Навигация
Другие итерационные методы решения систем нелинейных уравнений
37732
знака
2
таблицы
12
изображений
3. Другие итерационные методы решения систем нелинейных уравнений
3.1 Метод Пикара
Существуют также итерационные методы решения систем нелинейных уравнений, которые учитывают вид конкретной системы.
Так, если в уравнениях системы можно выделить линейную l(X) и нелинейную g(X)части функций fi(X) = li(X) + gi(x), то удобней применить к ней метод Пикара.
В таком случае систему уравнений можно записать в виде
li(X) = - gi(X), i=1,2,3...n;
или в векторной форме A X= - G(X);
где A- матрица коэффициентов линейных частей уравнений;
G(X) - вектор-функция нелинейных частей уравнений.
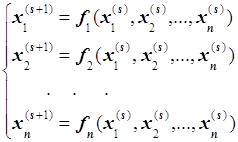
Выберем некоторый начальный вектор X(0) и построим итерационный процесс в виде
A X(k+1)=-G(X(k)).
Для выполнения одной итерации таким методом необходимо решать систему линейных уравнений, у которой вектором свободных членов будут нелинейные части функций fi(X). Причем поскольку матрица A остается неизменной при всех итерациях, то для решения СЛАУ можно использовать специальные алгоритмы, предусматривающие возможность преобразования только столбца свободных членов.
3.2 Метод релаксаций
Перепишем систему в виде
X=X+ F(X),
где - некоторая константа, и построим итерационный процесс по схеме
X(k+1) = X(k) + F(X(k)).
Параметр должен быть таким, чтобы в окрестности решения выполнялось достаточное условие сходимости
||Е+ W|| < 1,
где E- единичная матрица.
На практике выполнение этого условия достаточно сложно проверить, поэтому значение параметра выбирают пробным путем, проверяя выполнение необходимого условия сходимости после выполнения каждой итерации
||X(k)-X(k-1)||<||X(k-1)-X(k-2)||.
Если окажется, что на какой-либо итерации это условие не выполняется, то необходимо изменить значение параметра .
3.3 Метод градиентного спуска
Пусть имеем систему уравнений ![]() (А)
(А)
Предположим, что функции ![]() действительные и непрерывно дифференцированные в их общей области определения. Рассмотрим функцию
действительные и непрерывно дифференцированные в их общей области определения. Рассмотрим функцию
![]() (В)
(В)
Очевидно, что каждое решение системы (А) превращает в ноль функцию U(x); наоборот, числа ![]() , для которых функция U(x) равняется нулю, является корнем системы (А).
, для которых функция U(x) равняется нулю, является корнем системы (А).
Предположим, что система имеет лишь изолированное решение, которое представляет собой точку строго минимума функции U(x) в n-мерном пространстве ![]() .
.
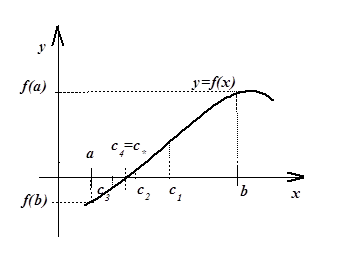
Пусть x - вектор системы (А) и x0 - его нулевое приближение. Через точку x0 проведем поверхность уровня функции U(x). Если точка x0 довольно близка к корню x, то при наших предположениях поверхность уровня
U(x)= U(x0)
будет похожа на эллипсоид.
Из точки x0 движемся по нормали к поверхности U(x)= U(x0) до тех пор, пока эта нормаль не затронет в некоторой точке x1 какой-то другой поверхности уровня U(x)= U(x1).
Потом, отправляясь от точки x1, снова движемся по нормали к поверхности уровня U(x)= U(x1) до тех пор, пока эта нормаль не затронет в некоторой точке x2 новой поверхности уровня U(x)= U(x2), и т.д.
Поскольку U(x0)>U(x1)>U(x2)>..., то, двигаясь таким путем, мы быстро приближаемся к точке с наименьшим значением U ("дно ямы"), что отвечает искомому решению исходной системы. Обозначим через
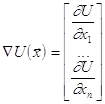
градиент функции U(x).
Находить нужное решение будем по формуле:
![]()
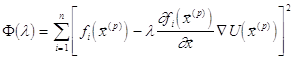
Остается определить множители ![]() . Для этого рассмотрим скалярную функцию
. Для этого рассмотрим скалярную функцию
![]()
![]()
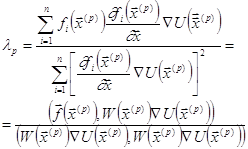
Функция F(l) дает изменение уровня функции U вдоль соответствующей нормали к поверхности уровня в точке xp. Множитель ![]() надо выбрать таким образом, чтобы F(l) имела минимум. Беря производную по l и приравнивая ее нулю, получаем уравнение
надо выбрать таким образом, чтобы F(l) имела минимум. Беря производную по l и приравнивая ее нулю, получаем уравнение
![]() .
.
Наименьший положительный корень этого уравнения и даст нам значение ![]() .
.
Будем считать, что l - малая величина, квадратом и высшими степенями которой можно пренебрегать. Имеем:
![]()
Раскладывая функции ![]() за степенями l с точностью до линейных членов, получим:
за степенями l с точностью до линейных членов, получим:
 ,
,
где 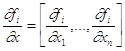 .
.
Отсюда

Итак,
 , где
, где 
- матрица Якоби вектор- функции f.
Дальше, имеем:
![]() .
.
Отсюда
 ,
,
где W'(x) - транспонированная матрица Якоби.
Поэтому окончательно
 ,
,
причем
![]() .
.
Похожие работы

... метод Бройдена, написана программа реализующая его. СПИСОК ЛИТЕРАТУРЫ 1. С.Л. Подвальный, Л.В. Холопкина. Вычислительная математика- учебное пособие ВГТУ, 2004 - 147 с. 2. Методы решения систем нелинейных уравнений. Метод Ньютона. Его реализации и модификации. - Электрон. дан. – Режим доступа: www.exponenta.ru/educat/referat/XVkonkurs/15/index.asp. ПРИЛОЖЕНИЕ Текст программы ...

... –0.6 = 0 9. 10. ( x -1)3 + 0.5ex = 0 11. 12. x5 –3x2 + 1 = 0 13. x3 –4x2 –10x –10 = 0 14. 15. 16. 17. 18. 19. 20. 21. 22. 23. 24. x 4- 2.9x3 +0.1x2 + 5.8x - 4.2=0 25. x4+2.83x3- 4.5x2-64x-20=0 26. МЕТОДЫ РЕШЕНИЯ СИСТЕМЫ НЕЛИНЕЙНЫХ УРАВНЕНИЙ 1. Постановка задачи Пусть требуется решить систему n ...

... 1040, мы все еще получаем сходимость, при количестве итераций порядка 130. 4 Анализ результатов, выводы Целью нашего исследование было сравнение методов простой итерации и Ньютона для решения систем из двух нелинейных уравнений по числу итераций, времени сходимости в зависимости от выбора начального приближения к решению и допустимой ошибки. Зависимость этих параметров от выбора начального ...
... с помощью рекурентных соотношений? 104) Приведите конечно-разностные выражения для первой производной. 105) Подынтегральная функция y = f(x) задана таблицейВзяв h = 0,3, вычислить интеграл на отрезке [0,3; 0,9] методом Симпсона. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету ЧИСЛЕННЫЕ МЕТОДЫ Билет № 22 106) Как ...
0 комментариев