Навигация
3.2.2. Станки токарной группы
При обработке деталей типа тел вращения заготовку требуется крепить либо в патроне, либо в центрах. В каждом конкретном случае необходимо определить метод обработки;
· на станках патронных;
· на станках центровых;
· на станках патронно-центровых.
Применение патронно-центровых токарных станков с ЧПУ повышает универсальность ГПС вследствие широкой номенклатуры обрабатываемых деталей, но в тоже время увеличивает габариты ГПС, а следовательно и производственные площади.
При использовании патронных станков с указанной станиной производственные площади сокращаются.
Из анализа ГПС вытекает следующее: чем меньше размер партии запуска и больше номенклатура изделия, т.е. чем меньше серийность, тем эффективнее применение патронно-центровых токарных станков.
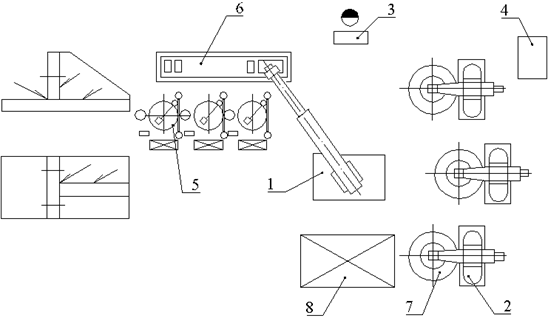
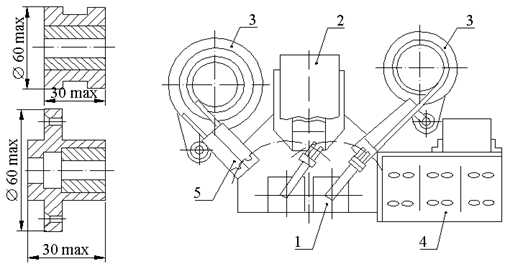
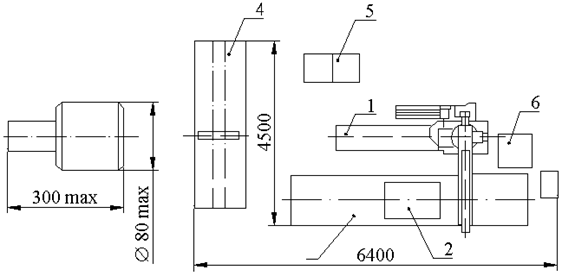
РТК мод. МО1И611 – «Ритм» (рис. 7) предназначен для токарной (патронной и центровой) обработки мелких деталей типа тел вращения из штучных заготовок массой до 0,1 кг. ПР мод. «Ритм-01.08», установленный на крышке шпиндельной бабки токарно-винторезного станка с ЧПУ мод. 1И611ПМФ3, производит его загрузку заготовками, находящимися на позиции выдачи их вибробункером. Обработанные изделия ПР снимает со станка и сбрасывает в тару через специальный лоток.
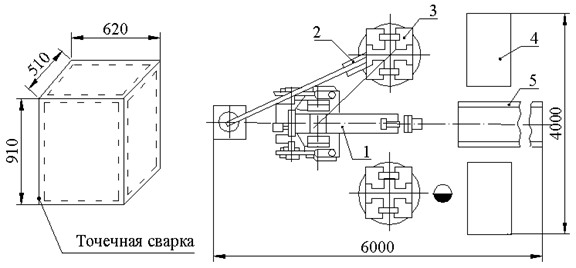
Для токарной обработки деталей типа длинных валов массой до 5 кг из штучных заготовок используют РТК мод. 1708ПР4 (рис.3.8), включающий в себя многорезцовый станок-полуавтомат типа 1708, автоматизированное загрузочное устройство (тактовый стол) для поштучной выдачи заготовок и обслуживающий их ПР напольного типа мод. ПР4.
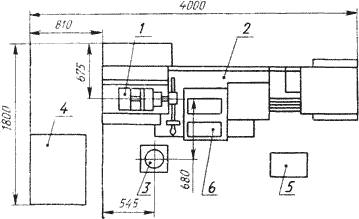
1 – ПР «Ритм-01.08» (1 шт.);
2 – станок токарно-винторезный с ЧПУ мод. 1И611ПМФ3 (1 шт.);
3 – вибробункер (1 шт.);
4 – устройство ЧПУ станка (1 шт.);
5 – устройство ЧПУ ПР типа АС-2611 (1 шт.);
6 – тара (1 шт.).
Рис. 7. РТК для обработки мелких деталей типа тел вращения в крупносерийном производстве мод. МО1И611 «Ритм»
ПР в составе комплекса выполняет следующие операции: загрузку и разгрузку станка, сбрасывание детали в тару, а также управление включением автоматического цикла работы станка. В станке имеется конвейер для удаления стружки, которая автоматически подается в тару.
3.2.3. Станки для обработки корпусных и плоскостных деталей
Для обработки корпусных и плоскостных деталей применяются обрабатывающие центры и модули на их основе.
Для деталей размерами в плане от 250![]() 250 до 2500
250 до 2500![]() 4000 мм: 21104Н7Ф4; ИР320ПМФ4; 2204ВМФ4; 2254ВМФ4; 225ВМФ4; ИР500МФ4; ИР800МФ4; 65А60МФ4; УФ0908.
4000 мм: 21104Н7Ф4; ИР320ПМФ4; 2204ВМФ4; 2254ВМФ4; 225ВМФ4; ИР500МФ4; ИР800МФ4; 65А60МФ4; УФ0908.
Гибкость станочных модулей определяется тремя видами связей:
· транспортировкой заготовок и деталей между складом, позицией установки (снятия) деталей, контрольно-измерительным модулем. Расстановка станочных модулей зависит от вида выбранного транспорта (конвейеры, рольганги, рельсовые тележки или робокары), а также организации централизованного или децентрализованного складирования заготовок (общий склад, общие накопители паллет, индивидуальные накопители у каждого станка и различные комбинации этих трех видов).
· подачей режущего инструмента к станкам (наличие центрального инструментального склада, единого для всех станков; индивидуальные на каждый станок сменные магазины или индивидуальная подача инструмента на каждый станок с участка предварительной настройки инструмента и др.).
· информационными потоками между ЭВМ, управляющими различными модулями системы, общим использованием различных пакетов программного обеспечения и пультами управления.
Простейший ГПМ включает станок типа ОЦ с одним или двумя инструментальными магазинами. Станок имеет два рабочих стола. Заготовку устанавливают на стол вручную, в то время как на другом столе производится обработка детали.
Более современным является ГПМ, содержащий станок типа ОЦ с одним или двумя магазинами и накопителями палет.
Из общего числа типоразмеров деталей, изготовляемых в механообрабатывающем производстве, наибольшая часть (более 2/3 общей номенклатуры) приходится на призматические, плоские, а также фигурные, профильные и другие детали сложной формы. Среди них призматические детали, количество наименований которых не превышает 15…20 % общей номенклатуры деталей, являются наиболее трудоемкими в изготовлении. Себестоимость обработки корпусных деталей, являющихся основным видом призматических деталей, составляет более половины общей себестоимости механообработки в машиностроении. Плоские и другие детали сложной формы, не относящиеся к телам вращения, при значительном числе наименований (более 50 % номенклатуры) составляют менее 20 % общей стоимости механообработки.
Характерной особенностью изготовления корпусных деталей является их мелкосерийный, а иногда и единичный характер производства. В связи с этим при комплексной автоматизации механообрабатывающего производства корпусных деталей наиболее эффективно используются ГПМ, ГАУ и ГАЛ на их базе.
При механообработке заготовок плоских, некоторых призматических и других деталей сложной формы, обычно имеющих небольшие габариты, используются РТК, РТУ и РТЛ на базе фрезерных, сверлильно-расточных, зубо, резьбообрабатывающих, электрофизических, электрохимических и других станков. таким образом, создается возможность дополнительной автоматизации широко используемых в машиностроении универсальных станков с целью встраивания их в ГПС.
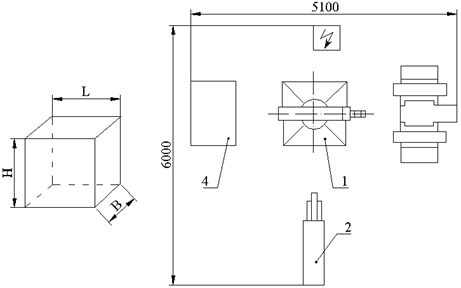
РТК, выполненный на базе горизонтально-фрезерного станка мод. 6М80 (специальное исполнение), тактового стола и промышленного робота, напольного типа мод. МП96, предназначен для фрезерной обработки деталей типа пласт массой до 0,2 кг из штучных заготовок (рис. 8).

Рис. 8 - Комплекс мод. 6М80 МП-9С
Список использованной литературы
1. Автоматизированные комплексы механической обработки валов с использованием промышленных роботов. Метод. рекомендации, ЭНИМС. –М.: НИИмаш, 1983, -64 с.
2. Грачев Л.Н. и др. Автоматизированные участки для точной размерной обработки деталей.-М.: Машиностроение, 1981,- 240с., ил.
3. Гибкое автоматическое производство./ Под ред.Майорова С.А. и Орловского Г.В. – Л.: Машиностроение, Ленинградское отделение, 1983, - 376с., ил.
4. Гавриш А.П. и др. Роботизированные механообрабатывающие комплексы машиностроительного производства. – К.: Техника, 1984, - 198 с., ил.
5. Гибкие производственные комплексы/Под редакцией П.Н.Белянина и В.А.Лещенко. – М.: Машиностроение, 1984, -384 с., ил.
6. Дащенко А.И. и др. Проектирование автоматических линий. – М.: Высшая школа, 1983, - 328 с., ил.
7. Полетаев В.А., Третьякова Н.В., Разработка компоновки и планировки гибких производственных систем. Методические указания. г.Иваново, ИГЭУ, 1999.
Похожие работы
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...


... , комплексными или локальными; стратегическими, тактическими (как правило, годовыми) или оперативными. Распространенными методами организации работ по планированию являются сетевые методы и построение оперограмм. Рассмотрим кратко эти методы. Сетевое планирование и управление (СПУ) — это графоаналитический метод управления процессами создания (проектирования) любых систем. Сетевой график — ...
... станы, турбины и т. д.), специальной оснастки, в опытном производстве, при выполнении отдельных видов ремонтных работ и т. п. Отличительными особенностями индивидуального метода организации производства являются: неповторяемость номенклатуры изделий в течение года; использование универсального оборудования и специальной оснастки; расположение оборудования по однотипным группам; разработка ...
... и контроля. Обслуживание ковочных агрегатов с программным управлением (гидравлического пресса, ковочного автоматического манипулятора) для автоматизации ковки деталей с вытянутой осью (круглого, квадратного и прямоугольного сечений) массой 0,4—2,0 т. 2 Гибкие производственные модули (ГПМ) 2.1 Общее представление о гибких производственных модулях Гибкие производственные модули (ГПМ), ...
0 комментариев