Построение статической характеристики объекта
Аппроксимация полиномом второго порядка
Расчет коэффициентов передачи
Модель объекта первого порядка без запаздывания
Модель объекта первого порядка с запаздыванием
Построение математической модели
Выбор и расчет параметров настройки регуляторов
Расчет ПИ-регулятора
Обзор методов исследования на устойчивость
Проверка устойчивости по критерию Рауса
Проверка устойчивости по корням характеристического уравнения
Оценка качества функционирования АСР
Навигация
Аппроксимация полиномом второго порядка
Автоматическая система регулирования с П-регулятором
45149
знаков
18
таблиц
55
изображений
1.3 Аппроксимация полиномом второго порядка
Модель второго порядка описывается уравнением вида:
у = а . х![]() + b . х + с.
+ b . х + с.
Для нахождения коэффициентов а, b, с, удовлетворяющих всем состояниям объекта регулирования составим систему алгебраических уравнений второго порядка, причем число уравнений в системе равно числу состояний объекта в эксперименте:

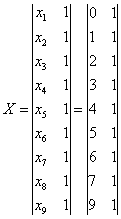
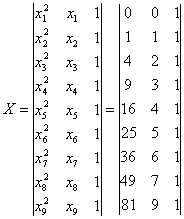
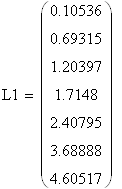
Для решения данной системы алгебраических уравнений воспользуемся матричным методом наименьших квадратов. Составим матрицы входных и выходных сигналов:
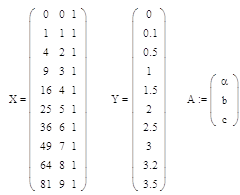
Получим систему с тремя неизвестными: X . A = Y
 .
.
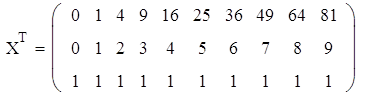
Решим матричное уравнение:
Х т . Х . А = Х т . У
где А - матрица коэффициентов полинома второго порядка.

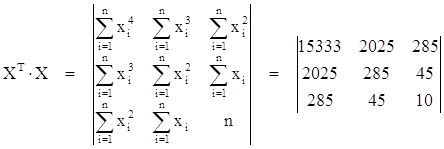 |
Получим систему трех алгебраических уравнений
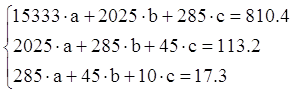
Решив ее, определим коэффициенты a, b, c.
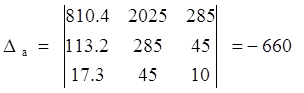
Найдем главный определитель системы:

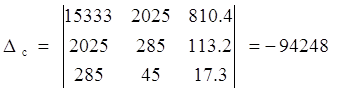
Найдем вспомогательные определители системы:
Найдем коэффициенты a,b,c:

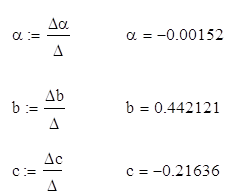
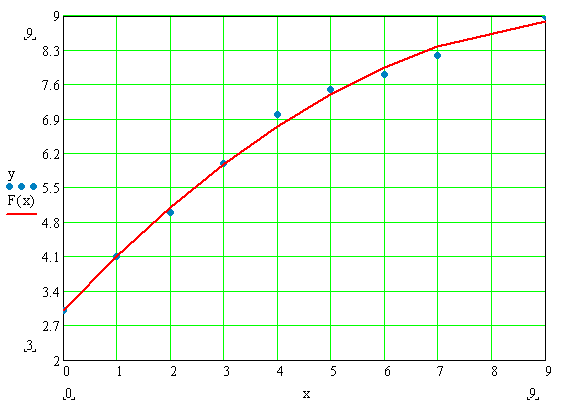
Таким образом, получили полином второго порядка:
y = -0.00152 . xi2 + 0.442121 . xi -0.21636
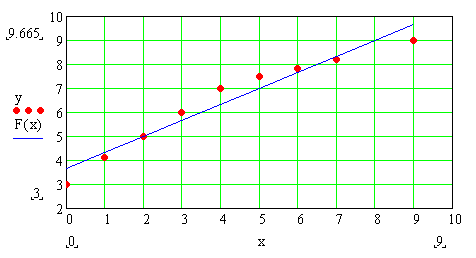
Для оценки полученного полинома вычислим значения функции и сравним их с экспериментальными данными:

Полученные результаты сведем в таблицу 3
| i | x | y | yi | Δy |
| 1 | 0 | 0 | -0.216 | 0.216 |
| 2 | 1 | 0.1 | 0.224 | -0.124 |
| 3 | 2 | 0.5 | 0.662 | -0.162 |
| 4 | 3 | 1 | 1.096 | -0.096 |
| 5 | 4 | 1.5 | 1.528 | -0.028 |
| 6 | 5 | 2 | 1.956 | 0.044 |
| 7 | 6 | 2.5 | 2.382 | 0.118 |
| 8 | 7 | 3 | 2.804 | 0.196 |
| 9 | 8 | 3.2 | 3.224 | -0.024 |
| 10 | 9 | 3.5 | 3.640 | -0.14 |
Сумма квадратов отклонений равна: åDуi 2 = 0.173
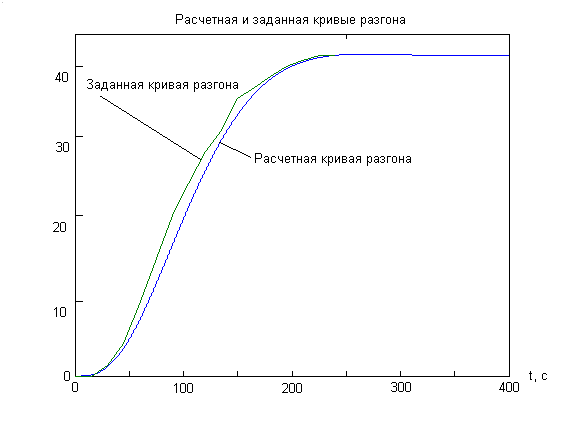
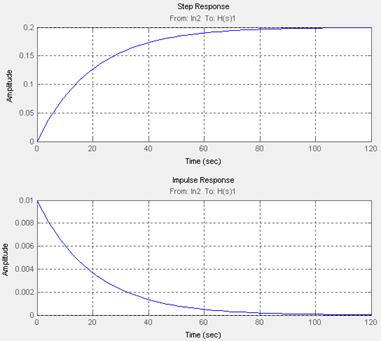
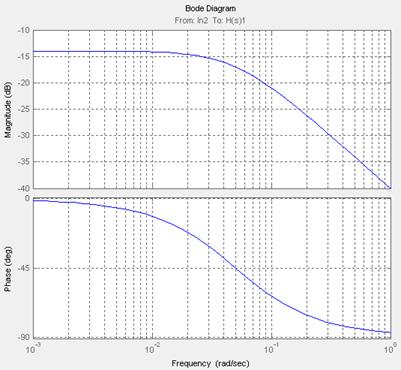
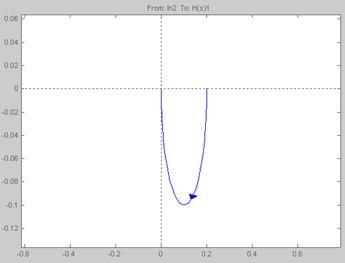
Ниже приведен проверочный расчет модели объекта первого порядка на ЭВМ в системе MathCad.

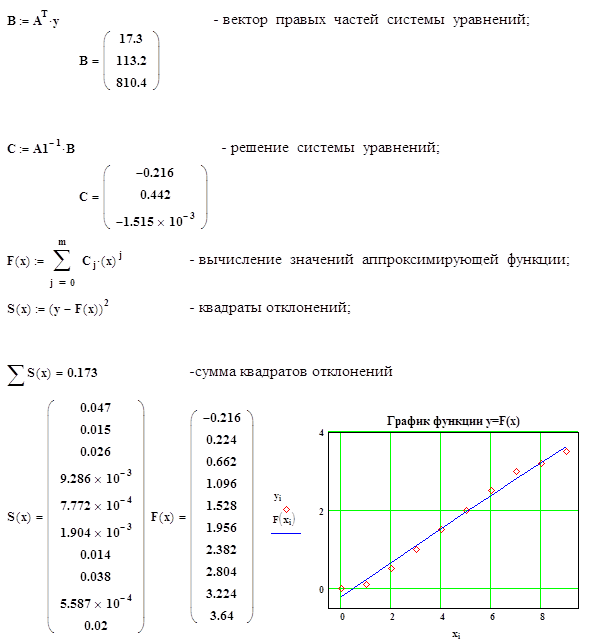
Сравнивая суммы квадратов отклонений видно, что полином второго порядка лишь немногим точнее описывает поведение объекта, чем полином первого порядка. Из чего следует, что поведение объекта подчиняется уравнению очень близкому уравнению линии. Для расчетов используем уравнение найденное с помощью полинома второго порядка.
Похожие работы
... свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования. В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона ...
... ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 7.1 Постановка задачи Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость. Исследование замкнутых АСР на ...

... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
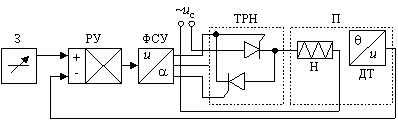
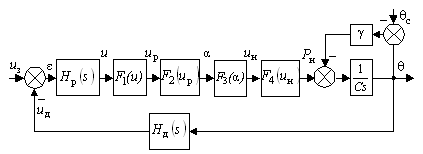
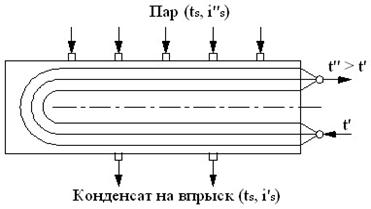
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
0 комментариев