Введение. 2
§1. Актуальность темы. 2
§2. Обзор работ. 6
Глава II
Определения решения дифференциального уравнения с разрывной правой частью. 8
§1. Обоснование необходимости обобщения понятия
решения. 8
§2. Определения решения. 10
Глава III
Исследование устойчивости для дифференциальных
уравнений с разрывными правыми частями. 23
§1. Определение устойчивости. Метод функций Ляпунова. 23
§2. Некоторые сведения теории дифференциальных
уравнений с импульсным воздействием. 27
§3. Связь рассматриваемых теорий. 31
Заключение. 34
Литература. 35
Глава IВведение.
§1. Актуальность темы.
Актуальность данной темы в значительной степени обусловлена многочисленными приложениями теории дифференциальных уравнений с разрывными правыми частями.
Ряд процессов в механике, электротехнике и в других областях характеризуются тем, что правые части дифференциальных уравнений, которые описывают их динамику, претерпевают разрывы в зависимости от текущего состояния процесса. Стандартный пример такой динамической системы – механическая система с сухим трением, когда сила сопротивления может принимать одно из двух двух противоположных по знаку значений в зависимости от направления движения. Рассмотрим эту систему подробнее.
Механическая система с сухим трением.
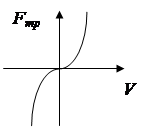
Как показано в [3] можно установить зависимость между работой, затраченной на преодоление сил трения и скоростью движения. Эта зависимость получается совершенно различной для случая движения груза массы m в жидкости и трения о какую-либо твердую поверхность. В первом случае (случай “жидкого трения”) работа существенно зависит от скорости и при уменьшении скорости уменьшается и может быть сделана как угодно малой. Во втором случае (случай “сухого трения”), наоборот, работа мало зависит от скорости, и как бы медленно ни двигали груз, необходимо затратить на его перемещение некоторую конечную и вполне определенную работу, т.е. сила трения даже при сколь угодно малой скорости имеет конечную величину. Кроме этого, учитывая, что сила трения всегда направлена в сторону, противоположную скорости, и, значит при переходе через нуль сила трения меняет знак на обратный, в случае “жидкого трения” получаем, что сила трения без скачка проходит через нуль и меняет при этом знак:
В случае же “сухого трения” при скорости, стремящейся к нулю, сила трения с двух сторон стремится к разным конечным пределам (в частности противоположным по знаку, но одинаковым по абсолютной величине), т.е. при нуле претерпевает разрыв:
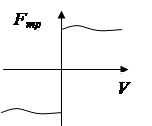
Т.о. математические модели механических систем с кулоновым трением, полученные в рамках механики систем абсолютно твердых тел, представляют собой дифференциальные уравнения, правые части которых являются функциями, разрывными относительно обобщенных скоростей (сила трения изменяется скачкообразно при изменении направления движения).
Ситуация, подобная вышеописанной, особенно часто возникает в системах автоматического управления: стремление повысить быстродействие системы, минимизировать энергетические затраты на управление, ограничить область возможных изменений регулируемых параметров и т.п. приводит к управляющим воздействиям в виде разрывных функций. В частности, такими системами автоматического управления являются системы с переменной стуктурой и со скользящими режимами.
Системы с переменной структурой и со скользящим режимом.
Исследование этих систем в большинстве случаев осуществляется на основе развитого в работе [3] метода фазового пространства. Согласно этому методу, состояние динамической системы ![]() –го порядка в любой момент времени полностью определяется значениями
–го порядка в любой момент времени полностью определяется значениями ![]() координат. Значения этих координат задают некоторую точку в
координат. Значения этих координат задают некоторую точку в ![]() –мерном пространстве, по осям которого отложены координаты системы. Т.о., каждому новому состоянию системы соответствуют все новые и новые точки пространства и изменению состояний системы можно соподчинить движение некоторой точки, которая называется изображающей точкой, а пространство – фазовым пространством. При движении системы ее координаты изменяются. И изображающая точка описывает некоторую кривую (выражающую для данного движения зависимость скорости от координат), которая называется фазовой траекторией. По виду этих траекторий можно судить о свойствах рассматриваемой динамической системы, и, более того, изменять их, деформируя фазовые траектории при соответствующем выборе
управляющих воздействий. Движение изображающей точки характеризуется вектором фазовой скорости, который направлен по касательной к траектории в сторону движения.
–мерном пространстве, по осям которого отложены координаты системы. Т.о., каждому новому состоянию системы соответствуют все новые и новые точки пространства и изменению состояний системы можно соподчинить движение некоторой точки, которая называется изображающей точкой, а пространство – фазовым пространством. При движении системы ее координаты изменяются. И изображающая точка описывает некоторую кривую (выражающую для данного движения зависимость скорости от координат), которая называется фазовой траекторией. По виду этих траекторий можно судить о свойствах рассматриваемой динамической системы, и, более того, изменять их, деформируя фазовые траектории при соответствующем выборе
управляющих воздействий. Движение изображающей точки характеризуется вектором фазовой скорости, который направлен по касательной к траектории в сторону движения.
Определение систем с переменной структурой дано в работе [13]. Под системами с переменной структурой авторы понимают системы, в которых связи между функциональными элементами меняются тем или иным образом, в отличие от систем с фиксированной структурой, в которых совокупность функциональных элементов и характер связей между ними остаются неизменными.
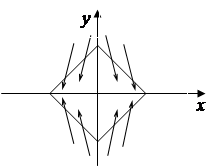
Одним из режимов работы таких систем является скользящий режим, характеризуемый бесконечной частотой переключения функции управления. Скользящий режим возникает, если в окрестности поверхности, на которой функция управления претерпевает разрывы, фазовые траектории направлены навстречу друг другу
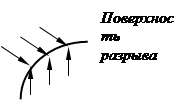
После попадания на поверхность разрыва изображающая точка не может в течение любого даже сколь угодно малого, но конечного интервала времени двигаться по любой из траекторий, примыкающих к этой поверхности (при любом смещении всегда возникает движение, возвращающее изображающую точку на поверхность разрыва).
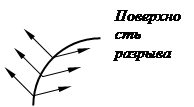
В [7] рассматривается еще случай, когда решение наоборот не может попасть на соответствующий участок поверхности разрыва (при возрастании времени):
Скользящие режимы обладают рядом привлекательных свойств с т.з. построения систем автоматического управления (часто скользящие режимы специально вводят в системы). Одна из особенностей, связанная с независимостью их от характеристик управляемого объекта и возможностью наделить их желаемыми свойствами, и обуславливает широкое применение скользящих движений.
Т.о., существование теории релейных систем, систем переменной структуры, реализация законов оптимального управления, механики, электротехники приводят к необходимости изучения общей теории диф. уравн. с разрывными правыми частями, для которых в общем случае неприемлемы методы классической теории дифференциальных уравнений.
§2. Обзор работ по теории дифференциальных уравнений с разрывными правыми частями.
Различным вопросам этой теории посвящены отдельные параграфы и главы в книгах [3,4,7,9], а также большое число журнальных статей.
Систематическое изложение этой теории имеется в статьях А.Ф. Филиппова. В [16] Филиппов рассмотрел диф. уравн. с однозначными разрывными правыми частями, ввел понятие решения и доказал основные теоремы качественной теории.
Различные направления исследования релейных диф. уравн. ![]() , т.е. таких уравнений, у которых правая часть не является ненпрерывной по x функций рассмотрены в статье [5].
, т.е. таких уравнений, у которых правая часть не является ненпрерывной по x функций рассмотрены в статье [5].
Теория систем автоматического управления, описываемых дифференциальными уравнениями с разрывными правыми частями рассматривается в книгах [13, 14, 15]. В работе С.В. Емельянова [13] излагается один из разделов теории автоматичесеого управления – теория систем с переменной структурой, принадлежащих к классу нелинейных систем автоматического регулирования, в которых широко используются скользящие режимы. Скользящие режимы релейных систем изучались Ю.И Неймарком [10], Ю.И. Алимовым [2] и др. Но появление систем с переменной структурой породило интерес к теории скользящих режимов не только в релейных системах общего вида [14, 15]. Содержание последних книг составляют проблемы, связанные с исследованием систем с разрывными управляющими воздействиями, в [14] приводится математический аппарат для исследования разрывных динамических систем, которые не рассматриваются в классической теории диф. уравнений. Обзор и основные направления теории диф. уравнений с разрвными правыми частями приводятся в книге [17], которая явилась основной при написании дипломной работы.
Во всех вышеперечисленных работах теория разрывных систем основывается на теории дифференциальных включений. Нами было сделано предположение, что эти системы можно свести к системам дифференциальных уравнений с импульсным воздействием, теория которых изложена в [12]. Для этого потребуется дать определения решения, устойчивости решения разрывной системы в смысле системы с импульсным воздействием, сформулировать теорему об устойчивости нулевого решения.
Глава II
Определения решения дифференциального уравнения с разрывной правой частью.
Здесь из лагаются различные определения решений дифференциальных уравнений с разрывными правыми частями, устанавливается связь таких уравнений с дифференциальными включениями, указываются условия их применимости.
§1. Обоснование необходимости обобщения понятия
решения дифференциального уравнения.
Определение1. Решением дифференциального уравненияПример 1.
![]()
![]()
При ![]()
![]()
![]() =-1 и решение выражается формулой
=-1 и решение выражается формулой ![]() ;
;
 при
при Исходя из требования непрерывности решения при ![]() :
:
x(0)=![]() ,
,
![]() . Поэтому решение выражается формулой
. Поэтому решение выражается формулой ![]() . При
. При ![]() производной
производной ![]() не существует.
не существует.
Пример 2.
![]()
![]()
При ![]()
![]() 3, решение
3, решение ![]() ,
,
при ![]()
![]() , решение
, решение ![]() :
:
 x
x
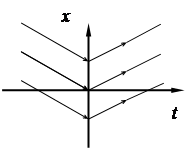
При возрастании ![]() каждое решение доходит до прямой
каждое решение доходит до прямой ![]() 0. Поле направлений не позволяет решению сойти с прямой
0. Поле направлений не позволяет решению сойти с прямой ![]() 0 ни вверх, ни вниз. Если же продолжить решение по этой прямой, то получаемая функция
0 ни вверх, ни вниз. Если же продолжить решение по этой прямой, то получаемая функция ![]() не удовлетворяет уравнению в обычном смысле, т.к. для нее
не удовлетворяет уравнению в обычном смысле, т.к. для нее![]() , а правая часть уравнения при
, а правая часть уравнения при ![]() равна 1-sign 0=1
равна 1-sign 0=1![]() 0.
0.
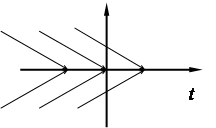
Кроме этого, уравнение с непрерывной правой частью равносильно интегральному уравнению
В случае, когда f(t,x) разрывна по t и непрерывна по x (пример 1), решением уравнения можно назвать функции, удовлетворяющие интегральному уравнению. В этом случае, решения с одной стороны от S подходят к S, а с другой стороны сходят с S (траектории “прошивают” поверхность):

S
Решение x(t) попадающее при ![]() на поверхность разрыва S, продолжается однозначно на значения
на поверхность разрыва S, продолжается однозначно на значения ![]() и близкие к
и близкие к ![]() ; пересекая S решение удовлетворяет уравнению всюду, кроме точки пересечения, в которой решение не имеет производной (в первом примере S – это прямая t=0).
; пересекая S решение удовлетворяет уравнению всюду, кроме точки пересечения, в которой решение не имеет производной (в первом примере S – это прямая t=0).
В другом случае, когда с обеих сторон поверхности разрыва S решения приближаются к S (траектории “стыкуются” – скользящий режим), это определение решения непригодно, т.к. ничего не говорит о том, как продолжится решение, попавшее на S (пример 2).
Необходимо поэтому было дать такое определение решения, которое охватило бы эти два основных случая и формулировалось бы независимо от расположения линий и поверхностей разрыва.
§2. Определения решения.
Рассмотрим уравнение или систему в векторной записи
![]() , (1)
, (1)
с кусочно-непрерывной функцией f в области G;![]() ,
, ![]() , M – множество (меры нуль) точек разрыва функции f.
, M – множество (меры нуль) точек разрыва функции f.
Большинство известных определений решения уравнения (1) могут быть изложены следующим образом. Для каждой точки ![]() области G указывается множество
области G указывается множество ![]() в n-мерном пространстве. Если в точке (t,x) функция f непрерывна, то множество
в n-мерном пространстве. Если в точке (t,x) функция f непрерывна, то множество ![]() состоит из одной точки, совпадающей со значением функции f в этой точке. Если же
состоит из одной точки, совпадающей со значением функции f в этой точке. Если же ![]() -точка разрыва функции f, то множество
-точка разрыва функции f, то множество ![]() задается тем или иным способом.
задается тем или иным способом.
Другими словами, решение дифференциального уравнения (1) определяется как функция, у которой производная ![]() может принимать любые значения из некоторого множества
может принимать любые значения из некоторого множества ![]() .
.
Иногда (2) называют диф. уравнением с многозначной правой частью. Функцию ![]() называют многозначной функцией, подчеркивая, что значение
называют многозначной функцией, подчеркивая, что значение![]() - множество. Если для всех (t, x) множество
- множество. Если для всех (t, x) множество![]() состоит из единственной точки, то (2) – обычное диф. уравнение. Функция
состоит из единственной точки, то (2) – обычное диф. уравнение. Функция ![]() называется однозначной в точке
называется однозначной в точке ![]() , если множество F
, если множество F![]() состоит из единственной точки.
состоит из единственной точки.
Одним из наиболее популярных определений решения разрывной системы является определение А.Ф. Филиппова.
А. Выпуклое доопределение.
Применимо, в частности, к системам с малым запаздыванием того или иного рода, а также к некоторым системам с сухим трением.
Для каждой точки ![]() пусть
пусть ![]() - наименьшее выпуклое замкнутое множество, содержащее все предельные значения вектор-функции
- наименьшее выпуклое замкнутое множество, содержащее все предельные значения вектор-функции![]() , когда
, когда ![]()
![]() Решением уравнения (1) называется решение включения (2) с только что построенным
Решением уравнения (1) называется решение включения (2) с только что построенным ![]() . Т.к.
. Т.к. ![]() - множество меры нуль, то при почти всех
- множество меры нуль, то при почти всех ![]() мера сечения множества
мера сечения множества ![]() плоскостью
плоскостью ![]() равна нулю. При таких
равна нулю. При таких ![]() множество
множество ![]() определено для всех
определено для всех ![]()
![]() . В точках непрерывности функции
. В точках непрерывности функции ![]() множество
множество ![]() состоит из одной точки
состоит из одной точки ![]() и решение удовлетворяет
уравнению (1) в обычном смысле. Если же точка
и решение удовлетворяет
уравнению (1) в обычном смысле. Если же точка ![]()
![]() лежит на границах сечений двух или нескольких областей
лежит на границах сечений двух или нескольких областей ![]() , …,
, …, ![]() плоскостью
плоскостью ![]() , то множество
, то множество ![]() есть отрезок, выпуклый многоугольник
или многогранник с вершинами
есть отрезок, выпуклый многоугольник
или многогранник с вершинами ![]()
![]() ,
, ![]() , где
, где
![]()
![]() =
= ![]()
![]() .
.
Все точки ![]()
![]() (
(![]() = 1, … ,
= 1, … , ![]() содержатся в
содержатся в ![]() , но не обязательно, чтобы все они являлись вершинами.
, но не обязательно, чтобы все они являлись вершинами.
Определение 3.
Вектор-функция ![]() , определенная на интервале
, определенная на интервале ![]() называется решением уравнения (1), если она абсолютно непрерывна и если при почти всех
называется решением уравнения (1), если она абсолютно непрерывна и если при почти всех ![]() для любого
для любого ![]() вектор
вектор ![]() принадлежит наименьшему выпуклому замкнутому множеству (
принадлежит наименьшему выпуклому замкнутому множеству (![]() -мерного пространства), содержащему все значения вектор-функции
-мерного пространства), содержащему все значения вектор-функции ![]() , когда
, когда ![]() пробегает почти всю
пробегает почти всю ![]() -окрестность точки
-окрестность точки ![]() в пространстве X (при фиксированном
в пространстве X (при фиксированном ![]() ), т.е. всю окрестность, кроме множества мера нуль.
), т.е. всю окрестность, кроме множества мера нуль.
Такое определение дает однозначное продолжение решения по поверхности разрыва.
Рассмотрим случай, когда функция ![]() разрывна на гладкой поверхности
разрывна на гладкой поверхности ![]() , задаваемой уравнением
, задаваемой уравнением ![]() . Поверхность S делит свою окрестность в пространстве на области
. Поверхность S делит свою окрестность в пространстве на области ![]() и
и ![]() . Пусть при
. Пусть при ![]() и приближении
и приближении ![]() к
к ![]() из областей
из областей ![]() и
и ![]() функция имеет предельные значения
функция имеет предельные значения
![]()
![]()
Тогда множество ![]() , о котором говорится в доопределении А, есть отрезок, соединяющий концы векторов
, о котором говорится в доопределении А, есть отрезок, соединяющий концы векторов ![]() и
и ![]() , проведенных из точки
, проведенных из точки ![]() .
.
aЕсли этот отрезок при ![]() лежит по одну сторону от плоскости
лежит по одну сторону от плоскости ![]() , касательной к поверхности
, касательной к поверхности ![]() в точке, то решения при этих
в точке, то решения при этих ![]() переходят с одной стороны поверхности
переходят с одной стороны поверхности ![]() на другую:
на другую:
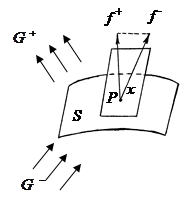
Рис. 1.
aЕсли этот отрезок пересекается с плоскостью ![]() , то точка пересечения является концом вектора
, то точка пересечения является концом вектора ![]() , определяющего скорость движения
, определяющего скорость движения
![]() (3)
(3)
по поверхности ![]() в пространстве
в пространстве ![]() :
:
|
|
|
|
|
|
|
|
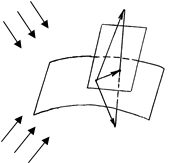
Рис. 2.
Причем касательный вектор к S ![]() , следовательно
, следовательно ![]() . Это значит, что функция
. Это значит, что функция ![]() , удовлетворяющая уравнению (3) в силу доопределения А считается решением уравнения (1). Разумеется, непрерывная функция
, удовлетворяющая уравнению (3) в силу доопределения А считается решением уравнения (1). Разумеется, непрерывная функция ![]() , которая на данной части рассматриваемого интервала времени проходит в области
, которая на данной части рассматриваемого интервала времени проходит в области ![]() (или в
(или в ![]() ) и там удовлетворяет уравнению (1), а на оставшейся части проходит по поверхности
) и там удовлетворяет уравнению (1), а на оставшейся части проходит по поверхности ![]() и удовлетворяет уравнению (3), также считается решением уравнения (1) в смысле доопределения А.
и удовлетворяет уравнению (3), также считается решением уравнения (1) в смысле доопределения А.
В уравнение (3) ![]() ,
,
![]() , (
, ( ![]() ),
),
![]() - проекции векторов
- проекции векторов ![]() и
и ![]() на нормаль к поверхности
на нормаль к поверхности ![]() в точке
в точке ![]() (нормаль направлена в сторону области
(нормаль направлена в сторону области ![]() ).
).
Вместе с тем множество F(t, x) можно было определить иначе. В качестве) возьмем произвольное ограниченное выпуклое множество, содержащее отрезок J:
|
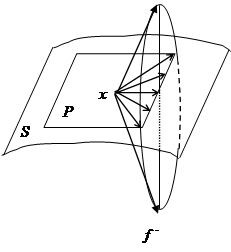
Рис. 3.
При этом на касательной плоскости появляются векторы, отличные от ![]() ; это приводит к тому, что кроме решения Филиппова появляются и другие решения.
; это приводит к тому, что кроме решения Филиппова появляются и другие решения.
Т.о. определение (А) А.Ф. Филиппова соответствует минимальному возможному определению множества F(t, x) среди всех допустимых. Это удобно в том отношении, что для решения в смысле Филиппова чаще, чем в других случаях, имеет место единственность решения.
aЕсли весь отрезок с концами ![]() и
и ![]() лежит на плоскости P, то скорость движения
лежит на плоскости P, то скорость движения ![]() по поверхности разрыва S определяется неоднозначно.
по поверхности разрыва S определяется неоднозначно.
При ![]() ,
, ![]() имеет место скользящий режим, о котором шла речь во введение. Пусть уравнение идеального скольжения имеет вид (3). Вычисляя
имеет место скользящий режим, о котором шла речь во введение. Пусть уравнение идеального скольжения имеет вид (3). Вычисляя ![]() для
для ![]() из условия
из условия ![]() , находим уравнение
, находим уравнение
![]() ,
(4)
,
(4)
с помощью котрого и доопределяется движение в скользящем режиме (начальные условия для (4) выбираются на поверхности разрыва, т. е. S(x(0))=0).
Пример 3.
Решить систему
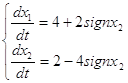
Всякое решение этой системы рано или поздно попадает на прямую ![]() и уже не может сойти с нее. Если точка М лежит на оси
и уже не может сойти с нее. Если точка М лежит на оси ![]() , то в окрестности этой точки вектор
, то в окрестности этой точки вектор ![]() , компоненты которого - правые части системы, принимает два значения:
, компоненты которого - правые части системы, принимает два значения: ![]() при
при ![]() ,
, ![]() (6,-2) при
(6,-2) при ![]() . Отложим из точки М эти два вектора и соединим их концы отрезком АВ:
. Отложим из точки М эти два вектора и соединим их концы отрезком АВ:
Этот отрезок и будет искомым множеством, в котором, согласно определению 3, лежит конец вектора ![]() для точки М. В то же время вектор скорости
для точки М. В то же время вектор скорости ![]() должен лежать на оси
должен лежать на оси ![]() . Т.к. решение не может сойти с нее ни вверх, ни вниз, следовательно, конец вектора лежит в точке пересечения отрезка АВ и оси
. Т.к. решение не может сойти с нее ни вверх, ни вниз, следовательно, конец вектора лежит в точке пересечения отрезка АВ и оси ![]() . Т.о., этот вектор определяется однозначно. Легко подсчитать, что
. Т.о., этот вектор определяется однозначно. Легко подсчитать, что ![]()
Т.о., связь теорий уравнений (1) с разрывной правой частью с теорией диф. Включений (2) очевидна. Имея уравнение (1) с разрывной f(t, x) необходимо заменить значение ![]() в точке разрыва
в точке разрыва ![]() некоторым множеством. Это множество должно быть ограниченным, выпуклым, замкнутым. Кроме этого оно должно включать все предельные значения
некоторым множеством. Это множество должно быть ограниченным, выпуклым, замкнутым. Кроме этого оно должно включать все предельные значения ![]() при (t, x)
при (t, x)![]() . После такой замены (для любой точки разрыва) вместо (1) получаем диф. включение (2), в котором многозначная функция
. После такой замены (для любой точки разрыва) вместо (1) получаем диф. включение (2), в котором многозначная функция![]() удовлетворяет перечисленным требованиям.
удовлетворяет перечисленным требованиям.
Однако, в некоторых случаях множество ![]() в (2) в точках разрыва функции
в (2) в точках разрыва функции ![]() нельзя определить, зная только значения функции
нельзя определить, зная только значения функции ![]() в точках ее непрерывности.
в точках ее непрерывности.
Пример 4.
В механической системе с сухим трением:
![]() ,
,
![]() масса тела,
масса тела, ![]() его отклонение,
его отклонение, ![]() упругая сила,
упругая сила, ![]() сила трения, являющаяся нечетной и разрывной при
сила трения, являющаяся нечетной и разрывной при ![]() =0 функцией скорости
=0 функцией скорости ![]() ,
, ![]() -внешняя сила. Трение покоя
-внешняя сила. Трение покоя ![]() может принимать любые значения между [d1] своим наибольшим и наименьшим значениями
может принимать любые значения между [d1] своим наибольшим и наименьшим значениями ![]() и -
и -![]() . Если
. Если ![]() =
=![]()
![]() , то применимо доопределение
, то применимо доопределение ![]() . Если же
. Если же ![]() >
>![]()
![]() , то движение с нулевой начальной скоростью зависит не только от значений функции
в областях ее непрерывности, но и от величины
, то движение с нулевой начальной скоростью зависит не только от значений функции
в областях ее непрерывности, но и от величины ![]() . Доопределение А тогда неприменимо. В обоих случаях систему можно записать в виде включения (2). Множество
. Доопределение А тогда неприменимо. В обоих случаях систему можно записать в виде включения (2). Множество ![]() при
при ![]() – точка, а при v=0 – отрезок, длина которого зависит от
– точка, а при v=0 – отрезок, длина которого зависит от ![]() .
.
Следовательно, множество ![]() не всегда определяется предельными значениями функции
не всегда определяется предельными значениями функции ![]() из (1), и в общем случае это множество надо задавать, используя какие-то сведения о рассматриваемой системе.
из (1), и в общем случае это множество надо задавать, используя какие-то сведения о рассматриваемой системе.
Необходимость охватить такие системы приводит к следующему способу построения множества F(t,x).
Рассмотрим систему
![]() , (6)
, (6)
где ![]() , вектор-функция
, вектор-функция ![]() непрерывна по совокупности аргументов, а скалярные или векторные функции
непрерывна по совокупности аргументов, а скалярные или векторные функции ![]() разрывны соответсвенно на множествах
разрывны соответсвенно на множествах ![]() , i=1,…,r, которые могут иметь общие точки и даже совпадать. В каждой точке (t, x) разрыва
функции
, i=1,…,r, которые могут иметь общие точки и даже совпадать. В каждой точке (t, x) разрыва
функции ![]() задается замкнутое множество
задается замкнутое множество ![]() - множество возможных значений аргумента
- множество возможных значений аргумента ![]() функции
функции ![]() . Предполагается, что при
. Предполагается, что при ![]() аргументы
аргументы ![]() и
и ![]() могут независимо друг от друга пробегать соответственно множества
могут независимо друг от друга пробегать соответственно множества ![]() и
и ![]() . Обычно, это условие выполнено, если функции
. Обычно, это условие выполнено, если функции ![]() и
и ![]() описывают различные независимые составные части (блоки) физической системы. В точках, где функция
описывают различные независимые составные части (блоки) физической системы. В точках, где функция ![]() непрерывна, множество
непрерывна, множество ![]() состоит из одной точки
состоит из одной точки ![]() . В точках, разрыва функции
. В точках, разрыва функции ![]() необходимо, чтобы множество
необходимо, чтобы множество ![]() содержало все точки, предельные для точек любой из последовательностей вида
содержало все точки, предельные для точек любой из последовательностей вида ![]() , где
, где ![]() k=1,2,…(или
k=1,2,…(или ![]() , где
, где ![]()
![]() k=1,2,…). Потребуем, чтобы множество
k=1,2,…). Потребуем, чтобы множество ![]() было выпуклым (если
было выпуклым (если ![]() - скалярная функция, то
- скалярная функция, то ![]() - отрезок или точка).
- отрезок или точка).
Пусть
![]() (7) множество значений функции
(7) множество значений функции ![]() , когда t, x постоянны, а
, когда t, x постоянны, а ![]() независимо друг от друга пробегают соответственно множества
независимо друг от друга пробегают соответственно множества ![]() .
.
Определение 4.
Решением диф. уравн. (6) называют решение диф. включения (2), где ![]() (или
(или ![]() , где
, где ![]() - наименьшее выпуклое множество, содержащее множество
- наименьшее выпуклое множество, содержащее множество ![]() ).
).
Частными случаями такого способа построения функции F(t,x) является как доопределение А, так и изложенные ниже Б и В.
Б. Доопределение методом эквивалентного уравнения
(управления).
Применяется к уравнениям вида (6), где f – непрерывная вектор-функция, ![]() - скалярная функция, разрывная только на гладкой поверхности
- скалярная функция, разрывная только на гладкой поверхности ![]() 1,…, r. Допускоются пересечения и даже совпадения этих поверхностей.
1,…, r. Допускоются пересечения и даже совпадения этих поверхностей.
В точках, принадлежащих одной или одновременно нескольким поверхноостям, например ![]() ,…, Sm (
,…, Sm (![]() , полагают (если решение не может сойти тут же с такой поверхности или с пересечения этих поверхностей)
, полагают (если решение не может сойти тут же с такой поверхности или с пересечения этих поверхностей)
![]() , (8)
, (8)
где эквивалентные управления ![]() определяются так, чтобы вектор
определяются так, чтобы вектор ![]() в (8) касался поверхностей
в (8) касался поверхностей ![]() ,…, Sm и чтобы значение
,…, Sm и чтобы значение ![]() содержалось в отрезке с концами
содержалось в отрезке с концами ![]() , где
, где ![]() – предельные значения функции
– предельные значения функции ![]() с обеих сторон поверхности
с обеих сторон поверхности ![]() , i=1,…, m. Т.о., функции
, i=1,…, m. Т.о., функции ![]() определяются из системы уравнений
определяются из системы уравнений
![]() .
.
Определение 5.
Решением (6) называется абсолютно непрерывная вектор-функция, которая вне поверхностей ![]() удовлетворяет уравнению (6), а на этих поверхностях и их пересечениях – уравнениям вида (8) (при почти всех t ).
удовлетворяет уравнению (6), а на этих поверхностях и их пересечениях – уравнениям вида (8) (при почти всех t ).
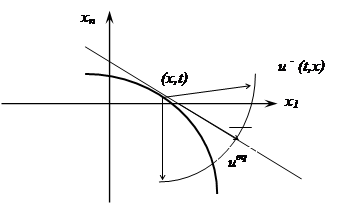
Например, в случае ![]() конец вектора
конец вектора ![]() лежит на пересечении касательной к S в точке x с дугой abc , которую пробегает конец вектора f(t,x,u), когда u изменяется от
лежит на пересечении касательной к S в точке x с дугой abc , которую пробегает конец вектора f(t,x,u), когда u изменяется от ![]() до
до ![]() :
:

Рис. 4.
С геометрической точки зрения, метод эквивалентного управления предполаглет замену разрывного управления на границе разрыва, где оно не определено, ненпрерывным управлением, которое направляет вектор скорости в пространстве состояний системы вдоль пересечения поверхностей разрыва. Например, в системе c одной поверхностью разрыва ![]() для нахождения этого вектора в некоторой точке (t, x) нужно построить годограф f(t, x, u), изменяя скалярное управление от
для нахождения этого вектора в некоторой точке (t, x) нужно построить годограф f(t, x, u), изменяя скалярное управление от ![]() , и найти точку его пересечения с касательной плоскостью. Точка пересечения определяет
, и найти точку его пересечения с касательной плоскостью. Точка пересечения определяет ![]() диф. уравнения (8) (для r=1 (8) примет вид
диф. уравнения (8) (для r=1 (8) примет вид ![]()
![]() ).
).
|
Уравнение (6), доопределенное указаным образом, сводится к диф. включению ![]() . Множество
. Множество ![]() определено в (7), где
определено в (7), где ![]() – отрезок с концами
– отрезок с концами ![]() и
и ![]() ; для тех
; для тех ![]() , которые непрерывны в точке (t,x),
, которые непрерывны в точке (t,x), ![]() является точкой
является точкой ![]() .
.
Правая часть (8) есть вектор с концом в точке пересечения множества ![]() с касательной к пересечению поверхностей
с касательной к пересечению поверхностей ![]() ,…, Sm. На рис. 4 множество
,…, Sm. На рис. 4 множество ![]() – дуга abc, а правая часть (8) – вектор xb.
– дуга abc, а правая часть (8) – вектор xb.
Доопределение А было обосновано лишь для скалярного случая (u - скалярная функция) и лишь с помощью предельных переходов для частных случаев неидеальностей, доопределение Б применимо и в случае векторной разрывной динамической системы (т.е. управляющее воздействия приложены к различным точкам объекта и управление u является векторной величиной ), описываемой уравнениями
![]() (9)
(9)
x,f - n-мерные векторы-столбцы, ![]() - координаты системы,
- координаты системы, ![]() - непрерывные функции по всем аргументам (
- непрерывные функции по всем аргументам (![]() ), u - m-мерный вектор-столбец, каждая компонента которого
), u - m-мерный вектор-столбец, каждая компонента которого ![]() претерпевает разрывы на поверхности
претерпевает разрывы на поверхности ![]() :
:
i=1, …, m, ![]() ,
, ![]() (
(![]() ),
),![]() - непрерывные функции. Если положить
- непрерывные функции. Если положить ![]() , то
, то ![]() .
.
Для доопределения уравнений идеального скольжения используют метод эквивалентного управления [7]: в уравнение модели (9) вместо ![]() подставить
подставить ![]() , которые являются решениями уравнения
, которые являются решениями уравнения
![]() ,
,
где строки матрицы G={![]() } размерности
} размерности ![]() являются градиентами функций
являются градиентами функций ![]() . Очевидно, что при начальном значении
. Очевидно, что при начальном значении ![]() в силу условия (10) дальнейшее движение будет происходить по траекториям, лежащим на многообразии S(x)=0.
в силу условия (10) дальнейшее движение будет происходить по траекториям, лежащим на многообразии S(x)=0.
Пример 5.
Получить уравнение скольжения для разрывной системы:

В любой точке прямой разрыва S=0 (т.е. при ![]() ) выполняются условия возникновения скользящего режима
) выполняются условия возникновения скользящего режима ![]() , а уравнение метода эквивалентного управления (10) имеет вид:
, а уравнение метода эквивалентного управления (10) имеет вид:
 .
.
Найдем эквивалентное управление из уравнения ![]() , откуда
, откуда ![]() , подставим его в первое уравнение системы (учитывая
, подставим его в первое уравнение системы (учитывая ![]() ):
):
![]()
Замечание.
Метод Филиппова, примененный к рассматриваемой системе, согласно (4) приводит к уравнению ![]() движения по прямой S=0.
движения по прямой S=0.
В. Общее дополнение.
Оно применяется к уравнениям вида (6), где функция f непрерывна по t,x, ![]() , а каждая из функций
, а каждая из функций ![]() разрывна только на поверхности
разрывна только на поверхности ![]() , i=1,…, r.
, i=1,…, r.
Пусть ![]() и
и ![]() те же, что в Б, а
те же, что в Б, а ![]() – наименьшее выпуклое замкнутое множество, содержащее множество
– наименьшее выпуклое замкнутое множество, содержащее множество ![]() .
.
Определение 6.
Решением уравнения (6) называется решение включения
![]() (10)
(10)
Движение по поверхности разрыва S (S(x)=0) может происходить только со скоростью ![]() , где K(t,x)– пересечение множества с плоскостью, касательной к S в точке x. На рис. 4 множество
, где K(t,x)– пересечение множества с плоскостью, касательной к S в точке x. На рис. 4 множество ![]() - наименьшее выпуклое замкнутое множество, содержащее дугу abc. Если эта дуга лежит в одной плоскости, то множество
- наименьшее выпуклое замкнутое множество, содержащее дугу abc. Если эта дуга лежит в одной плоскости, то множество ![]() – сегмент между этой дугой и ее хордой, заштрихованный на рисунке, а K(t,x) – отрезок, являющийся пересечением этого сегмента с касательной к S в точке x.
– сегмент между этой дугой и ее хордой, заштрихованный на рисунке, а K(t,x) – отрезок, являющийся пересечением этого сегмента с касательной к S в точке x.
Если функция f нелинейна по ![]() , то, вообще говоря,
множество K(t, x) содержит более одной точки и скорость движения по S определяется неоднозначно.
, то, вообще говоря,
множество K(t, x) содержит более одной точки и скорость движения по S определяется неоднозначно.
Сравнение определений.
Сравним определения А, Б, В.
Уравнение (6) можно записать в виде (1) и применить к нему определение А. Т.к. при этом множнство ![]() содержит множества
содержит множества ![]() и
и ![]() из (2) и (7), то каждое решение в смысле определения А и каждое решение в смысле определения Б являются так же решением в смысле определения В. Обратно, вообще говоря, неверно: на рис. 4 множество F – хорда ac,
из (2) и (7), то каждое решение в смысле определения А и каждое решение в смысле определения Б являются так же решением в смысле определения В. Обратно, вообще говоря, неверно: на рис. 4 множество F – хорда ac, ![]() - дуга abc,
- дуга abc, ![]() - заштрихованный сегмент.
- заштрихованный сегмент.
Если же функция f линейна по ![]() , то
, то ![]() и определения Б и В совпадают. Если, кроме того, все поверхности
и определения Б и В совпадают. Если, кроме того, все поверхности ![]() различны и в точках их пересечения векторы нормалей линейно независимы, то множества F,
различны и в точках их пересечения векторы нормалей линейно независимы, то множества F, ![]() и
и ![]() совпадают, тогда совпадают и все три определения А, Б, В.
совпадают, тогда совпадают и все три определения А, Б, В.
Глава III
Исследование устойчивости для дифференциальных
уравнений с разрывными правыми частями.
§1.Определение устойчивости. Метод функций Ляпунова.
Теория устойчивости создана в 90-х годах 19 в. А.М. Ляпуновым (в 1892 г. появилась знаменитая докторская диссертация “Общая задача об устойчивости движения”). Эта теория нашла широкое применение не только в математике, механике, технике, но и в химии, термодинамике, синергетике. Очень бльшую роль играет решение прроблемы устойчивости движения в небесной механике. На теории Ляпунова базируется современная наука о полете искусственных спутников Земли.
Определение устойчивости и асимптотической устойчивости решений диф. уравнений с непрерывной правой частью приводится, например, в [4]. Теория устойчивости движения занимается исследованием влияния возмущающих факторов на движение матариальной системы (под возмущающим фвкторами понимают силы, не учитываемые при написании движения вследствие их малости по сравнению с основными силами); устойчивость по Ляпунову – это близость законов изменения состояния во времени для невозмущенного и возмущенного движений. Сводя вопрос устойчивости невозмущенного движения к вопросу устойчивости положения равновесия, А.М. Ляпунов связывал факт устойчивости или неустойчивости с наличием функции V(t, x) – функции Ляпунова, производная которой по времени, взятая согласно системе диф. уравнений, обладает определенными свойствами. Метод функций Ляпунова является одним из наиболее эффективных методов исследования систем автоматического управления. Значение этого метода далеко не исчкрпывается возможностью установления факта устойчивости или неустойчивости исследуемой системы. Но в данной работе ограничимся только этим.
Метод функций Ляпунова переносится и на случай разрывной правой части системы
![]() .
(1)
.
(1)
Как было показано в первой главе, уравнения (1) сводятся к диф. включениям
![]() (2)
(2)
Для диф. включений имеются два типа устойчивости: устойчивость и слабая устойчивость.
Определение 1.
Решение ![]() дифференциального включения (2) называется устойчивым (соответственно слабо устойчивым), если для каждого
дифференциального включения (2) называется устойчивым (соответственно слабо устойчивым), если для каждого ![]() существует такое
существует такое ![]() , что для каждого такого
, что для каждого такого ![]() , что
, что ![]() , каждое решение (соответственно некоторое решение)
, каждое решение (соответственно некоторое решение) ![]() с начальным условием
с начальным условием ![]() при
при ![]() существует и удовлетворяет неравенству
существует и удовлетворяет неравенству
![]() (
(![]() ).
).
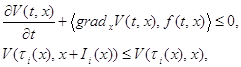
Асимптотическая устойчивость и слабая асимптотическая устойчивость определяются аналогично, но с дополнительным условием ![]()
Пример 1.
![]() (
(![]() ). Решение
). Решение ![]() асимптотически устойчиво. При
асимптотически устойчиво. При ![]() любое другое решение достигает положения равновесия x=0 за конечное время, а при
любое другое решение достигает положения равновесия x=0 за конечное время, а при ![]() за бесконечное время.
за бесконечное время.
Пример 2.
![]() , F(x) – отрезок с концами kx и mx.
, F(x) – отрезок с концами kx и mx. ![]() - решение. Для других решений имеем
- решение. Для других решений имеем
При ![]() асимптотически устойчиво,
асимптотически устойчиво,
при ![]() устойчиво,
устойчиво,
при ![]() слабо асимптотически устойчиво,
слабо асимптотически устойчиво,
при ![]() неустойчиво.
неустойчиво.
Для диф. уравнений с непрерывной правой частью известны теоремы Ляпунова об устойчивости и об асимптотической устойчивости [4]. В работе [17] сформулированы подобные теоремы для разрывных систем (1). Но для таких уравнений функция Ляпунова V(t,x) может не принадлежать ![]() .
.
Для функции ![]() (т.е. имеются непрерывные производныепервого порядка) определяются верхняя и нижняя производные в силу диф. включения (2):
(т.е. имеются непрерывные производныепервого порядка) определяются верхняя и нижняя производные в силу диф. включения (2):
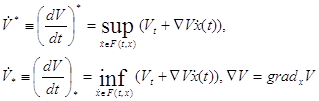
При почти всех t производная ![]() существует и удовлетворяет включению (2). При этих t существует
существует и удовлетворяет включению (2). При этих t существует
![]() (3)
(3)
Теорема 1.
Пусть в замкнутой области D (![]() ) для всех
) для всех ![]() - непустое, ограниченное, замкнутое, выпуклое множество и функция
- непустое, ограниченное, замкнутое, выпуклое множество и функция ![]() -непрерывна по t, x;
-непрерывна по t, x; ![]() и существуют функции
и существуют функции ![]() , для которых
, для которых![]() .
.
Тогда:
1) Если ![]() в D, то решение
в D, то решение ![]() включения (2) устойчиво.
включения (2) устойчиво.
2) Если, кроме того, существуют функции ![]()
![]() причем
причем ![]() ,
, ![]() , (
, (![]() ),
),![]() , то решение
, то решение ![]() асимптотически устойчиво.
асимптотически устойчиво.
Известные доказательства этих утверждений для диф. уравнений [4] остаются справедливыми и для диф. включений; при этом для оценки сверху функции V(t, x(t)) используют соотношение (3).
Теорема 2.
Если выполнены условия теоремы 1, но с заменой ![]() , то решение
, то решение ![]() слабо устойчиво в случае 1) и слабо асимптотически устойчиво в случае 2).
слабо устойчиво в случае 1) и слабо асимптотически устойчиво в случае 2).
Доказательство теоремы 2 приведено в [17].
Рассмотрим теперь случай, когда функция Ляпунова ![]() , но удовлетворяет условию Липшица в окрестности каждой точки области D. Тогда для любой абсолютно непрерывной функции x(t), значит и для любого решения, сложная функция V(t, x(t)) абсолютно непрерывна и почти всюду имеет производную по t. Однако решение может в течение некоторого промежутка времени идти по линии или поверхности, на которой grad V не существует, и производную dV/dt, нельзя, как в случае
, но удовлетворяет условию Липшица в окрестности каждой точки области D. Тогда для любой абсолютно непрерывной функции x(t), значит и для любого решения, сложная функция V(t, x(t)) абсолютно непрерывна и почти всюду имеет производную по t. Однако решение может в течение некоторого промежутка времени идти по линии или поверхности, на которой grad V не существует, и производную dV/dt, нельзя, как в случае ![]() , представить в виде
, представить в виде
![]()
Для ![]() :
:
![]() .
(4)
.
(4)
В случае функции V(t, x), удовлетворяющей условию Липшица, верхнюю и нижнюю производные ![]() от функции V в силу включения (2) можно определить как sup и inf правой части (4) по всем
от функции V в силу включения (2) можно определить как sup и inf правой части (4) по всем ![]() . Тогда теоремы 1и 2 сохраняются.
. Тогда теоремы 1и 2 сохраняются.
Пример 3.
Если ![]() , то нельзя пренебрегать отысканием dV/dt на линиях поверхностях разрыва функции f(t, x) даже в случае доопределения А.
, то нельзя пренебрегать отысканием dV/dt на линиях поверхностях разрыва функции f(t, x) даже в случае доопределения А.
![]()
![]()
Но этого недостаточно для применения теоремы 1, т.к. производные ![]() разрывны на осях координат, т.е. там же, где разрывны правые части системы. На оси Ox при доопределении А:
разрывны на осях координат, т.е. там же, где разрывны правые части системы. На оси Ox при доопределении А:
![]()
![]()
![]() , и условия теоремы 1 не выполнены. Тот же результат получается по формуле (4) при h=0:
, и условия теоремы 1 не выполнены. Тот же результат получается по формуле (4) при h=0:
![]() .
.
 Т.к. на оси Ox имеем
Т.к. на оси Ox имеем ![]() , то решения по оси удаляются от точки (0, 0) со скоростью 1 и решение
, то решения по оси удаляются от точки (0, 0) со скоростью 1 и решение ![]() неустойчиво
неустойчиво
§2. Некоторые сведения теории дифференциальных
уравнений с импульсным воздействием.
При математическом описании эволюции процессов с кратковременными возмущениями часто длительностью возмущения пренебрегают и считают, что эти возмущения носят “мгновенный” характер. Такая идеализация приводит к необходимости исследовать динамические системы с разрывными траекториями или, как их еще называют, диф. уравн. С импульсным воздействием.
Определение таких систем приведено [12], они задаются
а) системой диф. уравн.
![]() (5)
(5)
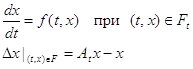
б) некоторым множествам Ft, заданным в расширенном фазовом пространстве,
в) оператором At, заданным на множестве Ft и отображающем его на множество ![]() .
.
Сам процесс происходит следующим образом: изображающая точка ![]() , выйдя из точки (t0, x0), движется по кривой {t, x(t)}, определяемой решением x(t) = x(t, t0, x0) системы уравнений (1). Движение по этой кривой осуществляется до момента времени t = t1 > t0, в который точка (t, x(t)), встречается с множеством Ft (попадает в точку множества Ft). В момент времени t = t1 точка Pt “мгновенно” перебрасывается оператором At из положения
, выйдя из точки (t0, x0), движется по кривой {t, x(t)}, определяемой решением x(t) = x(t, t0, x0) системы уравнений (1). Движение по этой кривой осуществляется до момента времени t = t1 > t0, в который точка (t, x(t)), встречается с множеством Ft (попадает в точку множества Ft). В момент времени t = t1 точка Pt “мгновенно” перебрасывается оператором At из положения ![]() в положение
в положение ![]() и движется дальше по кривой {t, x(t)}, которая описывается решением
и движется дальше по кривой {t, x(t)}, которая описывается решением ![]() системы уравнений (1). Движение по указанной кривой происходит до момента времени t2 > t1, в которой точка Pt снова встречается с множеством Ft. В этот момент под действием оператора At точка Pt мгновенно перескакивает из положения
системы уравнений (1). Движение по указанной кривой происходит до момента времени t2 > t1, в которой точка Pt снова встречается с множеством Ft. В этот момент под действием оператора At точка Pt мгновенно перескакивает из положения ![]() в
в ![]() и движется дальше по кривой {t, x(t)}, описываемой решением
и движется дальше по кривой {t, x(t)}, описываемой решением ![]() системы уравнений (1), до новой встречи с множеством Ft и т.д.
системы уравнений (1), до новой встречи с множеством Ft и т.д.
Совокупность соотношений а) – в) называют системой диф. уравнений с импульсным воздействием.
Кривую {t, x(t)} описываемую точкой Pt называют интегральной кривой, а функцию x = x(t), которая задает эту кривую – решением системы (1).
Систему диф. уравнений с импульсным воздействием (совокупность соотношений а)- в)) можно записать в более компактной форме:
 (6)
(6)
Т.о., решение системы уравнений (2) ![]() - это функция, удовлетворяющая уравнению (5) вне множества Ft и имеющая разрывы первого рода в точках Ft со скачками
- это функция, удовлетворяющая уравнению (5) вне множества Ft и имеющая разрывы первого рода в точках Ft со скачками
![]()
![]() - состояние системы до и после скачка в момент времени t1.
- состояние системы до и после скачка в момент времени t1.
В зависимости от характера импульсного воздействия выделяют несколько видов таких уравнений. Рассмотрим систему с нефиксированными моментами импульсного воздействия, т.е. системы, подвергающиеся импульсному воздействию в момент попадания изображающей точки Pt на заданные поверхности ![]() расширенного фазового пространства. Тогда система (6) примет вид:
расширенного фазового пространства. Тогда система (6) примет вид:
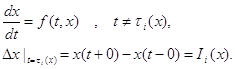 (7)
(7)
Устойчивость в системах с нефиксированными моментами
импульсного воздействия.
Определение 2.
Решение x(t) системы уравнений (7), определенное при всех t≥t0, называется устойчивым по Ляпунову, если для произвольных чисел ![]() и
и ![]() существует такое число
существует такое число ![]() , что для любого другого решения y(t) уравнений (7) из того
, что для любого другого решения y(t) уравнений (7) из того ![]() , что следует, что
, что следует, что![]() при всех t≥t0 таких, что
при всех t≥t0 таких, что ![]() , где
, где ![]() – моменты пересечения интегральной кривой решения x(t) поверхностей
– моменты пересечения интегральной кривой решения x(t) поверхностей ![]() .
.
Определение 3.
Решение x(t) системы уравнений (7) называется асимптотически устойчивым, если оно устойчиво в определенном выше смысле и если можно указать такое число ![]() , что для любого другого решения этой системы уравнений, удовлетворяющего неравенству
, что для любого другого решения этой системы уравнений, удовлетворяющего неравенству ![]() имеет место предельное равенство:
имеет место предельное равенство: ![]() .
.
Вопрос исследования устойчивости некоторого решения уравнения (7), как и в случае обыкновенных диф. уравнений, можно свести к вопросу исследования устойчивости тривиального решения некоторой новой системы уравнений с импульсным воздействием. Эта процедура описана в [12], в результате которой получим систему диф. уравн. с импульсным воздействием:
 (8)
(8)
где ![]() т.е. решение x=x(t) системы (7) перешло в положение равновесия системы (8).
т.е. решение x=x(t) системы (7) перешло в положение равновесия системы (8).
Вопрос устойчивости нулевого решения системы (8) можно решить с помощью прямого метода Ляпунова (метод функций Ляпунова).
Теорема 3.
Если существует положительно-определенная функция, удовлетворяющая в некоторой области D неравенствами
 (9)
(9)
то тривиальное решение системы уравнений (8) устойчиво.
Если же вместо второго из неравенств (9) потребовать, чтобы выполнялось неравенство
![]()
для всех ![]() - непрерывная при
- непрерывная при ![]() функция,
функция, ![]() , то нулевое решение уравнений (8) асимптотически устойчиво.
, то нулевое решение уравнений (8) асимптотически устойчиво.
Пример 4.
Исследовать вопрос устойчивости нижнего положения маятника, подверженного импульсному воздействию, динамика которого описывается уравнениями:
![]()
![]() ,
,
В качестве функции Ляпунова возьмем полную механическую энергию невозмущенного маятника ![]() находим
находим
 .
.
Независимо от свойств поверхностей ![]() выполняются условия теоремы (3), следовательно, нулевое решение исходной системы уравнений устойчиво.
выполняются условия теоремы (3), следовательно, нулевое решение исходной системы уравнений устойчиво.
§3. Связь рассматриваемых теорий.
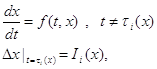
Теория систем с разрывной правой частью может быть сведена к теории диф. уравнений с импульсными возмущениями, а именно к системам с нефиксированными моментами импульсного воздействия, определение которых было дано в §2.
Пусть задана система
![]() (10)
(10)
где функция f(t, x) претерпевает разрыв на поверхности S: S(t, x)=0. Тогда множества ![]() , фигурирующие в определении импульсной системы, для системы (10) примут вид:
, фигурирующие в определении импульсной системы, для системы (10) примут вид:
![]()
где оператор ![]() действует по закону
действует по закону
![]()
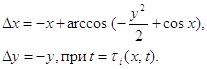
Если S(t, x)=0 разрешимо относительно t: ![]() , то систему (10) можно записать в виде:
, то систему (10) можно записать в виде:
![]() (11)
(11)
Второе уравнение системы (11) дает возможность решению уравнения (10) сойти с поверхности разрыва. Т.о., диф. уравнения с разрывной правой частью можно подвергнуть импульсному воздействию в момент прохождения изображающей точки поверхности разрыва.
Решение X(t) системы (10), сведенной к системе (11) будет строиться следующим образом. Пусть задано начальное условие ![]() . Тогда для
. Тогда для ![]() функция X(t) совпадает с решением системы (10) при условии
функция X(t) совпадает с решением системы (10) при условии ![]() Для
Для ![]() функция X(t) совпадает с решением системы (10) при условии
функция X(t) совпадает с решением системы (10) при условии ![]() ; для
; для ![]() – с решением системы (10) при условии
– с решением системы (10) при условии ![]() и т.д. Каждое решение x(t) будет представлять собой непрерывную функцию.
и т.д. Каждое решение x(t) будет представлять собой непрерывную функцию.
Но указанный способ построения решения системы (10) не позволяет доопределить f(t, x) на поверхности разрыва (как при доопределениях А, Б, В), так как осуществляется перескок ![]() через поверхность
через поверхность ![]() . В этом случае система (10) сводится к диф. включению
. В этом случае система (10) сводится к диф. включению
![]() (12)
(12)
где М – множество точек пересечения интегральной кривой поверхностей разрыва ![]() в моменты
в моменты ![]() .
.
Тогда решение x(t) (![]() ) диф. включения (12) устойчиво по Ляпунову, если для произвольных чисел
) диф. включения (12) устойчиво по Ляпунову, если для произвольных чисел ![]() существует такое число
существует такое число ![]() , что для любого другого решения
, что для любого другого решения ![]() включения (12) из того, что
включения (12) из того, что ![]() следует, что
следует, что ![]() при всех
при всех ![]() таких, что
таких, что ![]() , где
, где ![]() – моменты пересечения интегральной кривой решения x(t)
поверхностей
– моменты пересечения интегральной кривой решения x(t)
поверхностей ![]() .
.
Теорема 4. Достаточное условие отсутствия биения решений.
Пусть при ![]() функции
функции ![]() 2, 3,… непрерывны, а функции
2, 3,… непрерывны, а функции ![]() удовлетворяют условию Липшица, т.е.
удовлетворяют условию Липшица, т.е.
![]() при всех i=1, 2, …,
при всех i=1, 2, …, ![]() ,
,
и неравенству
![]() .
.
Тогда, если число h достаточно мало, то интегральная кривая любого решения системы уравнений (8) x(t) , определенного при всех ![]() и лежащего в области
и лежащего в области
![]() ,
,
пересекает каждую поверхность ![]() только один раз.
только один раз.
Доказательство этой теоремы приведено в [12].
Теорема 5.
Если решение x(t) включения (12), определенное при всех ![]() устойчиво по Ляпунову, то оно является устойчивым и для системы (8). Верно и обратное.
устойчиво по Ляпунову, то оно является устойчивым и для системы (8). Верно и обратное.
Доказательство.
Пусть выполнены условия теоремы 4, т.е. исключим случай биения решения уравнения (8) о поверхности ![]() .
.
Решение x(t)=0 включения (12) устойчиво. Докажем, что оно будет устойчивым и для системы (8).
Для диф. включения (12) существует определенно-положительная функция V(t, x), удовлетворяющая неравенству
 .
.
При почти всех t производная ![]() существует и удовлетворяет включению (12). При этих t существует и
существует и удовлетворяет включению (12). При этих t существует и
![]() ,
,
т.е. выполнено первое неравенство теоремы 3.
Т.к. ![]() где M – множество точек пересечения интегральной кривой поверхностей разрыва
где M – множество точек пересечения интегральной кривой поверхностей разрыва ![]() в моменты
в моменты ![]() , то указанная функция V(t, x) , будет удовлетворять и второму неравенству :
, то указанная функция V(t, x) , будет удовлетворять и второму неравенству :
![]() .
.
Т.о., выполнены условия теоремы 3 и решение x(t)=0 системы (8) устойчиво.
Обратно доказывается аналогично.
Заключение.
В связи с теорией релейных систем, систем с переменной стуктурой, реализацией законов оптимального управления и иных разрывных систем управления изучается общая теория разрывных систем. Эта теория восходит к задачам механики, где впервые изучались системы с сухим трением в трудах П. Пенлеве (1895 г. “Лекции о трении”) и Аппеля П.
В теории систем с разрывной правой частью учитываются как инженерно-физические, так и чисто математические соображения. Эта теория обеспечивает возможность математического исследования указанных систем, т. е. включает стандартные теоремы существования решений, их проджолжимости, теоремы качественной теории. Во второй главе приведено определение решения разрывных систем А.Ф. Филиппова. Как было отмечено, это определение соответствует минимальному возможному построению множества F(t, x) среди всех допустимых. Помимо определения Филиппова имеются и другие определения решений разрывных систем и диф. включений: Айзермана и Пятницкого [1] Викторовского [6], Матросова [8].
Теория систем с разрывными правыми частями основывается на теории дифференциальных включений, развитой Маршо и Зарембой (1934 г.), затем дополненной многочисленными авторами, в частности Важевским (1961 г.) и др. Связь этих теорий указана в §2 главы II. В третьей главе эти системы сводятся к системам дифференциальных уравнений с импульсным воздействием. Сформулирована и доказана теорема об устойчивости таких систем.
Литература.
1. Айзерман М. А., Пятницкий Е. С. Основы теории разрывных систем I, II. – Автоматика и телемеханика, 1974, № 7, 33-47, № 8, 39-61.
2. Алимов Ю. И. Об устойчивости в целом равновесного состояния нелинейных систем автоматического регулирования. – Известия вузов, Радиофизика, 1959, 2, № 6.
3. Андронов А. А., Витт А.А., Хайкин Р.Э. Теория колебаний. – М.: Физматгиз, 1959.
4. Барбашин Е.А. Введение в теорию устойчивости. – М.: Наука, 1967.
5. Барбашин Е.А., Алимов Ю.И. Ктеории релейных дифференциальных уравнений. – Известия вузов, сер. матем., 1962, № 1, 3-13.
6. Викторовский Е.Е. Об одном обобщении понятия интегральных кривых для разрывного поля направлений. – Математический сборник, 1954, 34, № 2, 213-248.
7. Гелиг А.Х., Леонов Г. А., Якубович В.А. Устойчивость нелинейных систем с неединственным состоянием равновесия. – М.: Наука, 1978.
8. Матросов В.М. О дифференциальных уравнениях и неравенствах с разрывными правыми частями I, II. – Диф. уравн.,1967, 3, № 3, 395-409; № 5, 869-878.
9. Неймарк Ю.И. Метод точечных отображений в теории нелинейных коледаний. – М.: Наука, 1972.
10. Неймарк Ю.И. о скользящем режиме релейных систем автоматического регулирования. – Автоматика и телемеханика, 1957, 18, № 1.
11. Рожко В.Ф. Устойчивость по Ляпунову в разрывных динамических системах. – Диф. уравн., 1975, 11, № 6 1005-1012.
12. Самойленко А.М. Пересчук Н.А. Системы диф. уравн. с импульсным возмущением. М.: Наука, 1987.
13. Терия систем с переменной структурой / Под ред. Емельянова С. В. – М.: Наука, 1981.
14. Уткин В.И. Скользящие режимы в задачах оптимизации и управления. – М.: Наука,1981.
15. Уткин В.И. Скользящие режимы и их применения в системах с переменной структурой. – М.: Наука, 1974.
16. Филиппов А.Ф. Дифференциальные уравнения с разрывной правой частью. – Математический сборник, 1960, 51, № 1, 99-128.
17. Филиппов А.Ф. дифференциальные уравнения с разрывной правой частью. – М.: Наука, 1985.
18. Филиппов А.Ф. Система диф. уравн. с несколькими разрывными функциями. – Математические заметки, 1980, 27, № 2, 255-266.
19. Филиппов А.Ф. Устойчивость для диф. уравн. с разрывными и многозначными правыми частями. – Диф. уравн., 1979, 15, № 6, 1018-1027.
[d1]
Похожие работы
... момент зависит лишь от того, в какой точке пространства находится в данный момент фазовая точка. Функцию v(x), дающую уравнение оптимальных траекторий в форме (1.35), называют синтезирующей функцией, а задачу нахождения синтезирующей функции ─ задачей синтеза оптимальных управлений. В разобранном примере синтезирующая функция была кусочно-непрерывной (даже кусочно-постоянной). Г л а в а ...
... была построена теория вложения функциональных пространств, которые в настоящее время носят название пространств Соболева. А.Н. Тихоновым была построена теория некорректных задач. Выдающийся вклад в современную теорию дифференциальных уравнений внесли российские математики Н.Н. Боголюбов, А.Н. Колмогоров, И.Г. Петровский, Л.С. Понтрягин, С.Л. Соболев, А.Н. Тихонов и другие. Влияние на развитие ...
... при финансовой поддержке государственной научно-технической программы «Физика квантовых и волновых процессов» (проект 1.61) и физического учебно-научного центра «Фундаментальная оптика и спектроскопия». 1. Асимптотическое поведение решений дифференциальных уравнений с малым параметром Многие колебательные системы описываются дифференциальными уравнениями с малым параметром при производных: ...
... , пока неизвестных полях. Поэтому изучение материальных тел как совокупности элементарных частиц требует введения дополнительных гипотез об их свойствах и взаимодействиях. Кроме того, для решения уравнений динамики необходимо знать начальные условия, т.е. координаты и скорости всех частиц, что принципиально невозможно. Однако для решения практических задач совсем не обязательно знать движение ...
0 комментариев