Выбор наилучших вариантов засечки
Оценка ожидаемой точности полученных результатов
Выбор наилучших вариантов засечки
Оценка ожидаемой точности результатов
Вычисление и уравнивание дирекционного угла узловой стороны
Вычисление и уравнивание координат узловой точки
Уравнивание ходов технического нивелирования способом полигонов профессора В.В. Попова
Вычисление высот точек по ходам, по уравненным превышениям
Оценка точности полученных результатов
Навигация
Оценка ожидаемой точности полученных результатов
Уравнивание геодезических сетей сгущения упрощенным способом
30079
знаков
13
таблиц
2
изображения
1.5 Оценка ожидаемой точности полученных результатов
Я определила среднюю квадратическую ошибку положения точки для каждого варианта засечки по формуле:
 (3)
(3)
где mβ – средняя квадратическая ошибка измерения углов (в задании принимаем mβ=10''),
![]() - угол в треугольнике при точке Р,
- угол в треугольнике при точке Р,
S1, S2 – стороны засечки, м (определены по схеме),
![]() =206265''.
=206265''.
Среднюю квадратическую ошибку координат, полученных из двух вариантов засечки, нашла из формулы:
 (4).
(4).
углы γ нашла по определению, что сумма углов треугольника равна 180°: для АВР γ=180°-(88°56'20''+43°04'20'')=47°59'20''
для СВР γ=180°-(29°53'08''+91°03'39'')=59°03'13''
![]()
![]()
Из формулы (4) нащла среднюю квадратическую ошибку координат, полученных из двух вариантов засечки:
![]() м
м
Итак, в этой задаче я решила два варианта прямой многократной засечки и вычислила координаты дополнительного пункта. Расхождения координат, полученных в первом и втором вариантах засечки оказались в допуске, поэтому за окончательное значение координат исходного пункта Р я приняла Х=5310,455 и Y=3040,655. При оценке точности полученных результатов получила следующие ошибки:
- среднюю квадратическую ошибку положения торчки Р для каждого варианта засечки: mp1=0,079 м, mp2=0,064 м
- среднюю квадратическую ошибку координат, полученных из двух вариантов засечки: MpCp=0,051 м
2. Вычисление координат дополнительного пункта, определенного обратной многократной засечкой
2.1 Общие указания и исходные данные
Обратная засечка – это задача по определению четвертого пункта по трем данным пунктам и двум измеренным при определяемом пункте углам.
Для контроля правильности решения задачи при определяемой точке измеряют третий угол между направлениями на один из первых трех пунктов и на четвертый данный пункт.
Таким образом, для решения задачи с контролем необходимо видеть из определяемой точки четыре пункта исходной сети и измерить при определяемой точке три угла.
При решении задачи я воспользовалась исходными данными, исправленными с учетом порядкового номера, которые приведены в таблице 3.
Таблица 3 – Исходные данные для решения обратной засечки.
| название пункта | координаты | измеренные на пункте Р направления | |
| X | Y | ||
| 1 | 7105,31 | 3851,55 | 0 |
| 2 | 6613,86 | 3816,43 | 59 |
| 3 | 6653,66 | 2959,70 | 177 |
| 4 | 7353,17 | 3210,20 | 273 |
Порядок решения задачи:
1. составление схемы расположения определяемого и исходных пунктов
2. выбор наилучших вариантов засечки
3. решение наилучших вариантов засечки
4. оценка ожидаемой точности полученных результатов.
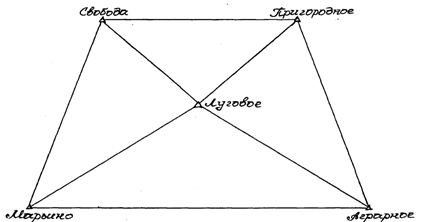
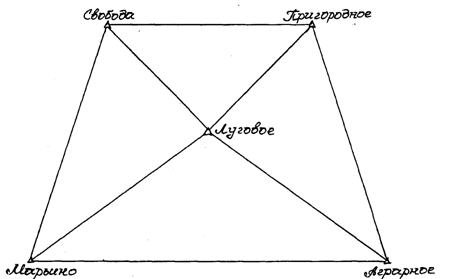
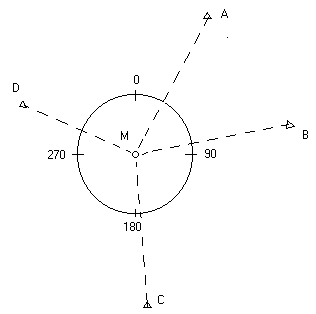
2.2 Составление схемы расположения определяемого и исходного пунктов
Составление схемы я произвела на листе миллиметровой бумаги формата А4. При этом оцифровала её в масштабе 1:10000. По координатам из таблицы 3 нанесла исходные пункты А, В, C, D (приложение Б). Искомый пункт Р нанесла по направлениям (по способу Болотова) на листе кальки формата А4 (приложение В).
Похожие работы
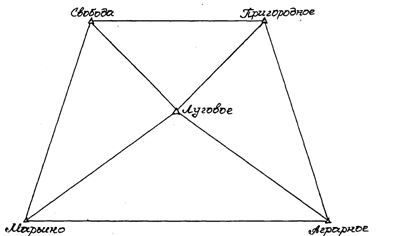
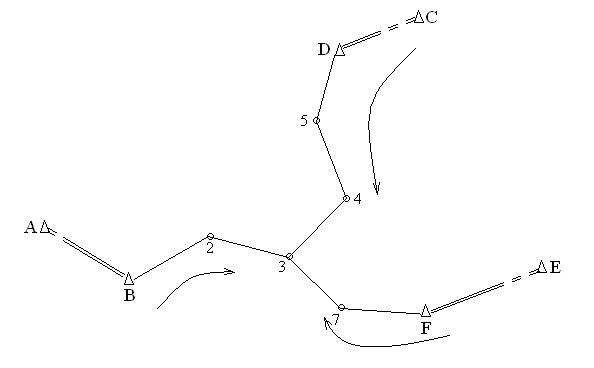
... 1 5008,50 1000,00 1753,45 2748,03 2376,28 72 º28'50'' 101 º12'25'' 351 º18'32'' Луговое Аграрное Свобода 2. Уравновешивание систем ходов плановой съемочной сети 2.1 Уравновешивание систем теодолитных ходов с одной узловой точкой 2.1.1 Задание Произвести уравновешивание систем теодолитных ходов, сходящихся в узловой точке 3 и опирающихся ...
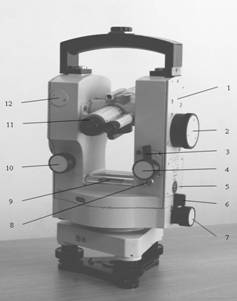
... с ценой деления 1 сек. Области применения: построение геодезических сетей сгущения (триангуляция 4 класса, полигонометрия IV класса), в прикладной геодезии (строительство, изыскания и т.д.), астрономо- геодезических измерениях (определение азимута по Солнцу и по Полярной Звезде). Модель 3Т5КП предназначена для измерения горизонтальных и вертикальных углов и не имеет микрометра. Области ...
... по формуле: ¦x=åDx-(xк-xн); ¦y=åDy-(yк-yн) сумма поправок приращений должна равнятся нулю. dxBC+dxCD+dXDE+¦x=0 dyBC+dyCD+dyDE+¦=0 4. Упрощенное уравнивание центральной системы. В центральной системе возникает условное уравнение фигур, горизонта и полюса. Математически эти условия выражаются уравнениями поправок. Число условных уравнений фигур ...




... в полосе съемке со смежных станций. В простейшем случае составление плана по результатам тахеометрической съемки начинают с построения координатной сетки и нанесению по координатам точек теодолитного хода. Правильность нанесения точек хода контролируют по длинам его сторон: измеряют расстояния между вершинами – выраженными в масштабе, они должны быть равны расстояниям между соответствующими ...
0 комментариев