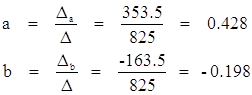
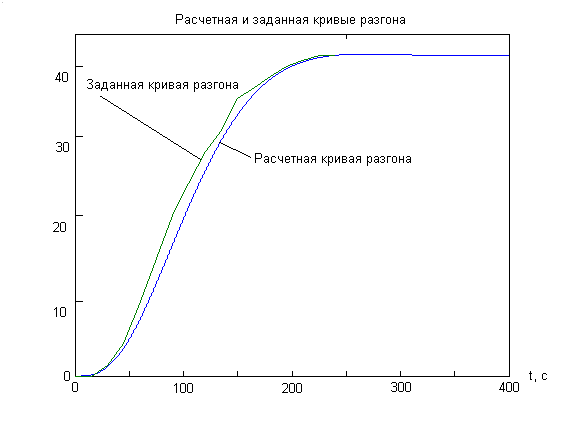
Расчёт коэффициентов передачи объекта
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА
Расчёт частотных характеристик в системе MathCAD
Расчет расширенных частотных характеристик объекта
ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
ПИ – регулятор
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Замкнутая система с И – регулятором
Замкнутая система с П – регулятором по возмущению
ОЦЕНКА КАЧЕСТВА РАБОТЫ САУ
Навигация
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Линейные автоматические системы регулирования
61629
знаков
361
таблица
80
изображений
6 ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
6.1 Разомкнутые системы
Разомкнутыми системами называются такие системы, в которых отсутствует обратная связь между выходом объекта и входом устройства управления.
Различают разомкнутые системы автоматического управления, у которых управление осуществляют по задающему извне воздействию, а также системы, где управление осуществляется по возмущению. Наиболее перспективными являются системы, управление которых производят по задающему воздействию и по возмущению.
Структурная схема разомкнутой САУ изображена на рисунке 14.
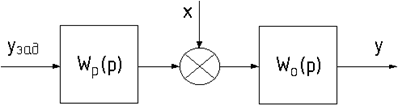
Рисунок 13 – Структурная схема разомкнутой системы
Передаточной функцией такой системы будет следующее выражение:
![]() ,
,
Где:
![]() - передаточная функция объекта,
- передаточная функция объекта,
![]() - передаточная функция регулятора.
- передаточная функция регулятора.
В нашем случае передаточная функция объекта имеет вид:
![]()
Передаточные функции регуляторов:
1. Для П – регулятора:
![]() .
.

2. Для И – регулятора:
![]() .
.

3. Для ПИ – регулятора:
![]() .
.

6.2 Замкнутые системы
В этих системах устройство управления исключает все отклонения выходной величины, вызванные любыми возмущениями, а также внешними и внутренними помехами. Замкнутая система представляет собой замкнутый контур из устройства управления и объекта. При этом имеется обратная связь, связывающая выход системы с входом. Ее наличие и обуславливает почти стопроцентную точность управления.
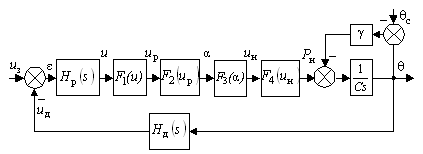
Структурная схема замкнутой САУ изображена на рисунке 15:
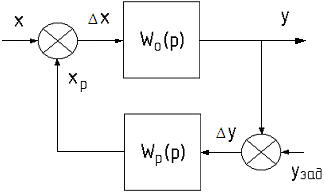
Рисунок 14 – Структурная схема замкнутой системы
Передаточной функцией такой системы будет следующее выражение:
1. по возмущению
![]() ;
;
2. по управлению
![]() .
.
Подставив все известные выражения передаточных функций объекта регулирования и регуляторов, получим передаточные функции систем с различными регуляторами:
-c П – регулятором:
![]()
![]()
- c И – регулятором:
![]() ;
;
![]()
- c ПИ – регулятором:
![]()
![]()
7 ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
7.1 Постановка задачиСистема автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость.
Исследование замкнутых АСР на устойчивость предполагает получение ответов на следующие вопросы. Является ли система с рассчитанным регулятором устойчивой, то есть, возвращается ли она в состояние равновесия при наличии возмущений? Какие из параметров системы (объекта и регулятора) и каким образом влияют на устойчивость? При каких предельных значениях параметров система становится неустойчивой? Каков запас устойчивости системы при заданных значениях параметров?
7.2 Методы исследования САУ на устойчивостьДля исследования на устойчивость замкнутых САУ разработано множество методов:
определение устойчивости по корням характеристического уравнения, по критерию Гурвица, по критерию Рауса, по частотному критерию Михайлова, по частотному критерию Найквиста и другие.
Передаточную функцию замкнутой системы можно представить в виде:
![]() ,
,
Где ![]() и
и ![]() - полиномы по степеням
- полиномы по степеням ![]() .
.
Уравнение ![]() - характеристическое уравнение системы, описывающее невозмущенное состояние.
- характеристическое уравнение системы, описывающее невозмущенное состояние.
Если все действительные корни характеристического уравнения и действительные части комплексных корней будут отрицательны, то система под воздействием любого возмущения, после его снятия, возвратится в исходное состояние, а значит, система будет устойчивой.
Критерий Гурвица
При оценке устойчивости из коэффициентов характеристического уравнения составляется определитель Гурвица вида:
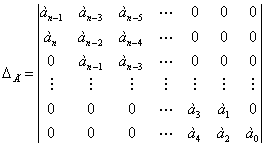
Для устойчивости САУ необходимо и достаточно, чтобы полный определитель Гурвица и все частные определители, образованные вычеркиванием соответствующих строк и столбцов были одного знака с ![]() .
.
Критерий Рауса
Для проверки устойчивости составляется таблица коэффициентов по правилам, приведенным в таблице 20.
Таблица 20 – Критерий Рауса
| --- |
|
|
|
| --- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система будет устойчива, если все коэффициенты таблицы Рауса положительны, то есть ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]() и так далее. Если в характеристическом уравнении
и так далее. Если в характеристическом уравнении ![]() , то умножаем все коэффициенты исходного характеристического уравнения на -1.
, то умножаем все коэффициенты исходного характеристического уравнения на -1.
Критерий Михайлова
При исследовании устойчивости строится годограф ![]() характеристического уравнения
характеристического уравнения ![]() замкнутой системы. Для устойчивости системы необходимо и достаточно, чтобы годограф
замкнутой системы. Для устойчивости системы необходимо и достаточно, чтобы годограф ![]() при изменении частоты от 0 до
при изменении частоты от 0 до ![]() , начиная с положительной действительной полуоси и двигаясь против часовой стрелки, последовательно проходил
, начиная с положительной действительной полуоси и двигаясь против часовой стрелки, последовательно проходил ![]() квадрантов (где
квадрантов (где ![]() – порядок полинома), нигде не обращаясь в нуль.
– порядок полинома), нигде не обращаясь в нуль.
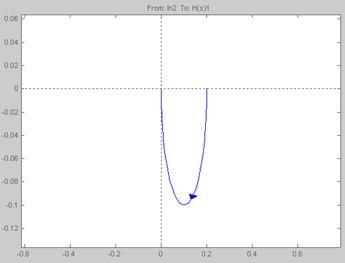
Критерий устойчивости Найквиста
Данный критерий формулируется следующим образом: если разомкнутая система устойчива, то для устойчивости системы в замкнутом состоянии необходимо и достаточно, чтобы амплитудно-фазовая характеристика разомкнутой системы не охватывала точку на действительной оси с координатами ![]() . Расстояние от этой точки до точки пересечения годографа с действительной осью называется запасом устойчивости.
. Расстояние от этой точки до точки пересечения годографа с действительной осью называется запасом устойчивости.
Необходимо отметить, что при исследованиях на устойчивость по критериям Михайлова и Найквиста рассчитываются и строятся графики АФХ характеристического уравнения (критерий Михайлова) или разомкнутой АСР (критерий Найквиста), что является трудоемкой задачей. Поэтому для построения АФХ используется ЭВМ.
7.3 Проверка устойчивости САУ по критерию Рауса 7.3.1 Замкнутая система с П – регулятором
Для замкнутой системы с П – регулятором составим таблицу 21, подставив в соответствующие ячейки коэффициенты при ![]() из знаменателя передаточной характеристики системы:
из знаменателя передаточной характеристики системы:
![]()
Используя правила из таблицы 20, составим таблицу 21
Таблица 21 – Критерий Рауса для системы с П – регулятором
| Коэффициенты ri | Номера столбцов | |||
| 1 | 2 | 3 | 4 | |
| – | 0,004 | 0,378 | 1,654 | 0 |
| – | 0,056 | 1,723 | 3,178 | 0 |
| 0,071 | 0,256 | 1,428 | 0 | 0 |
| 0,219 | 1,410 | 3,178 | 0 | 0 |
| 0,182 | 0,850 | 0 | 0 | 0 |
| 1,659 | 3,178 | 0 | 0 | 0 |
| 0,267 | 0 | 0 | 0 | 0 |
Из таблицы 21 видно, что замкнутая система с П – регулятором устойчива, так как выполняется необходимое условие устойчивости по критерию Рауса.
Похожие работы
... , является то, что в замкнутой системе все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь. Автоматические системы регулирования должны обеспечивать: - устойчивость системы при любых режимных ситуациях объекта; - минимальное время регулирования; - минимальные динамические и статические отклонения регулируемой величины, не выходящие ...
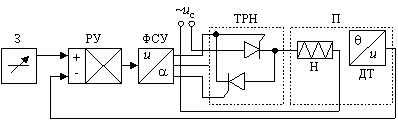
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...

... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
... системой: время наработки на отказ системы увеличилось на 2,73%. Вывод В ходе курсовой работы было произведено техническое обеспечение автоматической системы регулирования качества стабильного гидрогенизата. Были выбраны средства контроля и регулирования и обоснован их выбор. Был произведен расчет надежности контура регулирования, и предложена схема для резервирования самого ненадежного ...
0 комментариев