Навигация
Ломаная Эйлера и e-приближенное решение
38497
знаков
0
таблиц
12
изображений
2.5. Ломаная Эйлера и e-приближенное решение
Рассмотрим систему уравнений
![]() (2)
(2)
причем будем полагать, что эта система удовлетворяет условиям теоремы существования и единственности.
Совокупность n функций z1(t), ..., zn(t) называется e-приближенным решением системы (2) на отрезке А, если каждая из этих функций непрерывна, имеет кусочно-непрерывную производную ![]() и
и
![]()
во всех точках tÎK, кроме точек разрыва непрерывности этой производной.
Пусть задана начальная точка (t0, x10, …, хn0) и пусть функции fi(t, xi,...,хn) непрерывны по t в области G и удовлетворяют в этой области условию Липшица по переменным t, x1, х2, ..., хn. Можно показать, что в этом случае функции fi(t, x1,..., хn) будут непрерывны по совокупности переменных t, x1,..., хn в области G. Из непрерывности функций fi (t, x1,..., хn) в замкнутой области G следует их равномерная непрерывность. Таким образом, для любого e>0 найдется такое d>0, зависящее только от e, что при
![]()
будет справедливо неравенство
![]()
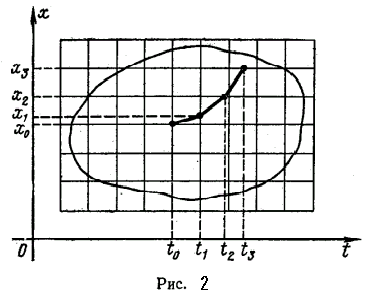
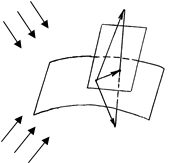
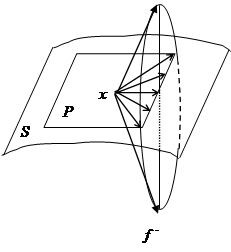
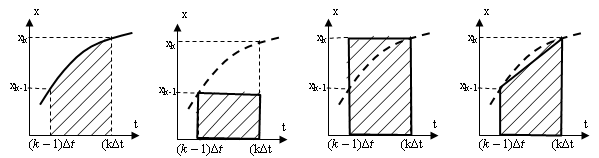
Построим e-приближенное решение системы (2). Для этого разобьем область G на кубы со сторонами, меньшими d (для случая n=1 построение проведено на рис. 2, в этом случае область разбивается на квадраты). Из точки (t, xlo, ..., хn0) проведем прямую
![]()
Эту прямую продолжим до пересечения с одной из сторон соответствующего куба. Обозначим точку пересечения (t1, x11,..., xn1). Из этой точки проведем прямую
![]()
которую продолжим до пересечения с одной из сторон куба; обозначим точку пересечения (t2, x12,..., xn2), через эту точку проводим новую прямую
![]()
и так далее.
В результате указанных действий получим ломаную xi=xi(t) (i=l, 2, ..., n), называемую ломаной Эйлера. Эта ломаная представляет собой непрерывную кусочно-линейную функцию. Ломаную Эйлера мы можем продолжить до границы области G.
Пусть xi(t) (i=l, 2, ..., n) — точное решение системы (2), удовлетворяющее начальным условиям. Обозначим через si(t) (i=1, 2, ..., n) e-приближенное решение системы (1) для тех же начальных условий. Тогда
![]()
Отсюда следует, что если |t–t0|<h, то
![]()
Таким образом, при e®0 решение xi(t) (i=1, 2, ..., n) равномерно сходится к решению si(t) (i=l, 2, ..., n) и ломаная Эйлера, исходящая из точки (t0, xi(t0)), равномерно сходится к точному решению. Это неравенство дает оценку погрешности при замене точного решения e-приближенным.
Полученные неравенства мы используем для выяснения важной зависимости решений дифференциальных уравнений от начальных условий и параметров уравнений.
2.6. Непрерывная зависимость решений от начальных условий и параметров
Пусть задана нормальная система дифференциальных уравнений (2), причем функции fi(t, xl ,..., хn) непрерывны по t и удовлетворяют условию Липшица по х1, ..., хn в некоторой области G.
Пусть далее x=x(t, t0, x0) — решение этой системы, удовлетворяющее начальным условиям. Положим, что это решение определено на отрезке |t-t0|≤h. Тогда для любого e>0 существует такое d(e, h)>0, что другое решение x=s(t, t0, z0), удовлетворяющее начальным условиям
![]()
где ||x0–z0||<d, будет определено на том же отрезке |t-t0|≤h и удовлетворяет неравенству
![]()
Рассмотрим теперь непрерывную зависимость решения системы дифференциальных уравнений от параметров. Пусть имеется система уравнений
![]()
Здесь (μ1,…, μs)=μ – вещественные параметры, а функции fi(t, x, μ) определены и непрерывны по совокупности переменных t, x1, …, xn, μ1, …, μs в некоторой области G n+s+1-мерного пространства и удовлетворяют условию Липшица по переменным x1, …, xn с постоянной L. Пусть далее x=x(t, μ’) – решение этой системы при значении параметров μ=μ’, удовлетворяющее начальным условиям x(t0, μ’)=x0 и определенное на отрезке.
Тогда справедлива теорема:
Пусть x(t, μ’’) — решение данной системы при значении параметров μ=μ’’, удовлетворяющее начальным условиям x(t0, μ’’)=x0. Тогда для любого e>0 существует такое d(e, h)>0, что если справедливо неравенство |μ’–μ’’|<d, то решение x(t, μ’’) определено на интервале |t—t0|≤h и удовлетворяет неравенству
|| x(t, μ’)–x(t, μ’’) ||<e.
Доказанные теоремы о непрерывной зависимости решений от начальных условий и параметров имеют принципиальное значение. Параметры дифференциальных уравнений систем автоматического регулирования (САР) задаются с некоторыми погрешностями. На основании доказанных выше теорем можно утверждать, что если погрешность в определении параметров дифференциальных уравнений САР незначительна, то решения этих уравнений с достаточной достоверностью описывают происходящие в САР процессы.
2.7. Линейные дифференциальные уравнения
2.7.1. Нормальная линейная система дифференциальных уравнений
Линейной системой дифференциальных уравнений называется такая система уравнений, в которую неизвестные функции и их производные могут входить только в первой степени.
Нормальная линейная система дифференциальных уравнений имеет вид

Введем в рассмотрение векторные функции

Тогда систему (1) можно переписать в виде
![]()
Теорема существования и единственности справедлива для линейной системы на любом отрезке [а1 ,b1]Ì(а, b), где (a, b) - интервал, на котором функции aik(t) и fi(t) непрерывны.
Похожие работы
... . , т.е. таких уравнений, у которых правая часть не является ненпрерывной по x функций рассмотрены в статье [5]. Теория систем автоматического управления, описываемых дифференциальными уравнениями с разрывными правыми частями рассматривается в книгах [13, 14, 15]. В работе С.В. Емельянова [13] излагается один из разделов теории автоматичесеого управления – теория систем с переменной структурой, ...
... популяции обязательно вырождаются, причем независимо от начального распределения особей по возрасту. В завершение рассмотрим пример. Одной из классических моделей динамики популяций является так называемая логистическая модель или модель Ферхюльста, которая описывается дифференциальным уравнением с начальным условием , где , см., например, [5, c. 14]. Если учитывать ограниченность времени жизни ...
... в руки инженера эффективную вычислительную процедуру решения задачи оптимизации управления, хорошо приспособленную к использованию ЭВМ. Этот метод мы рассмотрим более подробно. 2.4. Метод динамического программирования 2.4.1. Дискретная форма вариационной задачи Преодоление рассмотренных трудностей решения вариационной задачи лежит на путях использования эффективных вычислительных методов ...


... - α) / (2 + α)) yk - 1 + (α/ (2 + α)) (xk + xk - 1). (9) В лабораторной работе производится оценка ошибок цифрового моделирования для каждого из этих методов. Моделирование линейных замкнутых систем Нужно быть очень внимательным при выборе интервала дискретизации, когда моделируются замкнутые системы. В этих системах текущее значение входного процесса сравнивается со ...
0 комментариев