Выбор наилучших вариантов засечки
Оценка ожидаемой точности полученных результатов
Выбор наилучших вариантов засечки
Оценка ожидаемой точности результатов
Вычисление и уравнивание дирекционного угла узловой стороны
Вычисление и уравнивание координат узловой точки
Уравнивание ходов технического нивелирования способом полигонов профессора В.В. Попова
Вычисление высот точек по ходам, по уравненным превышениям
Оценка точности полученных результатов
Навигация
Оценка ожидаемой точности результатов
Уравнивание геодезических сетей сгущения упрощенным способом
30079
знаков
13
таблиц
2
изображения
2.5 Оценка ожидаемой точности результатов
Далее я вычислила среднюю квадратическую ошибку положения определяемого пункта:
 (10),
(10),
где ![]() - средняя квадратическая ошибка измерения углов (10''),
- средняя квадратическая ошибка измерения углов (10''),
S – расстояния, измеренные по схеме, м,
![]() =
=![]() ,
, ![]() - углы, измеряемые транспортиром по схеме.
- углы, измеряемые транспортиром по схеме.
Среднюю квадратическую ошибку координат, полученных как средние значения из двух вариантов, вычислила по формуле:
 (11).
(11).
Из формулы (10) средняя квадратическая ошибка положения определяемого пункта:


Из формулы (11) нашла среднюю квадратическую ошибку координат, полученных как средние значения из двух вариантов:
![]()
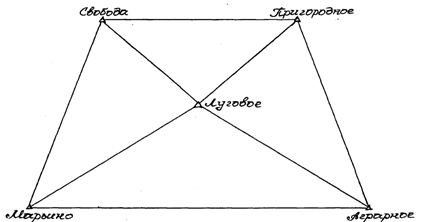
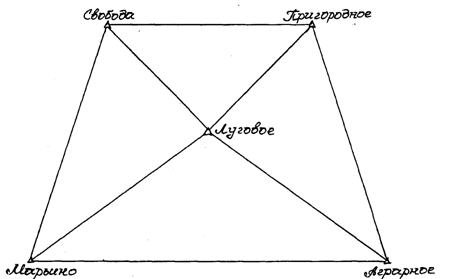
Итак, в этой задаче было решено два наилучших варианта засечки. Для решения задачи была построена схема расположения определяемого и исходных пунктов, выбраны наилучшие варианты засечки с помощью инверсионных треугольников, решены эти варианты засечки. Координаты пункта Р, полученные в двух вариантах, оказались в допуске и за окончательные значения координат были приняты их средние значения: среднее Х=6890,005 м, среднее Y=3400,585 м.
Вычисления были выполнены со следующими ошибками:
- средняя квадратическая ошибка положения определяемого пункта: mp1=0,036 м и mp2=0,031 м
- средняя квадратическая ошибка координат, полученных как средние значения из двух вариантов: МpСр=0,02 м
уравнивание геодезическая сеть сгущение засечка
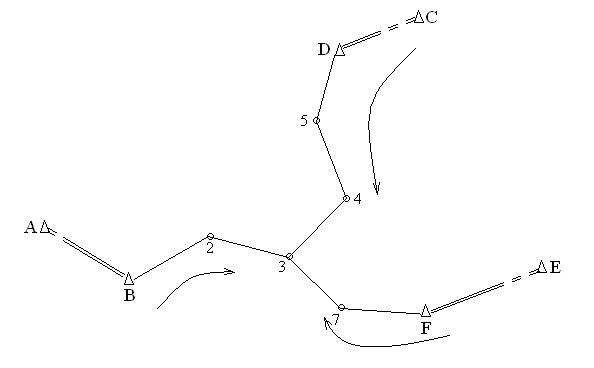
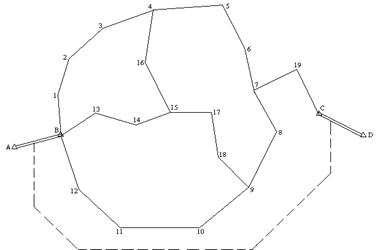
3. Уравнивание ходов полигонометрии второго разряда, образующих одну узловую точку
3.1 Общие указания и исходные данные
ПОЛИГОНОМЕТРИЯ (от греч. polygonos - многоугольный и ...метрия), метод определения взаимного положения точек земной поверхности для построения опорной геодезической сети путем измерения длин прямых линий, связывающих эти точки, и горизонтальных углов между ними. Применяется в залесенной и застроенной местности вместо триангуляции.
Наилучший результат получается при совместном уравнивании всех измеренных величин. Число измерений в полигонометрической сети велико, измеренные величины разнородны (углы и расстояния), сеть имеет сложную форму. Строгое уравнивание на практике выполняется чрезвычайно редко, так как представляет собой сложную и трудоёмкую задачу.
Задача уравнивания значительно облегчается при последовательном несовместном уравнивании. При этом сначала уравнивают углы, а затем приращения координат (абсцисс и ординат). Полученные таким образом результаты будут отличаться от результатов строгого уравнивания полигонометрической сети.
Заданием предусмотрено выполнить уравнивание системы ходов раздельным способом.
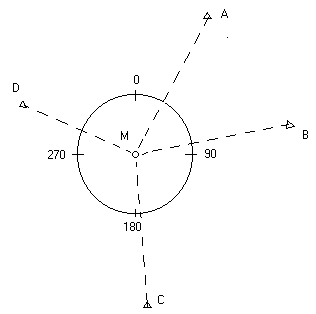
3.2 Вычисление координат исходных пунктов и дирекционных углов исходных направлений
По данным, изменённым в соответствии с порядковым номером, я вычислила координаты исходных пунктов и дирекционные углы исходных направлений. Вычисление произвела в таблице 7.
Таблица 7 – Данные по исходным пунктам.
пункт | углы | дирекционные углы | Сторона, м | Координаты, м | |||||
| град. | мин. | сек. | град. | мин. | сек. | X | Y | ||
| A | 43 | 54 | 55 | 2349486,73 | 9475377,12 | ||||
| 144 | 17 | 33 | 3301,47 | ||||||
| B | 103 | 52 | 34 | 2346805,92 | 9477304,01 | ||||
| 220 | 24 | 59 | 4296,16 | ||||||
| C | 32 | 12 | 31 | 2343535,03 | 9474518,65 | ||||
| 8 | 12 | 28 | 6013,30 | ||||||
| A | 43 | 54 | 55 | 2349486,73 | 9475377,12 | ||||
| 144 | 17 | 33 | |||||||
Дирекционные углы направлений ВС, СА были вычислены по формуле:
![]() (12),
(12),
приращения координат:
![]() и
и ![]() (13),
(13),
координаты исходных пунктов:
![]() и
и ![]() (14).
(14).
Похожие работы
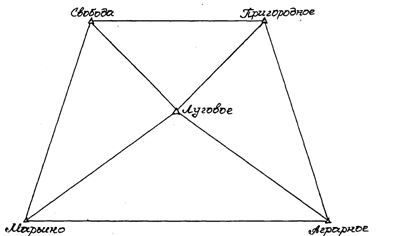
... 1 5008,50 1000,00 1753,45 2748,03 2376,28 72 º28'50'' 101 º12'25'' 351 º18'32'' Луговое Аграрное Свобода 2. Уравновешивание систем ходов плановой съемочной сети 2.1 Уравновешивание систем теодолитных ходов с одной узловой точкой 2.1.1 Задание Произвести уравновешивание систем теодолитных ходов, сходящихся в узловой точке 3 и опирающихся ...
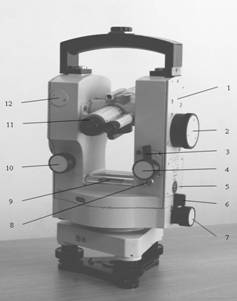
... с ценой деления 1 сек. Области применения: построение геодезических сетей сгущения (триангуляция 4 класса, полигонометрия IV класса), в прикладной геодезии (строительство, изыскания и т.д.), астрономо- геодезических измерениях (определение азимута по Солнцу и по Полярной Звезде). Модель 3Т5КП предназначена для измерения горизонтальных и вертикальных углов и не имеет микрометра. Области ...
... по формуле: ¦x=åDx-(xк-xн); ¦y=åDy-(yк-yн) сумма поправок приращений должна равнятся нулю. dxBC+dxCD+dXDE+¦x=0 dyBC+dyCD+dyDE+¦=0 4. Упрощенное уравнивание центральной системы. В центральной системе возникает условное уравнение фигур, горизонта и полюса. Математически эти условия выражаются уравнениями поправок. Число условных уравнений фигур ...




... в полосе съемке со смежных станций. В простейшем случае составление плана по результатам тахеометрической съемки начинают с построения координатной сетки и нанесению по координатам точек теодолитного хода. Правильность нанесения точек хода контролируют по длинам его сторон: измеряют расстояния между вершинами – выраженными в масштабе, они должны быть равны расстояниям между соответствующими ...
0 комментариев