms and accepted pattern of a space vehicle, the programmatic complex, with applying of environment of visual programming DELPHI 7 and CAD of a system of visual simulation VisSim 5, permitting to the full is designed to model difficult(complex) physical processes with allowance for of all arguments both for the elastic pattern, and for absolute solids.
The held simulation has shown high performance of designed algorithms, that allows them to put into practice.
The agenda of keywords: a management SYSTEM, SPACE VEHICLE, CONTROL LAW, CHECK ALGORITHM.ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
АНУ – алгоритм начальной установки;
БИНС – бесплатформенная инерциальная навигационная система;
БСК – базовая система координат;
БСО – бесплатформенная система ориентации;
БЦВМ – бортовая вычислительная машина;
БЦК – бортовой цифровой комплекс;
ВСК – визирная система координат;
ГИВУС – гироскопический измеритель вектора угловой скорости;
ГО – гражданская оборона;
ДБТ – двигатели большой тяги;
ДМТ – двигатели малой тяги;
ДС – двигатели стабилизации;
ДУС – датчик угловой скорости;
ИНС – инерциальная навигационная система;
ИО – исполнительные органы;
ИПП – индивидуальный противохимический пакет;
КА – космический аппарат;
ЛА – летательный аппарат;
ММ – математическая модель;
НИР – научно-исследовательская работа;
НКА – научный космический аппарат;
НТЭ - научно-технический эффект;
ОВ – отравляющие вещества;
ОП – опасная продолжительность;
ОУ – объект управления;
ПЗ – полетное задание;
ПО – признак отказа;
ПЗУ – постоянное запоминающее устройство;
ПСК – приборная система координат;
СБ – солнечные батареи;
СГК – силовой гироскопический комплекс;
ССК – связанная система координат;
СУО – система управления ориентацией;
УВВ – устройство ввода-вывода;
ФОВ – фосфороорганические отравляющие вещества;
ЦВМ – центральная вычислительная машина;
ЧЭ – чувствительный элемент;
ЭВМ – электронная вычислительная машина;
ЭМИ – электромагнитный импульс;
ЭЭ – экономический эффект.
СОДЕРЖАНИЕ
| ВВЕДЕНИЕ………………………………………………………................ 1 ПОСТАНОВКА ЗАДАЧИ……………………………………………......... 2 СИСТЕМЫ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КА НА БАЗЕ БИНС…... 2.1 Бесплатформенные инерциальные навигационные системы……...2.2 Гироскопический измеритель вектора угловой скорости………… 3 МАТЕМАТИЧЕСКИЕ МОДЕЛИ………………….……………………... 3.1 Математическая модель упругого космического аппарата………... 3.2 Моменты, действующие на космический аппарат………...……….. 3.2.1 Аэродинамический момент……………………………………. 3.2.1.1 Аппроксимация стандартной атмосферы……………. 3.2.1.2 Построение аппроксимирующего полинома для плотности земной атмосферы………………………… 3.2.2 Гравитационный момент………………………………………. 3.3 Математическая модель ГИВУС…………………………………….. 4 АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ И КОНТРОЛЯ СУО И СТАБИЛИЗАЦИИ КА…………………………………………………….. 4.1 Синтез наблюдателя Льюинбергера………………………………… 4.2 Алгоритм оценки угловой скорости………………………………… 4.3 Алгоритм обработки и контроля информации ГИВУС……………. 4.4 Алгоритм стабилизации……………………………………………… 4.5 Решение задачи идентификации отказов…………………………… 4.6 Метод статистически гипотез………………………………………... 4.7 Алгоритм контроля отказов ДС при неполной тяге………………... 5 РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ………………….. 5.1 Моделирование отказов ГИВУС…………………………………….. 5.2 Моделирование отказов ДС………………………………………….. 6 ЭКОНОМИЧЕСКАЯ ЧАСТЬ……………………..………………………. 6.1 Обзор существующих методов……………………………….......... 6.2 Смета затрат на НИР………………………………………………... 6.3 Расчет научно-технического эффекта……………………………... 6.4 Расчет экономического эффекта…………………………………... 6.5 Заключение………………………………………………………….. 7 ГРАЖДАНСКАЯ ОБОРОНА………………...…………………………… 8 ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ …….……………….….. 8.1 Общие вопросы охраны труда………………………………………… 8.2 Производственная санитария…………………………………………. 8.3 Техника безопасности…………………………………………………. 8.4 Пожарная безопасность………………………………………………... 8.5 Охрана окружающей среды…………………………………………… ЗАКЛЮЧЕНИЕ………………….…………………………………………. Список источников информации……………………………………......... Приложение А……………………………………………………………… Приложение Б……………………………………………………………… Приложение В……………………………………………………………… Приложение Г……………………………………………………………… Приложение Д……………………………………………………………… | 11 12 15 23 28 35 35 39 39 45 47 48 56 62 62 64 72 80 86 89 93 96 99 101 103 104 106 108 109 113 114 123 123 127 131137139141142 145 147 156 158 161 |
ВВЕДЕНИЕ
Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность.
Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «неотключение» двигателя, кроме того, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Отказы чувствительных элементов гироскопического измерителя вектора угловой скорости, могут приводить к не выполнению задачи системы управления ориентацией космического аппарата.Существующие методы контроля работоспособности ДС являются достаточно грубыми, чтобы выявлять отказ типа "неотключение" при наличии остаточной неполной тяги двигателя на фоне действия внешних возмущающих моментов (гравитационных, аэродинамических и др.). Поэтому разработка алгоритмов идентификации отказов двигателей стабилизации, особенно отказов с неполной тягой при наличии шумов измерений и действии внешних возмущающих воздействий, является актуальной задачей.
Таким образом, разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей.
В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
Похожие работы
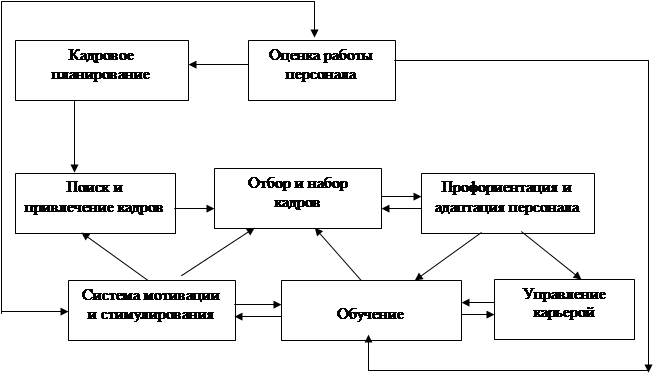
... удостоверение установленной формы. 3. Предложения по повышению эффективности системы управления персоналом в службе ЭРТОС филиала «Аэронавигация Центральной Волги» ФГУП «Госкорпорация по ОрВД» Анализ существующей системы управления персоналом в службе ЭРТОС показал, что требуется совершенствование существующей системы оплаты труда, необходимо уделить внимание подготовке кадрового ...
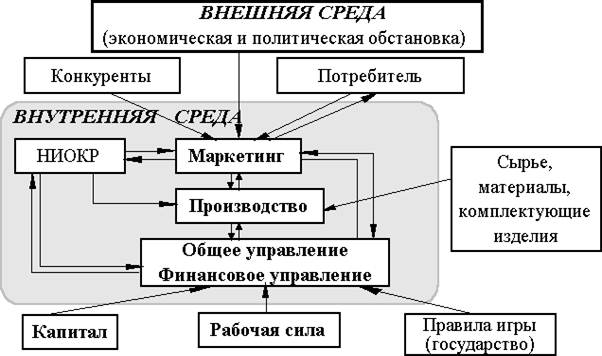
... определенной долей государственного регулирования, направленного на достижение оптимального соотношения притязаний предпринимателя в его деятельности по получению прибыли и принципа общественной справедливости. 2.2.Проблемы управления фирмой в условиях рынка При переходе к рыночной экономике предприятия России столкнулись с массой проблем, решить которые все разом оказалось большинству из них ...

... техника одержали новую выдающуюся победу, Успешно выполнен испытательный запуск универсальной ракетно-космической транспортной системы "Энергия" и орбитального корабля "Буран". Подтверждены правильность принятых инженерных и конструкторских решений, эффективность методов экспериментальной отработки и высокая надежность всех систем этого сложнейшего ...
... элементов, глобальное пространство имен, а также лавинообразную первоначальную загрузку сети. Таким образом ОСРВ SPOX имеет необходимые механизмы для создания отказоустойчивой распределенной операционной системы реального времени, концепция построения которой описана в главе 2. 4.3 Аппаратно-зависимые компоненты ОСРВ Модули маршрутизации, реконфигурации, голосования реализованы как аппаратно- ...
0 комментариев