Анализ системы с пропорциональным регулятором
Проверка устойчивости замкнутой системы
Запасы устойчивости
Построение ЛАЧХ желаемой системы в соответствии с требованиями ТЗ
Анализ скорректированной системы
Критический коэффициент усиления системы
Определение оценок прямых ПК
Оценка перерегулирования
Переходные функций системы, прямые ПК
Сигнал с постоянной скоростью
ОБЛАСТЬ УСТОЙЧИВОСТИ
Определение автоколебаний в замкнутой системе
Навигация
Построение ЛАЧХ желаемой системы в соответствии с требованиями ТЗ
Проектирование системы оптимального корректирующего устройства
36555
знаков
18
таблиц
35
изображений
2. Построение ЛАЧХ желаемой системы в соответствии с требованиями ТЗ.
Желаемую ЛАЧХ условно разделяют на три участка: низкочастотный, среднечастотный, высокочастотный.
Низкочастотный участок отвечает за точность системы в установившемся режиме, причем, чем шире этот участок (по оси ![]() ), тем больший диапазон частот воспроизводится системой без заметного ослабления. На этом участке ЛАЧХ должна проходить выше запретной области (см. табл. 1.3). Минимальный коэффициент усиления, обеспечивающий данное условие рассчитан в п.1.2.1:
), тем больший диапазон частот воспроизводится системой без заметного ослабления. На этом участке ЛАЧХ должна проходить выше запретной области (см. табл. 1.3). Минимальный коэффициент усиления, обеспечивающий данное условие рассчитан в п.1.2.1:
![]() .
.
Также необходимо чтобы желаемая ЛАЧХ проходила как можно ближе к границе запретной области, поэтому низкочастотный участок состоит из двух асимптот. Первая асимптота пересекает ось ![]() в точке
в точке ![]() и имеет наклон -20 дБ/дек. Вторая асимптота с наклоном -40 дБ/дек начинается на частоте сопряжения
и имеет наклон -20 дБ/дек. Вторая асимптота с наклоном -40 дБ/дек начинается на частоте сопряжения ![]() , которая соответствует наиболее близкому расположению асимптоты к запретной области. Точке пересечения второй асимптоты с осью
, которая соответствует наиболее близкому расположению асимптоты к запретной области. Точке пересечения второй асимптоты с осью ![]() соответствует базовая частота:
соответствует базовая частота:
 ,
,
где ![]() – первая постоянная времени желаемой ЛАЧХ.
– первая постоянная времени желаемой ЛАЧХ.
![]() .
.
Среднечастотный участок определяет устойчивость, запасы устойчивости и, следовательно, качество переходных процессов. Так как в ТЗ задан показатель колебательности, то для построения данного участка необходимо воспользоваться методом Бесекерского. Постоянные времени определяются по формулам:
![]() ,
,
 ,
,
где ![]() ;
; ![]() ;
; ![]() .
.
Тогда:
![]() ,
, ![]() .
.
Таким образом, среднечастотный участок ЛАЧХ начинается на частоте
![]() ,
,
имеет наклон -20 дБ/дек, и продолжается до следующей частоты сопряжения
![]()
соответствующей высокочастотному участку.
Высокочастотный участок ЛАЧХ определяет устойчивость системы к помехам. Чтобы уменьшить влияние высокочастотных помех, необходимо иметь как можно больший наклон асимптот. Высокочастотный участок начинается на частоте ![]() и затем формируется путем последовательного увеличения наклонов на сопрягающих частотах
и затем формируется путем последовательного увеличения наклонов на сопрягающих частотах
![]()
и
![]() .
.
3. Определение вида и параметров передаточной функции последовательного КУ.
Передаточная функция полученной желаемой ЛАЧХ:
![]() .
.
Передаточная функция последовательного КУ определяется по формуле:

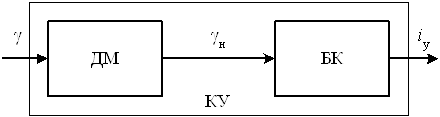
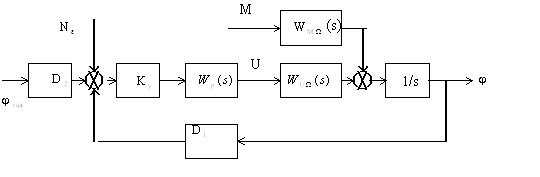
Последовательное КУ включается в прямую цепь непосредственно после элемента сравнения (рис.1.13 и рис.1.14).
![]()
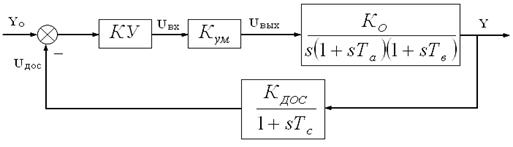
Рис. 1.13. Структурная схема скорректированной системы в общем виде
![]()

Рис. 1.14. Структурная схема скорректированной системы с числовыми параметрами
4. Проверочный расчет, подтверждающий правильность проведенного синтеза
Проведем анализ скорректированной системы на соответствие требованиям ТЗ.
1. Заданные в ТЗ и рассчитанные значения амплитудно-фазовых искажений (см. п.1.1) приведены в табл. 1.7.
Таблица 1.7
|
| 0…0,15 | 0,15…0,5 | 0,5… 1,3 | |
|
| 0,942 | 3,142 | 8,168 | |
| Заданные значения |
| 0,1 | 0,4 | 2,5 |
|
| 3 | 5 | 16 | |
| Расчетные значения |
| 0,009 | 0,095 | 0,417 |
|
| 0,624 | 2,262 | 7,653 | |
2. Для определения величины показателя колебательности системы запишем выражение АЧХ ЗС по выходу ДОС и построим график (рис. 1.15):


Рис. 1.15. АЧХ замкнутой системы
Показатель колебательности (см. п.1.1):
![]() .
.
Исходя из требований, показатель колебательности не должен превышать 1,25.
Соответствие показателя колебательности требованиям ТЗ также можно определить по графику ЛФЧХ скорректированной разомкнутой системы. Для этого на графике ЛФЧХ необходимо построить запретную зону [2, §7.5]. В диапазоне частот:
![]() ,
,
график ЛФЧХ не должен заходить в зону, ограниченную прямой -180o и кривой -180o +![]() , где
, где
 ;
; ![]() ;
; ![]() .
.
На рис. 1.16 видно что график ЛФЧХ не заходит в эту запретную зону, следовательно, показатель колебательности не превышает заданного в ТЗ значения.
Вывод: корректирующее устройство рассчитано верно, скорректированная система соответствует требованиям ТЗ.
Похожие работы
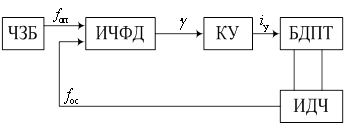

... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...


... и конструкций значительно влияет на: сокращение стоимости отделки зданий сооружений; трудоемкость; расход основных материалов; число ремонтов и их стоимость. Глава 3. Улучшение деятельности в процессах 3.1 Исследование и анализ процессов управления системы менеджмента качества Стандарты ИСО 9001: 2000 предлагают новый подход к построению СМКп, которая состоит из (рис.3.1): -политики в ...
... методику проектирования систем регулирования и позволяет создавать высокоэффективные автоматические системы для самых различных отраслей народного хозяйства. Полученные таким образом системы автоматического регулирования обеспечивают высокое качество выпускаемой продукции, снижают ее себестоимость и увеличивают производительность труда. 1. Общая часть. 1.1. Основные понятия Преобразование ...
0 комментариев