Ультразвуковое охранное устройство
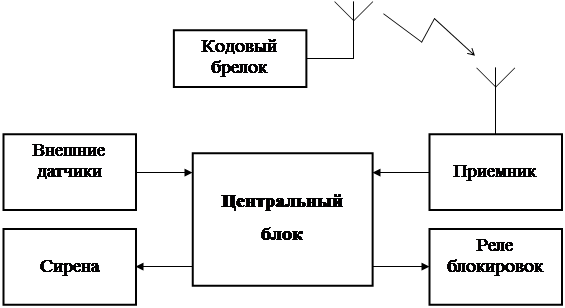
Построение структурной схемы
Особенности микроконтроллеров фирмы Atmel
Построение принципиальной схемы
Расчёт потребляемой мощности
Выбираю диоды, у которых значение выпрямленного тока и допустимого обратного напряжения равны или превышают расчетное
Расчет быстродействия
Разработка печатной платы
Базовое програмное обеспечение
Среда проектирования
Экономическая часть
Расчет заработной платы и статей калькуляции
Анализ опасных и вредных факторов при изготовлении устройства
Организационные мероприятия
Вопрос экологии
Навигация
Вопрос экологии
Охранная система с дистанционным управлением
114489
знаков
21
таблица
10
изображений
8.7 Вопрос экологии
Количество поступающих в атмосферу отходов достигает колоссальных размеров. Наиболее остро экологическая проблема стоит в городах, где на относительно незначительной территории сконцентрировано большое количество промышленных объектов, транспорта и где сосредоточено более 1/3 всего населения нашей планеты.
Вредные вещества, содержащиеся в воздухе даже в незначительных концентрациях, способны проникать в организм человека различными путями с разнообразными клиническими проявлениями. Загрязнение отходами производства открытых водоемов ухудшает их санитарное состояние, делает их использование в культурно-оздоровительных целях, а порой и для хозяйственного питьевого водоснабжения.
Если рассматривать отдельно электротехническую промышленность, а в частности производство печатных плат, то нужно отметить, что в процессе изготовления печатной платы должны соблюдаться правила и положения, направленные на предотвращение загрязнения окружающей среды, чтобы хоть как-то компенсировать загрязнение природы, нужно соблюдать законы и постановления, принятые с этой целью, а также требования техники безопасности, которые вплотную соприкасаются с требованиями охраны окружающей среды.
Это, во-первых, меры, которые должны применяться против загрязнения атмосферы от ядовитых паров хлористого водорода и окиси углерода, выделяющихся при пайке с припоями, а также паров фтора, выделяющихся при ожоге проводов с фторопластовой изоляцией.
Во-вторых, должны применяться меры для изоляции остатков кислоты, легко воспламеняющихся жидкостей от общей линии канализации.
В-третьих, отходы производства (обрезки изоляции, плат) должны сдаваться для дальнейшей переработки с целью последующего использования.
Для того чтобы снизить уровень загрязнений, хотя бы до минимального уровня, необходимо применять специальное оборудование, например, для очистки вентиляционного воздуха необходимо использовать фильтры, которые нейтрализовали бы токсичные вещества. Для снижения промышленных выбросов необходимо искать новые технологические решения, с помощью которых был бы возможен переход на новые методы производства, с минимальным загрязнением окружающей среды.
8.8 Выводы по охране труда
Для защиты рабочих, занятых в технологических процессах изготовления устройства, от воздействия опасных и вредных факторов необходимо проводить следующие организационные мероприятия: использование специальных помещений, оборудованных для обеспечения безопасных условий труда; содержание этих помещений в чистоте; использование специальной мебели и одежды. Кроме того, должен осуществляться периодический контроль состояния охраны труда на предприятии.
Кроме организационных мероприятий необходимо проводить технические мероприятия: следить за загрязненностью и загазованностью производственных помещений, поддержание температурно-влажностного режима.
Заключение
В данном дипломном проекте, который называется “охранная система с дистанционным управлением” разработано устройство, предназначенное для охраны материальных ценностей от пожара и проникновения злоумышленников. Устройство подключается к персональному компьютеру и позволяет все настройки и управление осуществлять с помощью специальной программы поддержки. Кроме того, устройство может управляться с помощью пульта дистанционного управления, применение которого делает данное устройство удобным в эксплуатации.
Данное устройство разработано в первую очередь для охраны компьютерных классов в учебных заведениях и учреждениях, однако может также применяться на промышленных объектах.
Схема построена на современной элементной базе. Ядром устройства является высокоскоростной микроконтроллер семейства PIC18F452.
В результате проектирования было разработано устройство со следующими технико-экономическими показателями:
Таблица 9.1 – охранная система с дистанционным управлением
| - Габариты | 120мм×70мм×35мм; |
| - Масса | 250 гр.; |
| - Коммутируемая нагрузка | до 1 кВт; |
| - Рабочая температура | -40…+60°C; |
| - Потребляемый ток | 304мА; |
| - Себестоимость прибора | (2088,3 руб./ед.) |
| - Цена блока | (2896,15 руб./ед.) |
Данные показатели соответствуют техническому заданию на разработку устройства.
Список литературы
1. Однокристальные микроконтроллеры Microchip: PIC16F8X : Пер с англ. / Под ред. А. Н. Владимирова. — Рига: ORMIX, 1996. — 96 с.
2. Долгий А. В. Разработка и отладка устройств на микроконтроллерах. // Радио.— 2001.— №5.- №12; 2002.— №1.
3. Кобахидзе Ш. Г. Микроконтроллеры для начинающих и не только. // Радио.— 2000.— №2.- №5.
4. Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. — Изд. шестое. М.: Мир, 2001. — 704 с.
5. Сучков Д. И. Основы проектирования печатных плат в САПР P-CAD 4.5, P-CAD 8.5 – 8.7 и ACCEL EDA. — М.: Горячая линия-Телеком, 2000.— 620 с.
6. С. П. Павлов, Л. С. Виноградов, Н. Ф. Крылова и др.; Под ред. С. П. Павлова. - Охрана труда в радио- и электронной промышленности: Учебник для техникумов. — 2-е изд., перераб. и доп. — М.: Радио и связь, 1985. — 200 с.
Приложение А
Листинг программы
TITLE "Turbo service system"
LIST P=18F452
#include <P18F452.INC>
__CONFIG_CONFIG1H, _OSCS_OFF_1H & _XT_OSC_1H
__CONFIG_CONFIG2L, _BOR_ON_2L & _BORV_27_2L & _PWRT_ON_2L
__CONFIG_CONFIG2H, _WDT_OFF_2H & _WDTPS_128_2H
__CONFIG_CONFIG3H, _CCP2MX_ON_3H
__CONFIG_CONFIG4L, _STVR_ON_4L & _LVP_OFF_4L & _DEBUG_OFF_4L
__CONFIG_CONFIG5L, _CP0_OFF_5L & _CP1_OFF_5L & _CP2_OFF_5L & _CP3_OFF_5L
__CONFIG_CONFIG5H, _CPB_OFF_5H & _CPD_OFF_5H
__CONFIG_CONFIG6L, _WRT0_OFF_6L & _WRT1_OFF_6L & _WRT2_OFF_6L & _WRT3_OFF_6L
__CONFIG_CONFIG6H, _WRTC_OFF_6H & _WRTB_OFF_6H & _WRTD_OFF_6H
__CONFIG_CONFIG7L, _EBTR0_OFF_7L & _EBTR1_OFF_7L & _EBTR2_OFF_7L & _EBTR3_OFF_7L
__CONFIG_CONFIG7H, _EBTRB_OFF_7H
ORG 0x00
BRA START
ORG 008
BRA INT
ORG 018
MOVWF W_TEMP2
MOVFF STATUS,STATUS_TEMP2
MOVFF BSR,BSR_TEMP2
BTFSC PIR1,1
BRA TM2_INT
BTFSC PIR1,TMR1IF
BRA TM1_INT
BTFSC INTCON3,0
BRA INT1_IN
BRA intr
TM2_INTBTFSS REM_FLAG,5;if ALARM not on
BRA TM2_end
BTFSC HL_STAT,5
BRA light
BSF PORTC,5
BRA TM2_end
LightMOVLW .25
MOVWF PULSE_DEL
BSF PORTC,5;ALARM PULSE on
pulsDECF PULSE_DEL
TSTFSZ PULSE_DEL
BRA puls
BCF PORTC,5;ALARM PULSE off
TM2_endBCF PIR1,1
BRA intr
INT1_INMOVFF ALARM_DEL,TMR2
BCF INTCON3,0
BRA intr
TM1_INTMOVLW .25
ADDWF ALARM_DEL
MOVLW .250
CPFSEQ ALARM_DEL
BRA rut
CLRF ALARM_DEL
rutDECF TIME_DEL
BTFSS EVENTS,5
BRA sens
DECFSZ UART_DEL
BRA $+4
BSF EVENTS,4;Set flag "CONNECT ERROR"
;Switch HL1..HL3-------------------------------
rtBTFSC HL_STAT,0;
BSF PORTC,0;Apply changes
BTFSC HL_STAT,1;on flag HL_STAT
BSF PORTC,1;
BTFSC HL_STAT,2;(active)
BSF PORTC,2;
BTFSS HL_STAT,0;
BCF PORTC,0;
BTFSS HL_STAT,1;(desactive)
BCF PORTC,1;
BTFSS HL_STAT,2;
BCF PORTC,2;
BCF PIR1,TMR1IF
intrMOVFF BSR_TEMP2,BSR
MOVF W_TEMP2,W
MOVFF STATUS_TEMP2,STATUS
RETFIE
;-------Coder for digits printing----------------------
CODERRLNCF WREG;WREG=WREG*2
ADDWF PCL,F;Step
RETLW 30;'0'
RETLW 31;'1'
RETLW 32;'2'
RETLW 33;'3'
RETLW 34;'4'
RETLW 35;'5'
RETLW 36;'6'
RETLW 37;'7'
RETLW 38;'8'
RETLW 39;'9'
;-------Interrupt subroutines-------------------------
INTMOVWF W_TEMP
MOVFF STATUS,STATUS_TEMP
MOVFF BSR,BSR_TEMP
MOVFF TMR0L,PERIOD;capture timer value
CLRF TMR0L
;-------
anothBTFSC FLAG,2;If parity bit will be received...
BRA PARITY;
BTFSC FLAG,1;If start bit was received...
BRA BIT_AN;
BTFSC FLAG,0;If "begin bit" set,then
BRA RES_AN;goto to analizing bit.
;
BTFSC INTCON,TMR0IF
LFSR FSR1,IRDA1
MOVLW B'00000001';set "begin receiving",
MOVWF FLAG;Reset flag "timer overflow"
CLRF COM_BUF;clear variables
BCF INTCON,TMR0IF
CLRF BIT;
BRA int_end;
RES_ANBTFSC INTCON,TMR0IF;If TMR0 overflow then error
BRA err
;Verifing...
MOVLW 0x6D;4 ms13 ms
CPFSGT PERIOD;normal 15 ms
BRA err;error if time is short
MOVLW 0xCB;6 ms17 ms
CPFSLT PERIOD;
BRA err;error if time is long
BSF FLAG,1;Set flag "START BIT"
BRA int_end
BIT_ANBTFSC INTCON,TMR0IF
BRA err
MOVLW 0x46;23-2.3 ms
CPFSLT PERIOD;12 ms
BRA err;error if time>H1 (normal 10 ms)
MOVLW 0x1A;old=43
CPFSGT PERIOD;0A-0.7 ms3 ms
BRA err;error if time<L0 (normal 5 ms)
;END of verifing
RLNCF COM_BUF;
MOVLW 0x30;14<X<1A
CPFSLT PERIOD;
BSF COM_BUF,0;if time>H0 then bit is "1"
CPFSGT PERIOD;
BCF COM_BUF,0;if time<H0 then bit is "0"
INCF BIT,F;
MOVLW .8
CPFSLT BIT
BSF FLAG,2;Next bit will be parity
BRA int_end;
PARITYBTFSC INTCON,TMR0IF
BRA err
MOVLW 0x46;23-2.3 ms
CPFSLT PERIOD;12 ms
BRA err;error if time>H1 (normal 10 ms)
MOVLW 0x1A;0A-0.7 msold=43
CPFSGT PERIOD;3 ms
BRA err;error if time<L0 (normal 5 ms)
MOVLW 0x30
CPFSLT PERIOD;
BSF FLAG2,0;if time>H0 then bit is "1"
CPFSGT PERIOD;
BCF FLAG2,0;if time<H0 then bit is "0"
;create received byte
MOVFF IRDA2,COMMAND
MOVFF IRDA3,PASS1
MOVFF IRDA4,PASS2
MOVFF IRDA5,PASS3
MOVFF IRDA6,PASS4
BSF REM_FLAG,3;Set flag "COMMAND" not executed
int_endBCF INTCON,INT0IF
MOVFF BSR_TEMP,BSR
MOVF W_TEMP,W
MOVFF STATUS_TEMP,STATUS
RETFIE
;-------Start of program----------------------------
STARTCLRF PORTA;
CLRF PORTB;Clear
CLRF PORTC;I/O ports
CLRF PORTD;
CLRF PORTE;
MOVLW B'00001111';
MOVWF TRISA;
SETF TRISB;
MOVLW B'11011000';
MOVWF TRISC;
CLRF TRISD;
CLRF TRISE;
MOVLW B'11010101';TMR0 16-bit counter
MOVWF T0CON;subdivider 1:64
;interrupts
MOVLW B'11010000';
MOVWF INTCON;
MOVLW B'10000000';INT1 fall_pulse
MOVWF INTCON2;
MOVLW B'00001000';Enable INT1 interrupt
MOVWF INTCON3;
MOVLW B'00000011';
MOVWF PIE1;interrupt TMR1,TMR2 enable
MOVLW B'00000000';All interrupts low priority
MOVWF IPR1;
MOVLW B'00000000';
MOVWF IPR2;
BSF RCON,7;Приоритетная система прерываний вкл.
;TMR1 setup
MOVLW B'00000001';TMR1 is active
MOVWF T1CON;subdivider 1:1
;TMR2 setup
MOVLW B'00001111';Enable, subdivider 1:16
MOVWF T2CON;
;A/D setup
MOVLW B'00000001';A/D enable
MOVWF ADCON0;CLK is Fosc/4
MOVLW B'01001110';Left justify;0 analog channels
MOVWF ADCON1;VDD and VSS references
;MSSP setup
MOVLW 0x0A;100 kHz
MOVWF SSPADD;Set speed
MOVLW B'00101000';MSSP enabled,
MOVWF SSPCON1;I2C Master mode
;Usart setup
MOVLW B'00100000';Asynchronic,8bit transfer
MOVWF TXSTA;low speed mode
MOVLW B'10010000';UART on
MOVWF RCSTA
MOVLW B'00011001';2400 baud,error +1.67%
MOVWF SPBRG
CLEARLFSR FSR0,00;
clCLRF POSTINC0;
MOVLW .100;
CPFSEQ FSR0L;
BRA cl;
;-------Main program block------------------------------
PROGALFSR FSR1,IRDA1
RCALL I2C_STOP_
MOVLW B'10010000'
MOVWF SLAVE_TRM
MOVFF SLAVE_TRM,I2C_ADDR
MOVLW 0xEE
MOVWF I2C_DATA
RCALL I2C_COM;Command 'start converting'
RCALL LCD_INIT;
CLRF TBLPTRU;Set message adress 7000
MOVLW B'01110000';
MOVWF TBLPTRH;
CLRF TBLPTRL;
RCALL LCD_LD1;
RCALL LCD_LD2;
RCALL LCD_PR1;
RCALL LCD_PR2;Приветствие
RCALL DELL;Pause
RCALL LCD_CLR1
RCALL LCD_CLR2
BSF EVENTS,4
;-------Start program---------------------------------------
CONNECTRCALL M_NO_CONN;Show message "Нет подлючения!"
MOVLW B'00100000';
MOVWF TBLPTRL;Show message "Температура"
RCALL LCD_LD2;
RCALL TERM_DISP;Measure and display temperature
RCALL ADC_CONV
RCALL LCD_PR2
begBTFSC EVENTS,4
RCALL UART_ST
RCALL TERM_DISP;Measure and display temperature
RCALL ADC_CONV
;1-----Start receiving!-----------------
LFSR FSR0,PACK1
PACK_RXRCALL UART_RD
BTFSC EVENTS,4;If CONNECT ERROR then restart
BRA CONNECT
MOVFF UART_DATA,POSTINC0
MOVLW 0x4B
CPFSEQ FSR0L
BRA PACK_RX
MOVFF PACK2,HL_STAT
MOVFF PACK3,TERMAL_L
MOVFF PACK4,TERMAL_H
MOVFF PACK5,AD_VREF
MOVFF PACK6,SENSOR_MODE
;-Transmite-----------------------------------------
PACK_TXMOVLW .16;Set address of device
MOVWF PACK_OUT1;
MOVFF SENS1_STAT,PACK_OUT2;
MOVFF SENS2_STAT,PACK_OUT3;
MOVFF AD,PACK_OUT4;
MOVFF TERMAL,PACK_OUT5;
MOVFF ADD_BYTE,PACK_OUT6
LFSR FSR0,PACK_OUT1;Write data to terminal
txMOVF POSTINC0,W;
RCALL UART_WRT;
RCALL M_DEL;6 bytes...
MOVLW 0x55;
CPFSEQ FSR0L;
BRA tx;
asddRCALL LCD_PR1
RCALL LCD_PR2
;+++++++++++Place for main subroutine+++++++++++++++
BTFSS HL_STAT,7
BRA m_block
BCF SENS1_STAT,5;Reset flag "Change status HL1"
BCF SENS1_STAT,6;Reset flag "Change status HL2"
BCF SENS1_STAT,7;Reset flag "Change status "HL3"
BCF SENS2_STAT,6;Reset flag "Was command from IRDA"
BCF SENS2_STAT,7;Reset flag "Change security mode"
sens_vrCLRF PASS1
CLRF PASS2
CLRF PASS3
CLRF PASS4
BTFSC SENS1_STAT,0;Set flag "perimetr error"
BSF EVENTS,1;if sensors unlock
BTFSC SENS1_STAT,1;
BSF EVENTS,1;
BTFSC SENS1_STAT,2;
BSF EVENTS,1
re2MOVF AD_VREF,W
CPFSLT AD
BSF EVENTS,1
re3MOVF TERMAL_H,W
CPFSLT TERMAL
BSF EVENTS,2;if TERMAL>TERMAL_H
MOVF TERMAL_L,W;
CPFSGT TERMAL;if TERMAL<TERMAL_L
BSF EVENTS,3;
BTFSS EVENTS,2;
BRA re4
RCALL M_FIRE;FIRE CONTROL
BSF REM_FLAG,5
BRA gym2
re4BTFSS HL_STAT,3;if mode=off then ok
BRA gym
RCALL M_ACES_NO;
BTFSC EVENTS,1;If sensors unlock,
RCALL M_PERIM;Show message "Периметр нарушен"
BTFSC EVENTS,1
BSF REM_FLAG,5
BTFSC EVENTS,3
BSF REM_FLAG,5
BTFSC EVENTS,3
RCALL M_COLD;Show message "Переохлаждение!"
BRA gym2
;+++++++++++End of place for main subroutine+++++++++++++++++++
gymRCALL M_ACES_OK
gym2BTFSS HL_STAT,4;Verifying reset command from PC
BRA main_end
BCF EVENTS,1;Reset perimetr
BCF EVENTS,2;Reset fire
BCF EVENTS,3;Reset cold
BCF EVENTS,4;Reset connect error
BCF PORTC,5;Reset ALARM_LIGHT
BCF PORTA,5;Reset flag for external system
BCF ADD_BYTE,0
BCF REM_FLAG,5;Reset flag ALARM_LIGHT
CLRF PASS_ERR
main_endBRA beg
;++++++++++++++++++++++++++++++++++++++++++++++++++++++
GOTO FINAL
;--------------------------------------------------------
;Different subroutines
;--------------------------------------------------------
M_DELMOVLW .49
MOVWF CYC2
mdl1DECF CYC2,F
MOVLW .255
MOVWF CYC
mdlDECF CYC,F
TSTFSZ CYC
BRA mdl
TSTFSZ CYC2
BRA mdl1
RETURN
;--------------------------------------------------------
UART_WRTMOVWF TXREG
BTFSS PIR1,4
BRA $-2
BCF PIR1,4
RETURN
;--------------------------------------------------------
UART_STBCF EVENTS,0
BCF EVENTS,1
BCF EVENTS,2
BCF EVENTS,3
BCF EVENTS,5
BCF PIR1,5
BCF EVENTS,4
BCF RCSTA,4
BSF RCSTA,4
ur_stBTFSS PIR1,5
BRA $-2
BCF PIR1,5
MOVFF RCREG,UART_DATA
MOVLW .238
CPFSEQ UART_DATA
BRA ur_st
RETURN
;--------------------------------------------------------
UART_RDRCALL UART_WAIT
MOVFF RCREG,UART_DATA
RETURN
;--------------------------------------------------------
DELLMOVLW .8;8-Time delay.
MOVWF TIME_DEL;Variable LSD is
tmdTSTFSZ TIME_DEL
BRA tmd
RETURN
;--------Sub-zero termo-correction-------------------------
TERM_CORRMOVLW 2D;"-"
MOVWF MSD;MSD used temporary
BCF SENS1_STAT,3
MOVF I2C_BYTE1,W
SETF I2C_BYTE1
SUBWF BYTE1
RETURN
;-------------------------------------------------------
TERMOSCANMOVFF SLAVE_TRM,I2C_ADDR;Slave-address DS1621
MOVLW 0xAA;Command "Read temperature"
MOVWF I2C_DATA
RCALL I2C_2RD
RETURN
;-----------------------------------------------------------
M_NO_CONNMOVLW B'1110000';
MOVWF TBLPTRL;Show message "Нет подключения!"
RCALL LCD_LD1;
RCALL LCD_PR1
RETURN
;-----------------------------------------------------------
M_ACES_OKMOVLW B'00110000';
MOVWF TBLPTRL;Show message "Доступ разрешен"
RCALL LCD_LD1;
RCALL LCD_PR1
RETURN
;-----------------------------------------------------------
M_FIREMOVLW B'01000000';
MOVWF TBLPTRL;Show message "Пожарная тревога!"
RCALL LCD_LD1;
RCALL LCD_PR1
BSF PORTA,5;Set flag for external system
RETURN
;-----------------------------------------------------------
M_PERIMMOVLW B'01010000';
MOVWF TBLPTRL;Show message "Периметр нарушен!"
RCALL LCD_LD1;
RCALL LCD_PR1
BSF PORTA,5;Set flag for external system
RETURN
;-----------------------------------------------------------
M_COLDMOVLW B'10000000';
MOVWF TBLPTRL;Show message "Переохлаждение!"
RCALL LCD_LD1;
RCALL LCD_PR1;
BSF PORTA,5;
RETURN
;-----------------------------------------------------------
M_ACES_NOMOVLW B'01100000';
MOVWF TBLPTRL;Show message "Доступ запрещен!"
RCALL LCD_LD1;
RCALL LCD_PR1
RETURN
;-----------A/D Converting----------------------------------
ADC_CONVMOVLW D'20'
MOVWF DEL_ADC
DECFSZ DEL_ADC,F
BRA $-2
BSF ADCON0,GO;Start A/D conversion
WaitBTFSS PIR1,ADIF;Wait for conversion to complete
BRA $-2
BCF PIR1,ADIF
MOVFF ADRESH,AD
RETURN
;-------Looped end of program----------------------------
FINALNOP
BRA FINAL
END
Похожие работы


... , элементы питания – 2400 мм2) высота пульта управления с учётом ширины корпуса будет равна 10 мм. 7. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ 7.1 Характеристика проекта Проектируемая система представляет собой систему охранной сигнализации автомобилей. В разрабатываемой системе будут реализованы функции, как автономной охраны, так и централизованной. Так, например, она будет в режиме «Тревога» ...
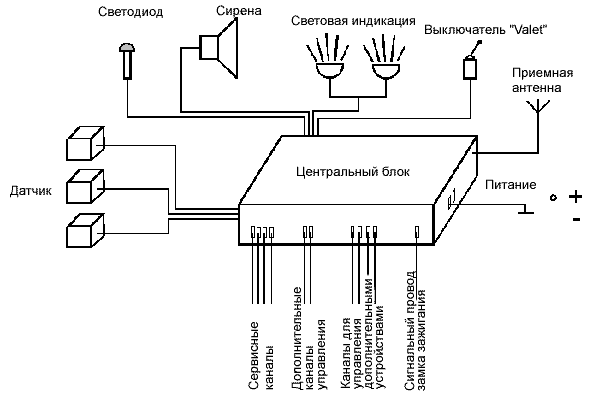

... полностью выключена и автомобиль в таком состоянии можно отдавать в сервис, сняв со связки ключей все брелки. Вам не придется обучать слесаря, которого вы видите в первый раз, всем премудростям охранной системы автомобиля. Зачем ему это! Таким образом, никто кроме вас не будет знать где и какие охранные системы установлены на вашем автомобиле. Другой функцией выключателя «Valet» является то, что ...
... (магнитные защелки, задвижки и т.п.) закрывающих элементов с возможностью перемещения их вручную при открывании или закрывании в экстремальных условиях Рассмотрим требования к основным компонентам СКУД. Требования к устройствам идентификации Считыватели должны обеспечивать надежное считывание кода с идентификаторов преобразование его в электрический сигнал и передачу на контроллер. ...
... охраны имеют слабую защищенность от саботажа и как правило являются системами одноразового действия, поэтому их целесообразно применять только в комплексе с другими периметральными системами охранной сигнализации. При оснащении объектов, имеющих ограждения (заборы), в качестве периметральных систем охранной сигнализации рекомендуется использовать в основном емкостные, радиолучевые, радиоволновые ...
0 комментариев