Расчёт коэффициентов передачи объекта
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА
Расчёт частотных характеристик в системе MathCAD
Расчет расширенных частотных характеристик объекта
ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
ПИ – регулятор
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Замкнутая система с И – регулятором
Замкнутая система с П – регулятором по возмущению
ОЦЕНКА КАЧЕСТВА РАБОТЫ САУ
Навигация
Линейные автоматические системы регулирования
Линейные автоматические системы регулирования
61629
знаков
361
таблица
80
изображений
РОСАТОМ
СЕВЕРСКАЯ ГОСУДАРСТВЕННАЯ ТЕХНОЛОГИЧЕСКАЯ АКАДЕМИЯ
Кафедра Э и АФУ
ЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
КУРСОВОЙ ПРОЕКТ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
200600.В075.01.000 ПЗ
Преподаватель:
_________В.Я. Дурновцев
«___»____________2008 г.
Студент:
__________И.А. Акелькин
«___»____________2008 г.
Северск – 2008
СОДЕРЖАНИЕ
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1 ПОСТРОЕНИЕ СТАТИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА
1.1 Статическая модель объекта первого порядка
1.2 Статистическая модель объекта второго порядка
1.3 Расчёт коэффициентов передачи объекта
2 ПОСТРОЕНИЕ ДИНАМИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА
2.1 Динамическая модель объекта 1-го порядка без запаздывания
2.2 Динамическая модель объекта 1-го порядка с запаздыванием
2.3 Динамическая модель объекта 2-го порядка без запаздывания
2.4 Динамическая модель объекта 2-го порядка с запаздыванием
3 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА
3.1 Приведение к нормальной системе дифференциальных уравнений
3.2 Решение нормальной системы уравнений методом Рунге-Кутта, с постоянным шагом.
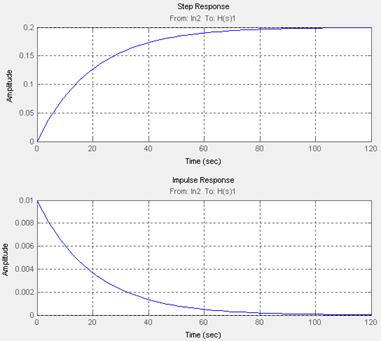
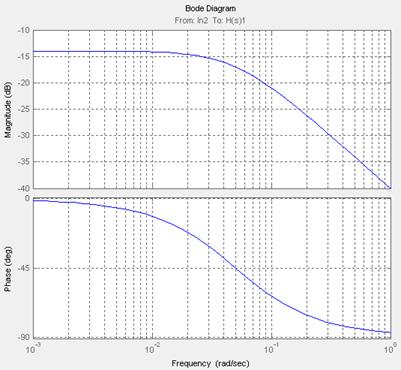
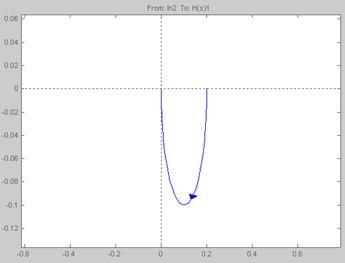
4 ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ОБЪЕКТА
4.1 Частотные характеристики
4.1.1 Расчёт частотных характеристик вручную
4.1.2 Расчёт частотных характеристик в системе MathCAD.
4.2 Расчет расширенных частотных характеристик объекта.
4.2.1 Расчет расширенных частотных характеристик объекта в системе MathCAD13
5 ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
5.1 П - регулятор
5.1.1 Расчёт П - регулятора вручную
5.1.2 Расчёт П - регулятора в системе MathCAD
5.2 И – регулятор.
5.2.1 Расчёт И – регулятора вручную.
5.2.2 Расчёт И – регулятора в системе MathCAD
5.3 ПИ – регулятор
5.3.1 Расчёт ПИ – регулятора вручную
5.3.2 Расчёт ПИ – регулятора в системе MathCAD
6 ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
6.1 Разомкнутые системы
6.2 Замкнутые системы
7 ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
7.1 Постановка задачи
7.2 Методы исследования САУ на устойчивость
7.3 Проверка устойчивости САУ по критерию Рауса
7.3.1 Замкнутая система с П – регулятором
7.3.2 Замкнутая система с И – регулятором
7.3.3 Замкнутая система с ПИ – регулятором
7.4 Проверка устойчивости систем по частотному критерию Найквиста
7.4.1 Разомкнутая система с П – регулятором
7.4.2 Разомкнутая система с И – регулятором
7.4.3 Разомкнутая система с ПИ-регулятором
7.5 Проверка устойчивости САУ по корням характеристического уравнения
7.5.1 Замкнутая система с П – регулятором по возмущению
7.5.2 Замкнутая система с И – регулятором по возмущению
7.5.3 Замкнутая система с ПИ – регулятором по возмущению
7.6 Проверка устойчивости САУ по критерию устойчивости Гурвица
7.6.1 Замкнутая система с П – регулятором по управлению
7.6.2 Замкнутая система с И – регулятором по управлению
7.6.3 Замкнутая система с ПИ – регулятором по управлению
7.7 Проверка устойчивости САУ по частотному критерию Михайлова
7.7.1 Замкнутая система с П – регулятором по возмущению
7.7.2 Замкнутая система с И – регулятором по возмущению
7.7.3 Замкнутая система с ПИ – регулятором по возмущению
8 ПОСТРОЕНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ
8.1 Постановка задачи. Методы решения
8.2 Построение переходных процессов в замкнутых системах по возмущению
8.2.1 Система с П – регулятором
8.2.2 Система с И – регулятором
8.2.3 Система с ПИ – регулятором
8.3 Построение переходных процессов в замкнутых системах по управлению
8.3.1 Система с П – регулятором
8.3.2 Система с И – регулятором
8.3.3 Система с ПИ – регулятором
9 ОЦЕНКА КАЧКСТВА РАБОТЫ САУ
9.1 Постановка задачи. Критерии качества переходных процессов
9.2 Оценка качества замкнутых САУ по возмущению
9.2.1 Система с П – регулятором
9.2.2 Система с И – регулятором
9.2.3 Система с ПИ – регулятором
9.3 Оценка качества замкнутых САУ по управлению
9.3.1 Система с П – регулятором
9.3.2 Система с И – регулятором
9.3.3 Система с ПИ – регулятором
ЗАКЛЮЧЕНИЕ
ЛИТЕРАТУРА
ВВЕДЕНИЕ
Автоматизация производственных процессов является одним из главнейших факторов повышения производительности общественно полезного труда и улучшения качества выпускаемой продукции. На этапе проектирования технологического процесса, установки, объекта должен быть выполнен синтез автоматической системы регулирования (АСР) по параметрам будущего объекта. При сооружении объекта необходимо смонтировать элементы АСР и установить настроечные параметры. На работающем объекте, параметры которого очень часто отличаются от проектных или существенно изменяются в процессе длительной эксплуатации, необходимо исследовать объект, построить его математическую модель в виде статической и динамической характеристик, произвести расчет параметров настройки выбранных регуляторов (а часто и выбрать тип регулятора), установить эти параметры и оценить качество функционирования системы "объект - регулятор".
Даже из перечисления работ видно, что трудоемкость проектирования и исследования любых АСР значительна. Трудоемкость вычислений настолько велика, что часто за отведенное время невозможно уложиться с полным расчетом одной АСР, не говоря уже о вариантном переборе различных АСР, о приобретении навыков в системе расчетов и о получении интуитивного понимания различных АСР. Поэтому решение поставленной задачи: за один фрагмент учебных занятий (лабораторные, практические занятия, курсовое проектирование) выполнить вариантный расчет АСР для заданного объекта (дифференциальными уравнениями, передаточной функцией или экспериментальными данными) - может быть найдено только на пути активного взаимодействия в системе "Пользователь - ЭВМ". Такая программа работ может быть дополнена экспериментальным исследованием реального объекта (или его модели, стенда) и настройкой рассчитанных параметров регулятора с проверкой работоспособности всей системы по заданным критериям качества.
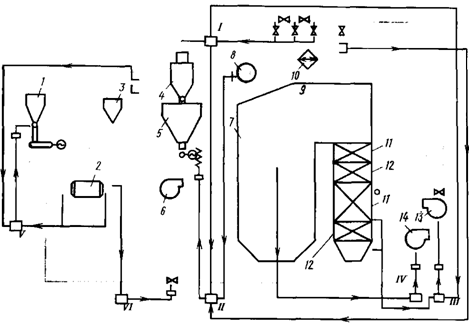
1 ПОСТРОЕНИЕ СТАТИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА
Статический объект - такой объект, у которого выходная величина является функцией от входной y=f(x) и не изменяется с течением времени.
Для того, чтобы знать поведение статического объекта, строят математическую модель, описывающую в аналитической форме зависимость выходного сигнала от сигнала на входе объекта.
Постановка задачи:
Для получения статической характеристики объекта регулирования необходимо выполнить следующие действия:
- задаться рядом значений входной величины x;
- для каждого xi, поданного на вход объекта выдержать время, необходимое для завершения переходного процесса;
- зарегистрировать значение выходного сигнала yi.
Для построения статической модели, статического объекта, мы имеем значения входных и соответствующих им выходных величин в таблице 1.
Таблица 1 – Исходные данные
| I | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| X | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
| Y | 3 | 4,1 | 5 | 6 | 7 | 7,5 | 7,8 | 8,2 | 9 |
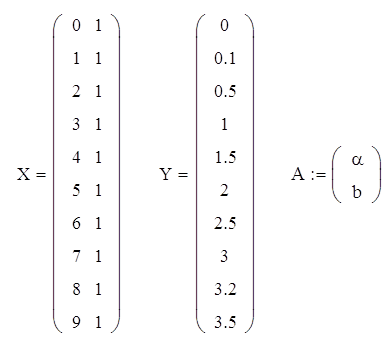
Объект первого порядка (линейная модель) описывается уравнением вида y=ax+b. Для нахождения коэффициентов a и b, удовлетворяющих всем состояниям объекта регулирования составим систему линейных алгебраических уравнений.
Для решения данной системы уравнений воспользуемся методом Крамара.
X∙А=Y
XТX∙А=XТY
где ![]() - матрица с неизвестными величинами
- матрица с неизвестными величинами
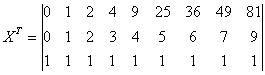
Составим соответствующие матрицы входных и выходных сигналов:

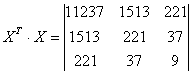
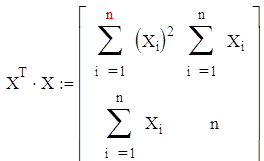
- произведение ![]() :
: 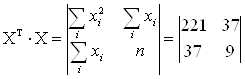
![]()
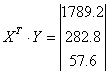
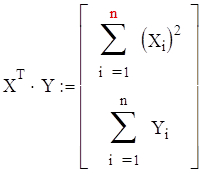
- произведение ![]() :
: ![]()


![]()
![]()
Вычислили значения коэффициентов: а=0,668; b=3,655
Окончательно получим уравнение: y = 0,668x + 3,655
Для качественной оценки полученного полинома вычислим аналитически значения функции и сравним их с экспериментальными данными. Результаты сведем в таблице 2.
Таблица 2 – Результаты расчёта
| X | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
| Yзад | 3 | 4.1 | 5 | 6 | 7 | 7.5 | 7.8 | 8.2 | 9 |
| Yаналит | 3.655 | 4.323 | 4.991 | 5.659 | 6.327 | 6.995 | 7.663 | 8.331 | 9.667 |
| ΔY | 0.655 | 0.223 | -0.009 | -0.341 | -0.673 | -0.505 | -0.137 | 0.131 | 0.667 |
| ΔY2 | 0.429 | 0.050 | 0.000 | 0.116 | 0.453 | 0.255 | 0.019 | 0.017 | 0.449 |
![]()
Далее приведен проверочный расчет линейной аппроксимации на ЭВМ в программной среде MathCAD.
Вектор данных:
Длина вектора: ![]()
![]()
Оператор slope определяет тангенс угла образованного аппроксимирующей прямой и положительным направлением оси ОХ, т.е. определяет коэффициент при х.
![]()
![]()
Оператор intercept определяет точку пересечения аппроксимирующей прямой с осью OY, т.е. определяет свободный член.
![]()
![]()
Получаем уравнение аппроксимирующей прямой:
![]()
Определяем сумму квадратов отклонений:
![]()
![]()
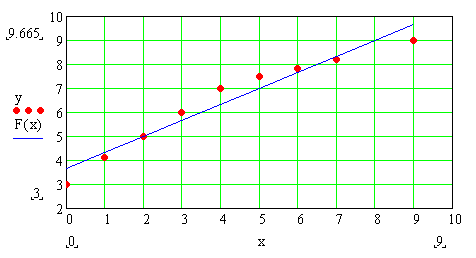
Рисунок 1 – График статической модели 1-го порядка
1.2 Статистическая модель объекта второго порядкаВ целом ход действий аналогичен случаю для линейной модели. Модель объекта второго порядка описывается уравнением вида y=ax2+bx+c.
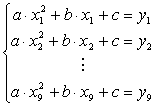
Для решения этой системы воспользуемся матричным методом наименьших квадратов.
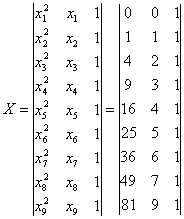
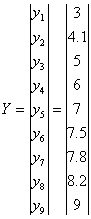
Составим матрицы входных и выходных сигналов:
Таким образом, получили матричное уравнение:
![]() ,
,
где  - матрица коэффициентов полинома второго порядка
- матрица коэффициентов полинома второго порядка
Находим значение главного определителя:
Δ=314160
Подставляя матрицу ![]() поочередно в первый, второй и третий столбец матрицы
поочередно в первый, второй и третий столбец матрицы ![]() , находим вспомогательные определители:
, находим вспомогательные определители:
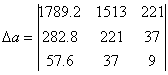
![]()
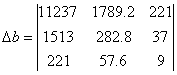
![]()
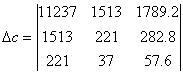
![]()
Находим коэффициенты полинома:
![]()
![]()
![]()
![]()
![]()
![]()
Таким образом, получили полином второго порядка:
![]()
Для качественной оценки полученного полинома вычислим аналитические значения функции и сравним их с экспериментальными данными. Результаты сведем в таблице 3.
Таблица 3 – Результаты расчета
| X | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 9 |
| Yзад. | 3 | 4,1 | 5 | 6 | 7 | 7,5 | 7,8 | 8,2 | 9 |
| Yаналит. | 3,155 | 4,265 | 5,261 | 6,143 | 6,991 | 7,565 | 8,105 | 8,531 | 9,041 |
| ΔY | 0,155 | 0,165 | 0,261 | 0,143 | -0,089 | 0,065 | 0,305 | 0,331 | 0,041 |
| ΔY2 | 0,024 | 0,027 | 0,068 | 0,020 | 0,008 | 0,004 | 0,093 | 0,110 | 0,002 |
![]()
Далее приведен проверочный расчет линейной аппроксимации на ЭВМ в программной среде MathCAD.
- векторы данных;
![]()
![]() - длина вектора
- длина вектора
![]()
![]() - задание степени
- задание степени
![]()
![]()
![]()
![]()
- переход к созданию матрицы Вандермонда и подматрицы для решения системы уравнений;
|
|
- матрица коэффициентов системы уравнений;
|
|
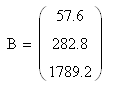
- вектор правых частей системы уравнений;
|
|
- решение системы уравнений;

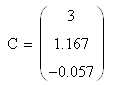 - коэффициент c;
- коэффициент c;
- коэффициент b;
- коэффициент a;

- вычисление значений аппроксимирующей функции;
Определяем сумму квадратов отклонений:
![]()
![]()
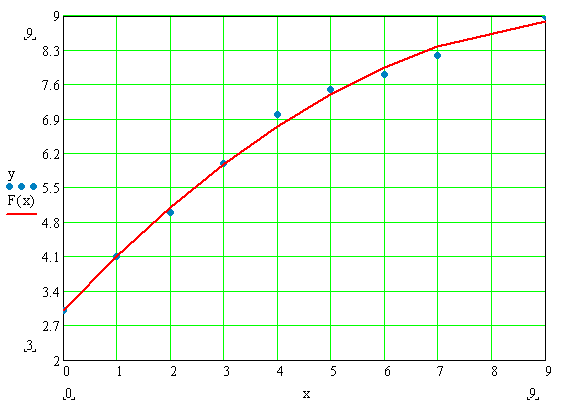
Рисунок 2 – График статической модели 2-го порядка
Похожие работы
... , является то, что в замкнутой системе все физические величины, представляющие воздействие одного звена на другое, связаны в единую замкнутую цепь. Автоматические системы регулирования должны обеспечивать: - устойчивость системы при любых режимных ситуациях объекта; - минимальное время регулирования; - минимальные динамические и статические отклонения регулируемой величины, не выходящие ...
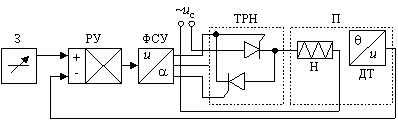
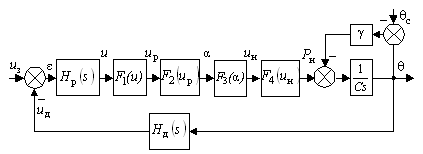
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...

... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
... системой: время наработки на отказ системы увеличилось на 2,73%. Вывод В ходе курсовой работы было произведено техническое обеспечение автоматической системы регулирования качества стабильного гидрогенизата. Были выбраны средства контроля и регулирования и обоснован их выбор. Был произведен расчет надежности контура регулирования, и предложена схема для резервирования самого ненадежного ...
0 комментариев