1.5 ОБЗОР ЛИТЕРАТУРНЫХ И ПАТЕНТНЫХ ИСТОЧНИКОВ
Из литературных и проспектных источников фирмы "Зульцер" известно, что фирма уделяет большое внимание повышению надежности механизмов приемной коробки. На последних моделях станков Р7100 и Р7200 устанавливается двухпозиционный тормоз прокладчиков с серводвигателем. Источником сигнала служат два индуктивных датчика, расположенные под движущимся под тормозами прокладчиком. Усиленный сигнал от датчиков подается на серводвигатель, который изменяет усилие торможения в зависимости от массы прокладчиков или степени их износа. При этом все прокладчики останавливаются в приемной коробке в одном строго заданном положении.
Фирмой предложено новое конструктивное решение исполнения механизма укладчика - патент США 4,338,973 от 13 июля 1982 г.
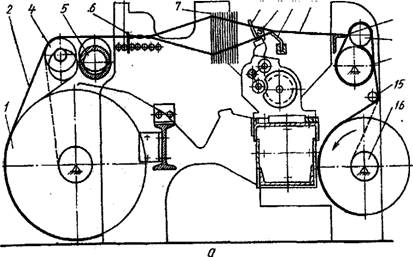
Согласно этому патенту толкатель 3 совершает возвратно-поступательное движение по двум направляющим 10 в вертикальном прямолинейном канале 2 приемной коробки. Нижний конец 16 толкателя изготавливается из резины или пластмассы и имеет конфигурацию, совпадающую с прокладчиком. Использование резины на конце толкателя при укладке прокладчиков изменяет характер удара, делая его абсолютно неупругим; тем самым исключается разрушение прокладчика и транспортера. (Рис. 5а, 5б)
Изменение движения толкателя с качательного на возвратно-поступательное повышает точность позиционирования механизма и надежность его работы.
Более ранние патенты фирмы "Зульцер" N 289961 и N 304246 также касаются механизма укладчика на транспортер. В них предложены различные варианты более точного позиционирования прокладчиков перед их укладкой на транспортер в виде щеколд зависимого действия. Щеколды поворачиваются и освобождают прокладчик под действием движущегося толкателя. (Рис. 6, 7)
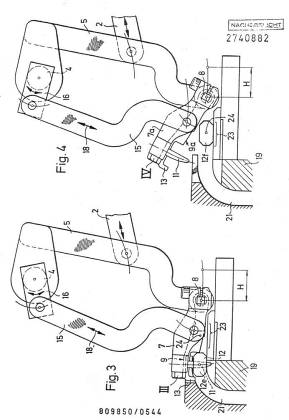
В патенте фирмы "Зульцер" N 2740882 предлагается конструктивное решение механизма раскрывателя прокладчика, которое обеспечивает более четкую его ориентацию перед освобождением уточной нити за счет скобы 9, имеющей конфигурацию прокладчика. При опускании вниз скоба 9 своим боковым выступом 9-а центрирует прокладчик относительно зуба 11, который при движении вниз точно проходит между ветвями пружины, раздвигает их и, тем самым, освобождает уточную нить. (Рис. 8а, 8б, 8в.)
Краткий обзор литературных и патентных источников указывает на то, что фирма "Зульцер", освоившая производство бесчелночных станков еще в 1957 году, продолжает заниматься их усовершенствованием, уделяя в своих разработках большое внимание механизмам приемной коробки.
Это подтверждает актуальность выбранной темы дипломного проекта по модернизации приемной коробки.
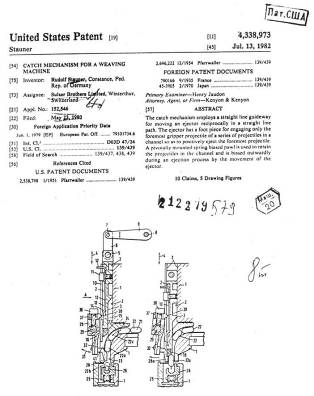
Рис. 5а
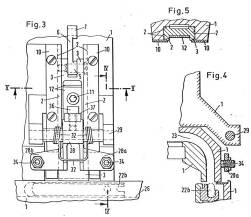
Рис. 5б
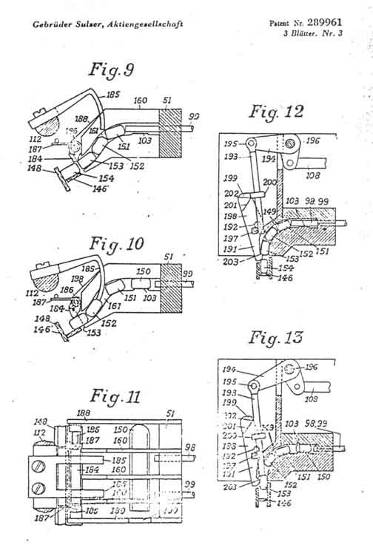
Рис. 6
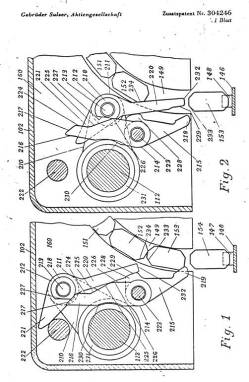

Рис. 8а
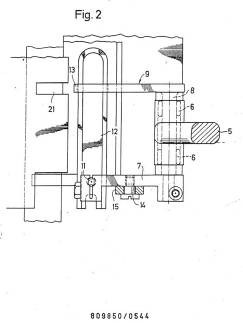
Рис. 8б
1.6 ИССЛЕДОВАНИЕ МЕХАНИЗМА УКЛАДКИ ПРОКЛАДЧИКОВ НА ТРАНСПОРТЕР
1.6.1 КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА
Механизм предназначен для укладки прокладчиков, находящихся в направляющих приемной коробки, на транспортер.
К особенностям работы механизма следует отнести укладку прокладчиков в шаге (254 мм) между гонками транспортера, независимо от заправочной ширины станков. Это достигается смещением начала работы механизма посредством поворота спаренных кулаков его привода относительно главного вала станка. Для этого на станках СТБ в зависимости от начала боя 105 град, или 140 град, установлены следующие углы работы механизма - 49 град. , 150 град. , 260 град, и 60 град. , 170 град. , 280град., соответственно.
Опыт эксплуатации станков СТБ показывает, что механизм очень чувствителен к зазорам и требует тщательной регулировки. Незначительные отклонения в исходном положении толкателя по сравнению с тем, которое указано в инструкции по эксплуатации, связанные с наличием зазоров в шарнирных соединениях, приводят к нарушению работы механизма и, как следствие, к останову станка.
Кроме того, при повышении скоростного режима станков СТБ в процессе эксплуатации выявился износ щеколды, выступов толкателей, планки транспортера, а также отскок прокладчика при укладке его на транспортер.
Исследование механизма проводилось аналитическим методом с целью более точного нахождения кинематических характеристик движения и условий взаимодействия движущегося толкателя с неподвижным прокладчиком. В качестве исходных данных принималась расчетная конструкторская документация на указанный механизм.
Кинематическая схема механизма приведена на рис. 9. Механизм О2АВO3 представляет собой двухкоромысловый механизм с приводом коромысла О2А от спаренных кулаков, расположенных на главном валу станка.
При исследовании подобных сложных по структурным схемам механизмов обычно используют метод припасовки. Следуя этому методу, сложный механизм представляется в виде простых механизмов, соединяемых последовательно.
При этом выходные кинематические характеристики конечного звена первого механизма являются входными характеристиками второго механизма и т.д.
Используя метод припасовки, представим схему механизма укладчика в виде двух простейших механизмов рис. 10, рис. 11 -кулачкового с качающимся коромыслом - звено АО2D и четырехзвенного механизма –O2ABO3.
Рассмотрим схему кулачково-коромыслового механизма O1DO2A, где OD - теоретический радиус-вектор кулака, a AO2D - коромысло (рис. 10) и составим основные аналитические зависимости для угла поворота, скорости и ускорения коромысла в функции радиус-вектора кулака. Подобные зависимости необходимы для проведения анализа работы механизма, так как радиус-векторы кулака заданы в табличной форме.
На рис. 10 показаны два положения коромысла AO2D (начальное) и A1O2D1 при повороте кулака на угол, соответствующий радиус-вектору RTKI.
О2D1 = 74,5
О2D2 = 74,5
О2А = 92
АВ = 240,812
О3В = 12
α = 60,75˚
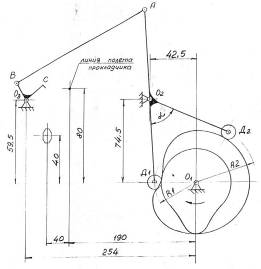
Рис. 9 Кинематическая схема механизма укладчика прокладчика на траспортер.
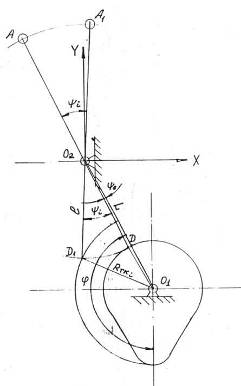
Рис. 10
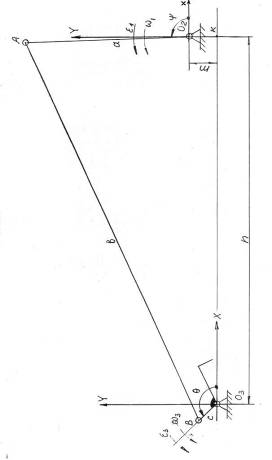
Обозначим межцентровое расстояние О1О2 через L радиус-вектор кулака через RTKi, длину коромысла O2D через l, начальный угол, определяющий положение коромысла, через Y0, а текущий угол поворота коромысла через Y1, угол поворота кулака через φ.
Из известных соотношений между углами и сторонами в треугольнике можно записать:
R2TKi = L2 + l2 – 2Llcos(Y0 + Yi)(1)
Отсюда найдем угол поворота коромысла Yi

Y
i = arcos – Y
0(2)
Из полученного выражения (2), имея табличную зависимость между RTKi и Yi (текущим углом поворота кулака), задаваясь изменением RTKi получим изменение угла Y: Y = f(RTKi) или Y = f(φ). При получении табличной зависимости Y = f(φ) в виде неравноотстоящих значений можно воспользоваться известными методами интерполяции и экстраполяции, при этом угол φ находится с постоянным необходимым для кинематического исследования шагом.
Продифференцируем полученное выражение (1) по углу поворота кулака φ, принимая во внимание, что угловая скорость вращения кулака ωK = const.

2R
TKi = 2Llsin(Y
0 + Y
i) (3)
Сокращая и преобразовывая полученное выражение (3) имеем:

= . (4)
Принимая во внимание что:

ω
1 = =
. = ω
K (5)
где: - угловая скорость кулака, принимаем ее постоянной,
ω1 - угловая скороость коромысла.
Обозначив через аналог угловой скорости коромысла Kω1,
запишем выражение (5) в следующем виде:
ω1 = Kω1 . ωK(6)
Продифференцируем выражение (6) по времени "t" для нахождения углового ε1 ускорения коромысла
ε
1 =

ε
1 =
. ω
K =
.. ω
K (7)
Учитывая, что = ω
K, выражение для углового ε
1 ускорения коромысла примет вид

ε
1 =
. ω
K2 (8)
Обозначив аналог углового ускорения коромысла через Kε
1 получим
ε1 = Kε1. ωK2(9)
Аналог углового ускорения Kε1, коромысла найдем, дифференцируя выражение (4) по углу φ, рассматривая его как произведение двух функций, одна из которых представляет собой дробь.
После преобразований получим:
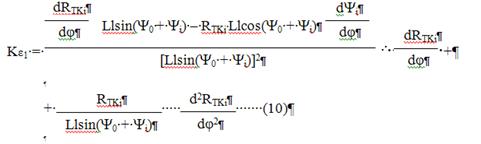
Для вычисления аналогов угловых скоростей и ускорений используем формулы численного дифференцирования:
где: h - шаг дифференцирования, равен шагу таблицы, то есть углу изменения радиус-вектора кулака;
RTki+2 , RTki+1 , RTki-2 , RTki-1 - значения радиус-векторов кулака, отстоящие от точки, для которой проводятся вычисления, на один или два шага вперед или назад.
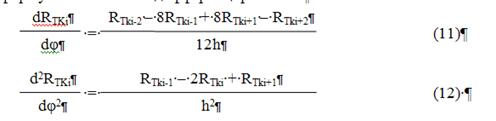
Вычисление углов поворота, аналогов скоростей и ускорений коромысла AO2D поводилось на ЭВМ. Результаты вычислений представлены в таблице 2 и на рис. 12, 13, 14.
Анализ расчетных данных показывает, что профили кулаков имеют погрешности, которые сказываются на работе механизма.
Таблица 2 Результаты анализа поворота кулачково-рычажного механизма
| L = 85.300 l = 74.500 |
| 1 | 2 | 3 | 4 | 5 | 6 |
| Угол Фи(0) | Радиус, R(tk) | Угол Пси, Y | Угол Пси (тек), Yi | Скорость K(w) | Ускорение K(e) |
| 0 | 40.642 | 28.452 | 2.919 | | |
| 1 | 41.074 | 28.784 | 3.251 | | |
| 2 | 41.519 | 29.127 | 3.594 | 0.00605 | -0.000075 |
| 3 | 41.974 | 29.477 | 3.944 | 0.00616 | -0.000051 |
| 4 | 42.436 | 29.832 | 4.299 | 0.00623 | -0.000035 |
| 5 | 42.901 | 30.190 | 4.657 | 0.00625 | -0.000022 |
| 6 | 43.366 | 30.547 | 5.014 | 0.00623 | -0.000011 |
| 7 | 43.828 | 30.903 | 5.370 | 0.00616 | 0.000001 |
| 8 | 44.282 | 31.252 | 5.719 | 0.00604 | 0.000030 |
| 9 | 44.727 | 31.594 | 6.061 | 0.00590 | -0.000028 |
| 10 | 45.159 | 31.927 | 6.394 | 0.00570 | -0.000003 |
| 11 | 45.574 | 32.247 | 6.714 | 0.00546 | 0.000006 |
| 12 | 45.971 | 32.552 | 7.019 | 0.00520 | 0.000011 |
| 13 | 46.347 | 32.842 | 7.309 | 0.00491 | 0.000016 |
| 14 | 46.700 | 33.114 | 7.581 | 0.00458 | 0.000019 |
| 15 | 47.027 | 33.366 | 7.833 | 0.00423 | 0.000021 |
| 16 | 47.329 | 33.599 | 8.066 | 0.00388 | 0.000023 |
| 17 | 47.603 | 33.810 | 8.277 | 0.00350 | 0.000025 |
| 18 | 47.849 | 34.000 | 8.467 | 0.00312 | 0.000027 |
| 19 | 48.067 | 34.168 | 8.635 | 0.00275 | 0.000029 |
| 20 | 48.257 | 34.315 | 8.782 | 0.00238 | 0.000033 |
| 21 | 48.420 | 34.441 | 8.902 | 0.00202 | 0.000044 |
| 22 | 48.557 | 34.546 | 9.013 | 0.00167 | 0.000258 |
| 23 | 48.669 | 34.633 | 9.100 | 0.00135 | -0.000016 |
| 24 | 48.758 | 34.702 | 9.169 | 0.00107 | -0.000002 |
| 25 | 48.828 | 34.756 | 9.223 | 0.00079 | 0.000005 |
| 26 | 48.876 | 34.793 | 9.260 | 0.00053 | 0.000004 |
| 27 | 48.909 | 34.818 | 9.285 | 0.00036 | 0.000004 |
| 28 | 48.930 | 34.834 | 9.301 | 0.00021 | 0.000003 |
| 29 | 48.941 | 34.843 | 9.310 | 0.00009 | 0.000003 |
| 30 | 48.944 | 34.845 | 9.312 | -0.00001 | 0.000003 |
| 31 | 48.939 | 34.841 | 9.308 | -0.00012 | 0.000003 |
| 32 | 48.926 | 34.831 | 9.298 | -0.00025 | 0.000004 |
| 33 | 48.900 | 34.811 | 9.278 | -0.00045 | 0.000005 |
| 34 | 48.858 | 34.779 | 9.246 | -0.00069 | 0.000004 |
| 35 | 48.797 | 34.732 | 9.199 | -0.00095 | 0.000003 |
| 36 | 48.714 | 34.668 | 9.135 | -0.00141 | 0.000000 |
| 37 | 48.592 | 34.573 | 9.040 | -0.00163 | -0.000318 |
| 38 | 48.471 | 34.480 | 8.947 | -0.00188 | 0.000034 |
| 39 | 48.308 | 34.354 | 8.821 | -0.00240 | 0.000040 |
| 40 | 48.117 | 34.207 | 8.674 | -0.00276 | 0.000032 |
| 41 | 47.898 | 34.038 | 8.505 | -0.00315 | 0.000029 |
| 42 | 47.650 | 33.847 | 8.314 | -0.00352 | 0.000027 |
| 43 | 47.376 | 33.635 | 8.102 | -0.00386 | 0.000025 |
| 44 | 47.077 | 33.405 | 7.872 | -0.00418 | 0.000022 |
| 45 | 46.756 | 33.157 | 7.624 | -0.00457 | 0.000020 |
| 46 | 46.415 | 32.894 | 7.361 | -0.00376 | 0.000019 |
| 47 | 46.158 | 32.696 | 7.163 | -0.00535 | -0.000006 |
| 48 | 45.648 | 32.304 | 6.771 | -0.00520 | 0.000037 |
| 49 | 45.391 | 32.106 | 6.573 | -0.00471 | -0.000026 |
| 50 | 44.920 | 31.743 | 6.210 | -0.00593 | 0.000016 |
| 51 | 44.540 | 31.451 | 5.918 | -0.00495 | -0.000070 |
| 52 | 44.168 | 31.167 | 5.631 | -0.00503 | 0.000011 |
| 53 | 43.793 | 30.876 | 5.343 | -0.00490 | -0.000004 |
| 54 | 43.441 | 30.605 | 5.072 | -0.00466 | -0.000007 |
| 55 | 43.099 | 30.342 | 4.809 | -0.00446 | -0.000011 |
| 56 | 42.778 | 30.095 | 4.562 | -0.00417 | -0.000013 |
| 57 | 42.478 | 29.864 | 4.331 | -0.00387 | -0.000015 |
| 58 | 42.203 | 29.653 | 4.120 | -0.00351 | -0.000016 |
| 59 | 41.955 | 29.462 | 3.929 | -0.00314 | -0.000016 |
| 60 | 41.735 | 29.293 | 3.720 | -0.00277 | -0.000015 |
| 61 | 41.543 | 29.145 | 3.612 | -0.00238 | -0.000014 |
| 62 | 41.380 | 29.020 | 3.487 | -0.00200 | -0.000013 |
| 63 | 41.245 | 28.916 | 3.383 | -0.00163 | -0.000011 |
| 64 | 41.136 | 28.832 | 3.299 | -0.00129 | -0.000009 |
| 65 | 41.052 | 28.767 | 3.234 | -0.00097 | -0.000007 |
| 66 | 40.991 | 28.721 | 3.188 | -0.00068 | -0.000005 |
| 67 | 40.949 | 28.688 | 3.155 | -0.00045 | -0.000004 |
| 68 | 40.923 | 28.668 | 3.135 | -0.00025 | -0.000003 |
| 69 | 40.910 | 28.658 | 3.125 | -0.00012 | -0.000002 |
| 70 | 40.904 | 28.654 | 3.121 | -0.00003 | -0.000001 |
| 71 | 40.903 | 28.653 | 3.120 | -0.00004 | 0.000001 |
| 72 | 40.896 | 28.647 | 3.114 | -0.00015 | 0.000002 |
| 73 | 40.878 | 28.634 | 3.101 | -0.00035 | 0.000003 |
| 74 | 40.842 | 28.606 | 3.073 | -0.00060 | 0.000003 |
| 75 | 40.784 | 28.564 | 3.031 | -0.00090 | 0.000002 |
| 76 | 40.707 | 28.502 | 2.969 | -0.00126 | -0.000003 |
| 77 | 40.599 | 28.419 | 2.886 | -0.00163 | -0.000020 |
| 78 | 40.464 | 28.315 | 2.782 | -0.00200 | -0.000130 |
| 79 | 40.301 | 28.190 | 2.657 | -0.00237 | 0.000100 |
| 80 | 40.111 | 28.004 | 2.511 | -0.00273 | 0.000052 |
| 81 | 39.896 | 27.878 | 2.345 | -0.00303 | 0.000039 |
| 82 | 39.661 | 27.698 | 2.165 | -0.00328 | 0.000031 |
| 83 | 39.409 | 27.504 | 1.971 | -0.00348 | 0.000026 |
| 84 | 39.145 | 27.300 | 1.767 | -0.00539 | 0.000022 |
| 85 | 38.876 | 27.093 | 1.560 | -0.00362 | 0.000018 |
| 86 | 38.607 | 26.886 | 1.353 | -0.00359 | 0.000014 |
| 87 | 38.343 | 26.683 | 1.150 | -0.00348 | 0.000011 |
| 88 | 38.091 | 26.489 | 0.956 | -0.00328 | 0.000009 |
| 89 | 37.856 | 26.308 | 0.775 | -0.00303 | 0.000006 |
| 90 | 37.642 | 26.143 | 0.610 | -0.00272 | 0.000005 |
| 91 | 37.452 | 25.997 | 0.464 | -0.00238 | 0.000004 |
| 92 | 37.289 | 25.871 | 0.338 | -0.00200 | 0.000004 |
| 93 | 37.154 | 25.767 | 0.234 | -0.00163 | 0.000004 |
| 94 | 37.047 | 25.685 | 0.154 | -0.00125 | 0.000004 |
| 95 | 36.967 | 25.623 | 0.090 | -0.00091 | 0.000004 |
| 96 | 36.911 | 25.580 | 0.047 | -0.00060 | 0.000003 |
| 97 | 36.876 | 25.553 | 0.020 | -0.00035 | 0.000003 |
| 98 | 36.858 | 25.539 | 0.006 | -0.00016 | 0.000002 |
| 99 | 36.851 | 25.534 | 0.001 | -0.00004 | 0.000001 |
| 100 – 339 | 36.850 | 25.533 | 0.000 | 0.00000 | 0.000000 |
| 340 | 36.851 | 25.534 | 0.001 | 0.00003 | 0.000001 |
| 341 | 36.855 | 25.537 | 0.004 | 0.00009 | 0.000001 |
| 342 | 36.865 | 25.545 | 0.012 | 0.00020 | 0.000002 |
| 343 | 36.886 | 25.561 | 0.028 | 0.00036 | 0.000002 |
| 344 | 36.919 | 25.586 | 0.053 | 0.00055 | 0.000003 |
| 345 | 36.969 | 25.625 | 0.092 | 0.00079 | 0.000003 |
| 346 | 37.037 | 25.677 | 0.144 | 0.00105 | 0.000003 |
| 347 | 37.126 | 25.746 | 0.213 | 0.00136 | 0.000003 |
| 348 | 37.239 | 25.833 | 0.300 | 0.00168 | 0.000003 |
| 349 | 37.376 | 25.939 | 0.406 | 0.00201 | 0.000004 |
| 350 | 37.539 | 26.064 | 0.531 | 0.00238 | 0.000004 |
| 351 | 37.730 | 26.211 | 0.678 | 0.00275 | 0.000006 |
| 352 | 37.948 | 26.379 | 0.846 | 0.00312 | 0.000008 |
| 353 | 38.195 | 26.569 | 1.036 | 0.00350 | 0.000011 |
| 354 | 38.469 | 26.780 | 1.247 | 0.00378 | 0.000016 |
| 355 | 38.771 | 27.013 | 1.480 | 0.00423 | 0.000024 |
| 356 | 39.099 | 27.265 | 1.732 | 0.00458 | 0.000037 |
| 357 | 39.452 | 27.537 | 2.004 | 0.00491 | 0.000060 |
| 358 | 39.829 | 27.827 | 2.294 | | |
| 359 | 40.226 | 27.132 | 2.599 | | |
| 360 | 40.642 | 27.652 | 2.919 | | |

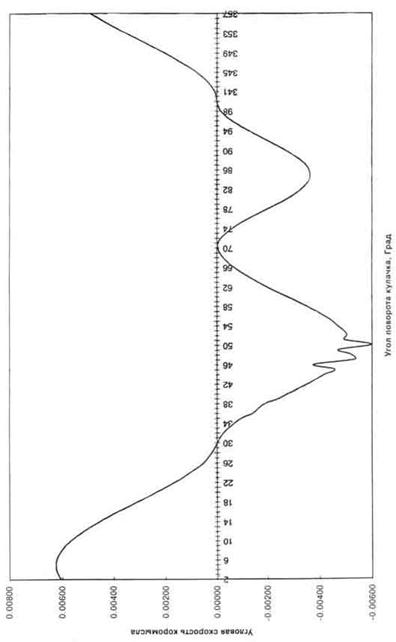


Эти погрешности в виде резких скачков особенно проявляются на графиках скоростей и ускорений коромысла AO2D.
Последовательно с кулачково-коромысловым механизмом соединен четырехзвенный О2АВО3 механизм, ведущим звеном которого является коромысло кулачкового механизма (рис. 11).
Для четырехзвенного механизма О2АВО3 примем систему координат, в которой оси X, Y направим через шарниры О2 и О3 (как показано на рис. 11). Углы поворота звеньев О2А и О3В будем отсчитывать в направлении против часовой стрелки.
Обозначим: О2А = a, АВ = b , О3В = c ,O3K = n , О2К = m , угол поворота, скорость и ускорение звена О2А через Y, ω1, ε1, а угол поворота, скорость и ускорение звена О3В через Θ, ω3, ε3.
Составим аналитические зависимости для последующих расчетов на ЭВМ между углами поворота, скоростями и ускорениями ведущего O2A и ведомого О3В звеньев четырехзвенного механизма. Спроектируем звенья механизма на оси X и Y и найдем координаты точек А и В.
XA = O3K + O2A cosY = n + a cosY(13)
YA = O2K + O2A sinY = m + a sinY(14)
XB = O3B . cosΘ = c cosΘ(15)
YB = O3B . sinΘ = c sinΘ(16)
Расстояние между точками А и В найдется:
b2 = (XA – XB)2 + (YA – YB)2(17)
Подставив в выражение (17) выражения (13), (14), (15), (16) получим:
b2 = (n + a cosY – c cosΘ)2 + (m + a sinY – c sinΘ)2(18)
Преобразуем полученное выражение (18) относительно угла φ. Для этого раскроем скобки и выполним приведение подобных членов.
b2 = n2 + a2cos2Y + c2cos2Θ + 2an cosY – 2nc cosΘ –2ac cosY + m2 +
+ a2sin2Y + c2sin2Θ + 2am sinY – 2mc sinΘ – 2ac sinΘ sinY
Или
b2 = –2c(n + a cosY)cosΘ – 2c(a sinY – m)sinΘ +
+ 2a(n cosY – m sinY) + a2 + c2 + n2 + m2(19)
Перенося в правую часть "" получим выражение для неявной функции, которую обозначим:
F(Y,Θ) = –2с(n + a cosY)cosΘ – 2c(m – a sinY)sinΘ +
+ 2a(n cosY – m sinY) + a2 – b2 + c2 + n2 + m2(20)
Обозначим через:.
A1 = –2c(n + a cosY)
A2 = –2c(–m + a sinY)
A3 = – [2a(n cosY – m sinY) + a2 – b2 + c2 + n2 + m2]
и запишем выражение для F(Y,Θ) в следующем виде:
F(Y,Θ) = A1 cosΘ + A2 sinΘ + A3(21)
Решение уравнения (21) запишем в виде выражений для тригонометрических функций двух углов, что удобно при расчете на ЭВМ.


sinΘ = (22)
cosΘ = (23)
значения угла Θ находятся в виде обратной тригонометрической функции

Θ = arccos(24)
Для принятой системы отсчета углов перед корнем принимается знак " + ". Дифференцируя неявную функцию F(Y,Θ) находим зависимость между угловыми скоростями звеньев О2А и О3В, т. е. между ω1 и ω3.


Обозначим аналог угловой скорости звена О
3В через Kω
3, который равен отношению , тогда
ω3 = Kω3. ω1(25)
Для нахождения аналога Kω3 угловой скорости продифференцируем по углу Y выражение (20).

Kω
3 = –
dF / dΘ = 2с(n + a sinY)sinΘ – 2c(m + a sinY)cosΘ = 2с[(n + a cosY)sinΘ – (m + a sinY)cosΘ](26)
dF / dY = 2aс cosΘ sinY – 2aс sinΘ cosY + 2am cosY – 2an sinY == 2a[(с cosΘ – n)sinY – (с sinΘ – m)cosY](27)
| a[(с cosΘ – n)sinY – (с sinΘ – m)cosY] |
|
отсюда
| c[(n + a cosY)sinΘ – (a sinY + m)cosΘ] |
|

Kω
3 = (28)
Для нахождения углового ε3 ускорения звена О3В продифференцируем выражение (25).

ε
3 =
или

ε
3 =
отсюда


ε
3 =
. ω
1
+ Kω
3 (29)

Имея в виду, что есть угловое ε
3 ускорение звена О
2А, а первое слагаемое выражения (29) можно преобразовать, заменив переменную дифференцирования, получим


ω
1 =
. ω
12тогда, окончательно запишем выражение для ε3
ε
3 =
. ω
12 + Kω
3. ε
1(30)
Таким образом, ускорение ведомого звена, в случае если ведущее звено вращается с ускорением, состоит из двух слагаемых, одно из которых представляет произведение второй производной неявной функции F(Y,Θ) на квадрат ω
1 угловой скорости ведущего звена, а второе слагаемое – произведение аналога угловой скорости ведомого звена на угловое ускорение ведущего звена. Для вычисления ε
3 необходимо иметь аналитическое выражение для, поскольку выражения для остальных сомножителей и слагаемых получены ранее. Для нахождения продифференцируем дважды выражение (21).

Найдем производные, входящие в состав выражения (31).

= 2c[(n + a cosY)sinΘ – (m + a sinY)cosΘ](32)
= 2c[(n + a cosY)cosΘ + (m + a sinY)sinΘ](33)
= 2a[(c cosΘ – n)sinY – (c sinΘ – m)cosY](34)
= 2a[(c cosΘ – n)cosY + (c sinΘ – m)sinY](35)
= 2ac cosY sinΘ – 2ac sinY sinΘ – 2ac sinY cosΘ – 2ac cosY cosΘ(36)
Преобразуем полученное выражение (36).
= 2ac[(cosY – sinY)sinΘ – (sinY + cosY)cosΘ](37)
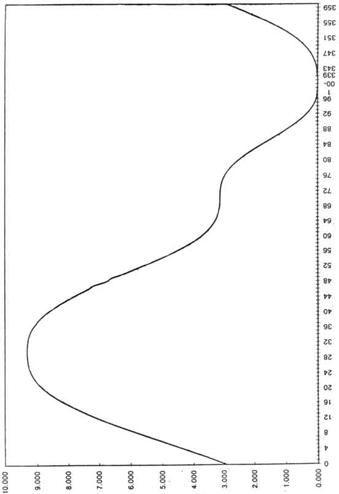
С учетом полученных выражений и расчетной конструкторской документацией на кулаки укладчика, имеющейся на заводах-изготовителях, был выполнен расчет кинематических характеристик скорости Kω3 и ускорения Kε3 ведомого звена – О3В толкателя. Результаты вычислений в виде графиков представлены на рис. 15, 16, 17.
Расчеты проводились для кулаков, используемых в механизме укладки на станках СТБ с углами боя 105 и 140 град, при различных заправочных ширинах станков от 180 до 330 см.
Из рассмотрения графиков следует:
· цикл движения укладчика на узких станках (СТБ - 180, СТБ - 220) составляет 120 град. (рис. 15, рис. 16), из них - 30 град. - подход укладчика к прокладчику (т. А), 40 град. - укладка прокладчиков на транспортер и 50 град. - отход в исходное положение,
· цикл движения укладчика на широких станках (СТБ-250, СТБ-330) составляет 125 град, (рис. 17), из них - 30 град. - подход укладчика к прокладчику (т. А), 40 град. - укладка прокладчиков на транспортер, 15 град. - выстой в нижнем положении и 40 град, - отход в исходное положение,
теоретическое начало контакта выступов толкателя с прокладчиком соответствует нулевым значениям скорости и ускорения (т. А на графиках) и происходит при φ углах поворота спаренного кулака укладчика, равных 286 град, и 348 град, для станков с началом боя 105 град, и 140 град., соответственно. Однако, даже допустимый (обусловленный изготовлением и сборкой) в пределах 5 град, угол поворота четырехзвенного О2АВО3 механизма в виду большой крутизны кривых скорости и ускорения приводит к искажению характера взаимодействия укладчика с прокладчиком. Контакт этих деталей приобретает ударный, характер, следствием чего является износ и разрушение деталей.

Рис. 15 СТБ-180, СТБ-220 з-д «Сибтекстильмаш»
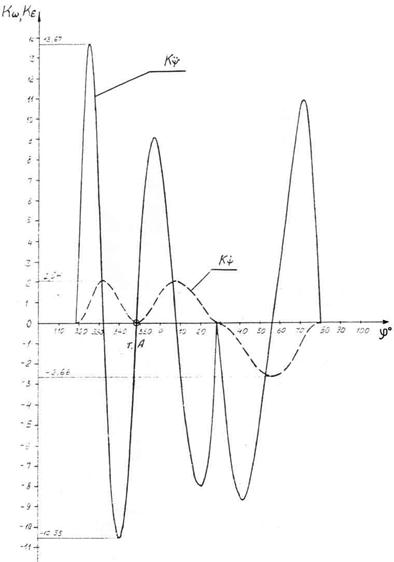
Рис. 16 СТБ-180, СТБ-220 Чебоксарский Машзавод

Рис. 17 СТБ-250, СТБ-330
Новосибирский з-д «Сибтекстильмаш», Чебоксарский Машзавод
Кинематическое исследование механизма показало, чтобы сделать механизм малочувствительным к настройке и зазорам, необходимо расширить его цикловую диаграмму, уменьшить крутизну ветвей кривой ускорения и снизить до минимума скорость укладчика к моменту контакта с прокладчиком.
... загораний. Умейте правильно определять категории производств по взрыво- и пожароопасности, а для этого надо знать, какими показателями характеризуется каждая категория производства. Изучите классификацию производственных помещений по Правилам устройства электроустановок (ПУЭ) и умейте выбирать 5)Средства защиты работающих от опасностей.Системы автоматики.Методы повышения травмобезопасности ...
0 комментариев