Анализ технологического процесса и описание производственной установки
Расчетная схема механической части электропривода
Расчет нагрузок механизма на холостом ходу
Требования к автоматизированному электроприводу
Электропривод в будущем [9]
Печь ХПС-100 [10]
Регулирование скорости вращения АД введением добавочного сопротивления в цепь ротора
Регулирование скорости вращения АД изменением питающего напряжения
Выбор комплексного преобразователя
РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРОЦЕССОВ В ЭЛЕКТРОПРИВОДЕ
Выбор силовых диодов
Выбор силовых транзисторов
Выбор тормозного резистора
Математическое описание асинхронного электродвигателя в установившихся режимах
Расчет основных параметров для функциональной схемы САУ
Синтез регулятора момента
Построение статических характеристик электропривода
АНАЛИЗ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ
ВЫБОР И ПРОЕКТИРОВАНИЕ СИСТЕМЫ АВТОМАТИЗАЦИИ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
Разработка алгоритма управления
Разработка логической схемы
Выбор аппаратов
Проектирование защит
Выбрать закон регулирования и произвести пуск печи. Время нагрева печи должно быть не менее половины часа
Техника безопасности и охрана труда
ТЕХНИКО-ЭКОНОМИЧЕСКИЕ ПОКАЗАТЕЛИ
Определение эксплуатационных затрат
Навигация
Синтез регулятора момента
Схема автоматического регулирования продолжительности выпечки с коррекцией по температуре во второй зоне пекарной камеры
185428
знаков
38
таблиц
10
изображений
6.3 Синтез регулятора момента
По способу регулирования максимального момента электроприводы с асинхронными короткозамкнутыми двигателями можно разделить на две группы:
1) с независимым регулированием частоты;
2) с зависимым регулированием частоты.
При независимом регулировании частоты основными переменными являются амплитуда (![]() ) и частота (
) и частота (![]() ) подаваемого на статор напряжения (системы скалярного управления), а при зависимом –
) подаваемого на статор напряжения (системы скалярного управления), а при зависимом – ![]() и
и ![]() – частота тока ротора (системы векторного управления). В электроприводах с независимым управлением частотой регулирование максимального момента обычно осуществляется за счет изменения амплитуды напряжения при заданной частоте, причем частота, как правило, принимаются за независимую переменную. Регулирование, как правило, осуществляется в функции одной или нескольких переменных, а предельные реализации управляющих воздействий называют законами частотного регулирования.
– частота тока ротора (системы векторного управления). В электроприводах с независимым управлением частотой регулирование максимального момента обычно осуществляется за счет изменения амплитуды напряжения при заданной частоте, причем частота, как правило, принимаются за независимую переменную. Регулирование, как правило, осуществляется в функции одной или нескольких переменных, а предельные реализации управляющих воздействий называют законами частотного регулирования.
В реальных установках организовать управление по тому, или иному закону чисто программным способом невозможно, а поэтому вопрос выбора закона частотного регулирования необходимо решать не только с позиций достижимого результата, но прежде всего с позиции его регулируемости, которая, как правило, определяется возможностями программного обеспечения. Непосредственно измерить в асинхронной машине с короткозамкнутым ротором можно напряжение и ток статора и скорость ротора. При частичной разборке машины можно поместить на статор датчик ЭДС. Непосредственное же измерение момента на валу двигателя обычно не используется из=за сложностей с размещением датчиков и съемов сигналов. Формирование сигналов обратной связи по ЭДС с помощью датчиков тока и напряжения дает удовлетворительную точность при напряжении и токе, близких к синусоидальным. В противном случае векторное сравнение сигналов с различным гармоническим составом, меняющимся и от управляющего воздействия и от нагрузки, может привести к недопустимым погрешностям.
Наиболее просто в частотно-регулиремом электроприводе организовать измерение напряжения и тока статора. Но поскольку напряжение является регулируемой переменной, то использование таких сигналов компенсирует падение напряжения в вентильном преобразователе линеализует его регулировочную характеристику, но не определяет закона регулирования.
На основании вышесказанного для проектируемого электропривода выбираем систему стабилизации момента с положительной обратной связью по току [ 18].
Функциональная схема стабилизации максимального момента приведена на рис. 6.9.а, где: У – усилитель, ПЧ – преобразователь частоты, ДТ – датчик тока, а двигатель показан состоящим из двух частей М1 и М2. Поскольку нас интересует регулирование тока статора и момента при заданных uf и f1, то выход по скорости не показан.
Структурная схема контура тока в статистических режимах приведена на рис. 6.9.б, где: ![]() – коэффициент передачи преобразователя, по напряжению:
– коэффициент передачи преобразователя, по напряжению:
![]() ;
;
![]() – коэффициент передачи двигателя по току;
– коэффициент передачи двигателя по току;
![]() – коэффициент передачи датчика тока,
– коэффициент передачи датчика тока,
![]() ;
;
kу – коэффициент усиления регулятора момента.
На основании структурной схемы для тока статора можно записать:
 . (6.30)
. (6.30)
Из общего уравнения электромеханической характеристики (6.19) найдем:
![]() . (6.31)
. (6.31)
Подставив (6.31) в (6.30), получим уравнение электромеханической характеристики с положительной обратной связью в канале регулирования амплитуды напряжений:
 . (6.32)
. (6.32)
Подставив (6.32) в (6.20), запишем уравнение механической характеристики исследуемой системы:
 . (6.33)
. (6.33)
Уравнения (6.32), (6.33) неудобны для расчетов, поскольку содержат две независимые входные переменные u3 и ![]() . В то же время система управления частотно-регулируемым приводом строится таким образом, что без обратной связи обеспечивается пропорциональный закон регулирования
. В то же время система управления частотно-регулируемым приводом строится таким образом, что без обратной связи обеспечивается пропорциональный закон регулирования ![]() , а обратная связь корректирует закон изменения напряжения относительно частоты. В этом случае:
, а обратная связь корректирует закон изменения напряжения относительно частоты. В этом случае:
![]() ,
(6.35)
,
(6.35)
где: u3н – номинальный сигнал задания.
С учетом (6.35) перепишем (6.32) и (6.33):
 , (6.36)
, (6.36)
 . (6.37)
. (6.37)
Аналитическое определение коэффициента усиления весьма сложно, что обусловлено сложностью функции в знаменателе (6.37), а также тем, что на входе системы сравнивается сигнал управления скоростью с сигналом управления по току статора, в общем случае не зависящем от скорости, что требует функциональной зависимости ky(u3).
Однако расчеты можно упростить без существенного снижения качества синтезирующей системы, исходя из следующих соображений:
1) В реальных системах нет необходимости точно соблюдать условие Мк=Мдоп, а достаточно обеспечить Мк>Мтр во всем диапазоне регулирования ![]() , где Мдоп и Мтр – максимальный допустимый момент двигателя и требуемый по условию перегружаемости момент. Мдоп ограничивается насыщением магнитопровода машины.
, где Мдоп и Мтр – максимальный допустимый момент двигателя и требуемый по условию перегружаемости момент. Мдоп ограничивается насыщением магнитопровода машины.
2) При этом, даже если на отдельных уровнях ![]() будем иметь Мк>Мдоп, то перегрузки в автоматизированном электроприводе обычно снимают задержанными обратными связями и другими средствами внешней информационной системы.
будем иметь Мк>Мдоп, то перегрузки в автоматизированном электроприводе обычно снимают задержанными обратными связями и другими средствами внешней информационной системы.
3) Благодаря сочетанию свойства асинхронного двигателя терять перегружаемость при снижении ![]() и свойства положительной обратной связи по току увеличивать форсировку при снижении u3 появляется возможность отыскать такие оптимальные значения ky=const, при которых обеспечивается условие Мк>Мтр во всем диапазоне
и свойства положительной обратной связи по току увеличивать форсировку при снижении u3 появляется возможность отыскать такие оптимальные значения ky=const, при которых обеспечивается условие Мк>Мтр во всем диапазоне ![]() . Это подтверждают и функции в знаменателе (6.36) и (6.37), предельные значения которых будут
. Это подтверждают и функции в знаменателе (6.36) и (6.37), предельные значения которых будут
![]() и
и  .
.
С учетом сказанного определение искомых параметров будем выполнять по следующей схеме:
1. Исходя из условий ![]() и
и ![]() , строим механические характеристики для
, строим механические характеристики для ![]() , которые в дальнейшем будем называть естественными характеристиками частотно-регулируемого электропривода. Для построения используем (6.23) с подстановкой
, которые в дальнейшем будем называть естественными характеристиками частотно-регулируемого электропривода. Для построения используем (6.23) с подстановкой ![]() ,
, ![]() ,
, ![]() , предварительно найдя значения членов формулы:
, предварительно найдя значения членов формулы:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 . (6.38)
. (6.38)
Результаты расчета представлены в виде графика на рис.6.10.
2. Для этих же частот построим предельные по условиям насыщения механические характеристики с потокосцеплением Ψm=const, выбранным за предельное. Эти характеристики построим по формуле из [18] при условии Iμ=Iμн=const:
 , (6.39)
, (6.39)
где номинальный намагничивающий ток определен по (6.21):
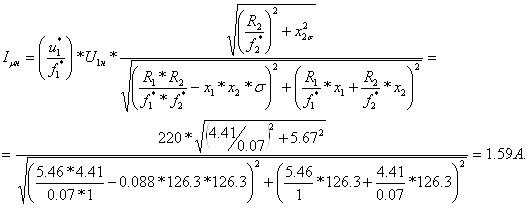
Результаты расчета представлены в виде графика (рис.6.10).
3.На характеристиках, соответствующих ![]() , проводим горизонталь ab (рис. 6.10), соответствующую
, проводим горизонталь ab (рис. 6.10), соответствующую
![]() .
.
Точкам любых характеристик с f1min=const, лежащих на линии ab, будет соответствовать условие ![]() .
.
4. На линии ab задаем Mтр=Mc<Mпред=Mн, т. е. Момент, обеспечивающий устойчивую работу электропривода на нижней скорости. По уравнению для механической характеристике при Ψm=const [18]:
![]() . (6.40)
. (6.40)
Найдем Iпред, соответствующее Mпред при ![]() на линии ab и выбранном Iμ:
на линии ab и выбранном Iμ:
 .
.
Учитывая, что при ![]() и
и ![]()
 , (6.41)
, (6.41)
найдем ток статора в расчетной точке:
 .
.
Подставив найденный ток в (6.36), найдем искомый коэффициент усиления ky:
Похожие работы
... работник, и автоматизированные, где контроль за безопасной работой и режимом тепловой обработки обеспечивает сам тепловой аппарат при помощи приборов автоматики. На предприятиях общественного питания тепловое оборудование может использоваться как несекционное или секционное, модулированное. Несекционное оборудование, это оборудование, которое различно по габаритам, конструктивному исполнению и ...
0 комментариев