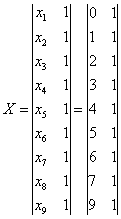
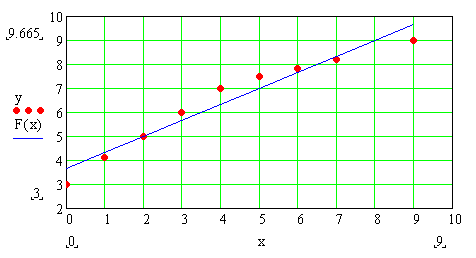
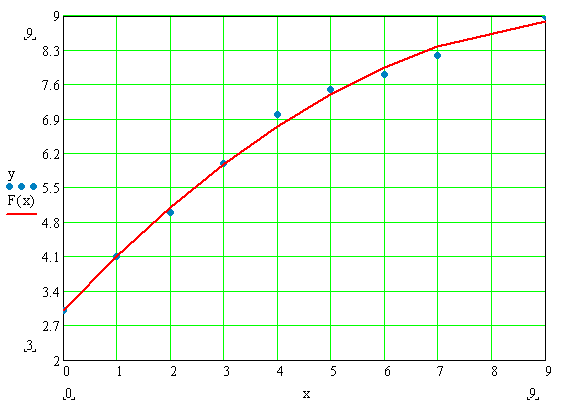
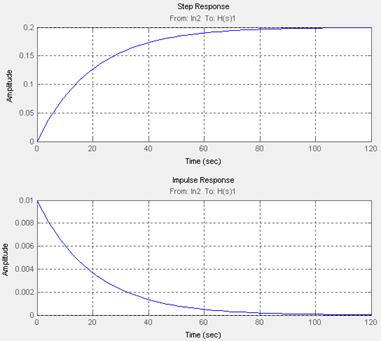
Построение статической характеристики объекта
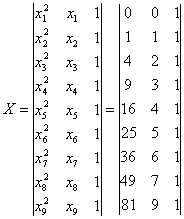
Аппроксимация полиномом второго порядка
Расчет коэффициентов передачи
Модель объекта первого порядка без запаздывания
Модель объекта первого порядка с запаздыванием
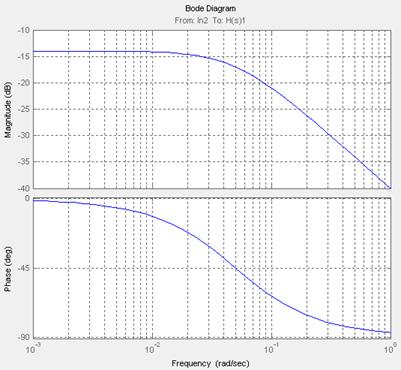
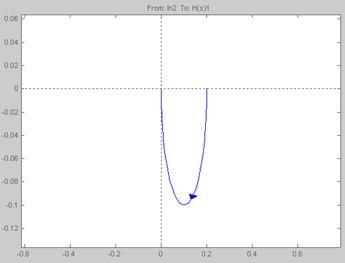
Построение математической модели
Выбор и расчет параметров настройки регуляторов
Расчет ПИ-регулятора
Обзор методов исследования на устойчивость
Проверка устойчивости по критерию Рауса
Проверка устойчивости по корням характеристического уравнения
Оценка качества функционирования АСР
Навигация
Проверка устойчивости по критерию Рауса
Автоматическая система регулирования с П-регулятором
45149
знаков
18
таблиц
55
изображений
8.2 Проверка устойчивости по критерию Рауса
В данной курсовой работе оценку устойчивости замкнутой системы автоматического регулирования произведем по критерию Рауса так как этот метод не предполагает нахождение определителей, а значит наименее трудоемок. Для проверки устойчивости по критерию Рауса заполним таблицы коэффициентов аналогично таблице 14.
Для системы с П-регулятором составим таблицу 15 подставив в соответствующие ячейки коэффициенты при р из знаменателя передаточной характеристики системы.
Таблица 15
Таблица Рауса для системы с П-регулятором
| 1 | - | An=0,179 | An-2=2,075 | An-4=2,157 |
| 2 | - | An-1=0,884 | An-3=4,176 | An-5=1,975 |
| 3 | Rn=0,202 | c13=1,395 | c23=1,736 | c33=0 |
| 4 | Rn-1=0,719 | c14=3,053 | c24=1,89 | c34=0 |
| 5 | Rn-2=0.422 | c15=0,873 | c25=0 | c35=0 |
| 6 | Rn-3=3,154 | c16=1,89 | c26=0 | c36=0 |
| 7 | Rn-4=0,468 | c17=0 | c27=0 | c37=0 |
Из таблицы 15 видно, что замкнутая система с П-регулятором устойчива так как выполняется необходимое условие устойчивости по критерию Рауса.
Аналогично составляем таблицы Рауса (табл. 16 и табл. 17) для замкнутых систем автоматического регулирования с И-регулятором и ПИ-регулятором соответственно.
Таблица 16
Таблица Рауса для системы с И-регулятором
| 1 | - | An=0.179 | An-2=2.229 | An-4=3.249 | An-6=0.284 |
| 2 | - | An-1=0.884 | An-3=3.663 | An-5=0.721 | 0 |
| 3 | Rn=0.202 | c13=1.487 | c23=3.103 | c33=0.284 | c43=0 |
| 4 | Rn-1=0.594 | c14=1.819 | c24=0.552 | c34=0 | c44=0 |
| 5 | Rn-2=0.818 | c15=2.651 | c25=0.284 | c35=0 | c45=0 |
| 6 | Rn-3=0.686 | c16=0.357 | c26=0 | c36=0 | c46=0 |
| 7 | Rn-4=7.419 | c17=0.284 | c27=0 | c37=0 | c47=0 |
| 8 | Rn-6=1.258 | c18=0 | c28=0 | c38=0 | c48=0 |
Таблица 17
Таблица Рауса для системы с ПИ-регулятором
| 1 | - | An=0,179 | An-2=2,127 | An-4=2,665 | An-6=0,392 |
| 2 | - | An-1=0,884 | An-3=3,959 | An-5=1,263 | 0 |
| 3 | Rn=0,202 | c13=1,325 | c23=2,409 | c33=0,392 | c43=0 |
| 4 | Rn-1=0,667 | c14=2,352 | c24=1,002 | c34=0 | c44=0 |
| 5 | Rn-2=0,563 | c15=1,845 | c25=0,392 | c35=0 | c45=0 |
| 6 | Rn-3=1,275 | c16=0,502 | c26=0 | c36=0 | c46=0 |
| 7 | Rn-4=3,677 | c17=0,392 | c27=0 | c37=0 | c47=0 |
| 8 | Rn-6=1,28 | c18=0 | c28=0 | c38=0 | c48=0 |
Из таблиц видно, что как система с И-регулятором, так и система с ПИ-регулятором устойчивы. Факт устойчивости систем подтверждает правильность расчета параметров регуляторов, так как этот расчет проводился из условия обеспечения устойчивости системы регулирования.
Похожие работы
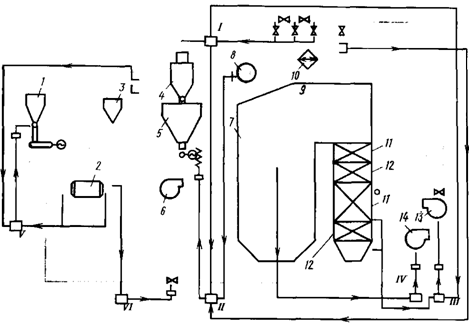
... свойства объекта управления остаются, практически неизменными. Поэтому изучение характеристик объекта управления относятся к одной из основных задач теории автоматического управления и регулирования. В данной курсовой работе Я разрабатываю АСР для молотковой дробилки типа ДДМ-1, в соответствии с требованием данной технологии. Обеспечить оптимальный режим работы в выборе типа регулятора и закона ...
... ИССЛЕДОВАНИЕ НА УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 7.1 Постановка задачи Система автоматического регулирования как динамическая система, характеризуется переходным процессом, возникающем в системе при нарушении ее равновесия любым возмущением. Основной динамической характеристикой системы регулирования является ее устойчивость или неустойчивость. Исследование замкнутых АСР на ...
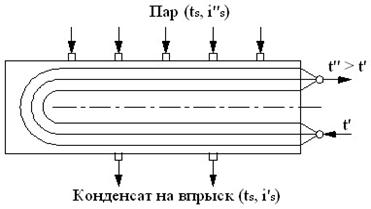

... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
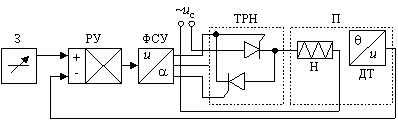
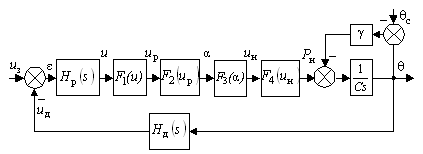
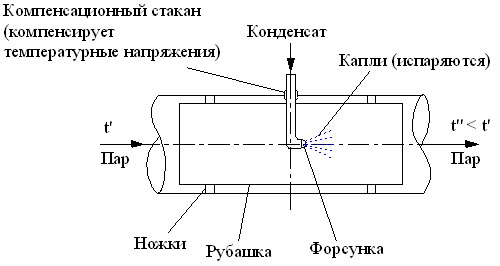
... , поддерживало температуру на нужном уровне. Установка требуемой температуры осуществляется с помощью задатчика (З). 1.2 Описание структурной схемы Рис. 2. Структурная схема автоматической системы регулирования температуры Входным сигналом системы является напряжение Uз, оно сравнивается с напряжением Uд ≈ Θ, которое действует на выходе датчика. Если Uз ≠ Uд, то ...
0 комментариев