Анализ системы с пропорциональным регулятором
Проверка устойчивости замкнутой системы
Запасы устойчивости
Построение ЛАЧХ желаемой системы в соответствии с требованиями ТЗ
Анализ скорректированной системы
Критический коэффициент усиления системы
Определение оценок прямых ПК
Оценка перерегулирования
Переходные функций системы, прямые ПК
Сигнал с постоянной скоростью
ОБЛАСТЬ УСТОЙЧИВОСТИ
Определение автоколебаний в замкнутой системе
Навигация
Переходные функций системы, прямые ПК
Проектирование системы оптимального корректирующего устройства
36555
знаков
18
таблиц
35
изображений
2.1.2 Переходные функций системы, прямые ПК
Построим переходную характеристику системы (рис. 2.1) по выходу ОУ (по выходу системы). Выражение для построения:
![]()
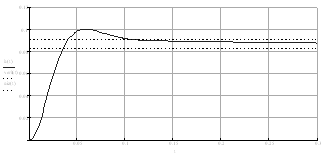
Рис. 2.1. Переходная характеристика системы по выходу системы
Определим прямые ПК по выходу системы (см. п.1.2.3).
Перерегулирование:
![]() ,
,
где hmax= 0,101;
hуст= 0,0873;
h(0) = 0.
![]() .
.
Границы интервала для установившегося значения [0,083;0,092].
Время регулирования: tр = 0,104 с.
Построим переходную характеристику системы (рис. 2.2) по выходу ДОС. Выражение для построения:
![]()
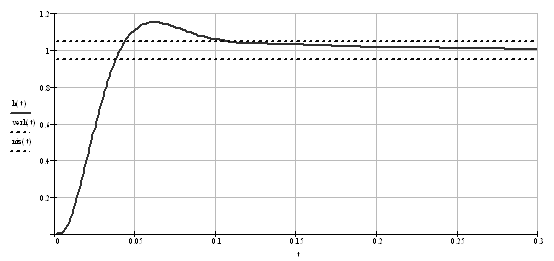
Рис. 2.2. Переходная характеристика системы по выходу ДОС
Определим прямые ПК (см. п.1.2.3).
Перерегулирование:
![]() ,
,
где hmax= 1,151;
hуст= 1;
h(0) = 0:
![]() .
.
Границы интервала для установившегося значения [0,95;1,05].
Время регулирования: tр = 0,106 с.
Полученные прямые ПК по выходу системы и по выходу ДОС, а также оценки ПК, найденные в пп.1.4.3 и 1.4.4 занесем в таблицу (табл. 2.2).
Таблица 2.2
| По выходу системы | По выходу ДОС | Оценки прямых ПК | ||
| Нижняя граница | Верхняя граница | |||
|
| 15,4 | 15,14 | 6,65 | 35 |
| tр, с | 0,104 | 0,106 | 0,053 | 0,292 |
ПК найденные по выходу системы и по выходу ДОС различаются незначительно. Это объясняется тем, что в обратной связи имеется малая постоянная времени, практически не влияющая на динамические свойства системы.
Из таблицы также видно, что полученные ПК находятся в пределах нижней и верхней границ, найденных в пп.1.4.3 и 1.4.4.
2.1.3 Сравнение начальных и установившихся значений переходных функций
Определим начальное и установившееся значение переходной функций по выходу УМ:
![]()
![]() ,
, ![]() .
.
Начальные и установившиеся значения переходных функций, рассчитанные в пп.2.1.1 и 2.1.2, совпадают. Эти значения приведены в табл. 2.3.
Таблица 2.3
|
|
|
|
|
|
| |
|
| 0 | 0 | 0 | 0 | 4415,98 | 4415,98 |
|
| 0,0873 | 0,0873 | 1 | 1 | 0 | 0 |
2.1.4 Определим величину Y0 ступенчатого сигнала, при котором система работает в зоне линейности УМ
Допустимая величина ступенчатого сигнала Y0, при котором система работает в зоне линейности УМ:
![]() ,
,
где ![]() B – максимальное выходное напряжение УМ;
B – максимальное выходное напряжение УМ;
![]() – максимальное значение выходного сигнала УМ на единичное ступенчатое воздействие.
– максимальное значение выходного сигнала УМ на единичное ступенчатое воздействие.
Тогда:
![]() B.
B.
Похожие работы

... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...


... и конструкций значительно влияет на: сокращение стоимости отделки зданий сооружений; трудоемкость; расход основных материалов; число ремонтов и их стоимость. Глава 3. Улучшение деятельности в процессах 3.1 Исследование и анализ процессов управления системы менеджмента качества Стандарты ИСО 9001: 2000 предлагают новый подход к построению СМКп, которая состоит из (рис.3.1): -политики в ...
... методику проектирования систем регулирования и позволяет создавать высокоэффективные автоматические системы для самых различных отраслей народного хозяйства. Полученные таким образом системы автоматического регулирования обеспечивают высокое качество выпускаемой продукции, снижают ее себестоимость и увеличивают производительность труда. 1. Общая часть. 1.1. Основные понятия Преобразование ...
0 комментариев