Навигация
Системы спутниковой навигации ГЛОНАСС и GPS
48843
знака
2
таблицы
13
изображений
5. Системы спутниковой навигации ГЛОНАСС и GPS
Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях.
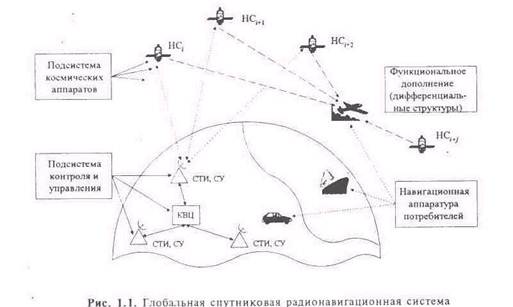
Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами).
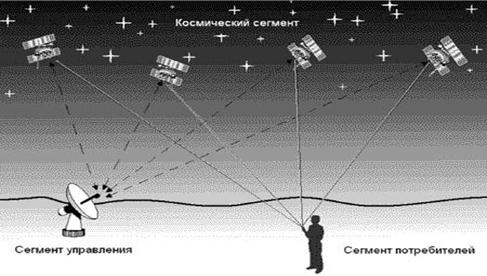
Рисунок 8
· космический сегмент, в который входит орбитальная группировка искусственных спутников Земли (иными словами, навигационных космических аппаратов);
· сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
· аппаратура пользователей системы.
Из этих трёх частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции – навигационных определений, – система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку. Кроме того, с её помощью можно производить определение ориентации объекта на основе измерений, производимых от четырёх приёмников сигналов навигационных спутников.
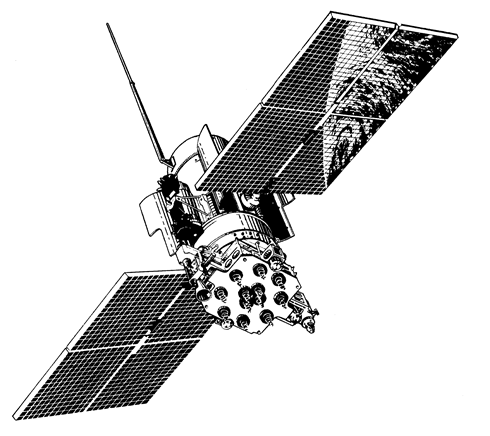
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км. Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут. Время эксплуатации спутника – 5 лет, за это время параметры его орбиты не должны отличаться от номинальных значений больше чем на 5%. Сам спутник представляет собой герметический контейнер диаметром 1,35 м и длиной 7,84 м, внутри которого размещается различного рода аппаратура. Питание всех систем производится от солнечных батарей. Общая масса спутника – 1415 кг. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.
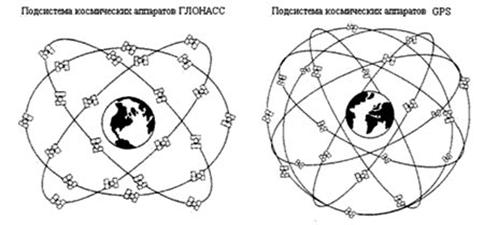
Рисунок 9
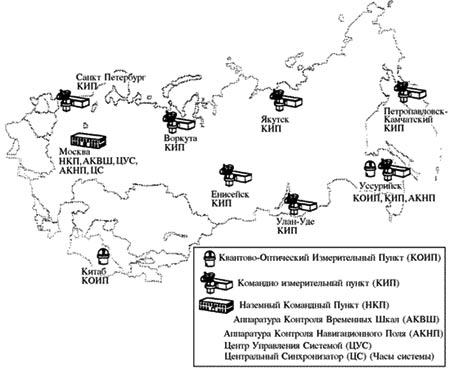
Рисунок 10а

Рисунок 10Б
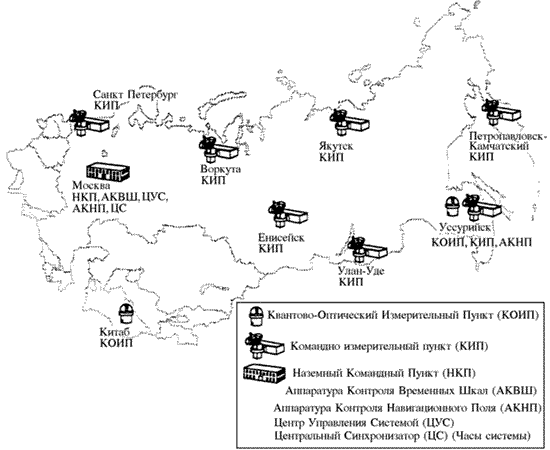
Сегмент наземного комплекса управления системы ГЛОНАСС выполняет следующие функции:
· эфемеридное и частотно-временное обеспечение;
· мониторинг радионавигационного поля;
· радиотелеметрический мониторинг НКА;
· командное и программное радиоуправление НКА.
Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10–13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10–14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3–5 нс.
Наземный сегмент обеспечивает эфемеридное обеспечение спутников. Это означает, что на земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определённый промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение, передаваемое спутником наряду с передачей навигационного сигнала. Сюда же входят частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения НКА производятся в Баллистическом центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости.
Американская система GPS по своим функциональным возможностям аналогична отечественной системе Глонасс. Её основное назначение – высокоточное определение координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Аналогично отечественной, система GPS разработана для Министерства Обороны США и находится под его управлением. Согласно интерфейсному контрольному документу, основными разработчиками системы являются:
· по космическому сегменту – Rockwell International Space Division, Martin Marietta Astro Space Division;
· по сегменту управления – IBM, Federal System Company;
· по сегменту потребителей – Rockwell International, Collins Avio-nics & Communication Division.
Как и система Глонасс, GPS состоит из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Как было сказано выше, орбитальная группировка GPS состоит из 28 навигационных космических аппаратов. Все они находятся на круговых орбитах с периодом обращения вокруг Земли, равным 12 часам. Высота орбиты каждого спутника равна ~ 20000 км. НКА системы GPS проходили ряд усовершенствований, которые сказывались на их характеристиках в целом. В таблице 1,2 приведены краткие характеристики космических аппаратов, используемых в системе.
Таблица 1 – характеристики космических аппаратов, используемых в системе GPS
| Тип НКА | Масса на орбите | Мощность энергоисточников, Вт | Расчётный срок активного существования | Год запуска первого НКА |
| Блок-I | 525 | 440 | - | 1978 |
| Блок-II | 844 | 710 | 5 | 1989 |
| Блок-IIR | 1094 | 1250 | 7,5 | 1997 |
| Блок-IIF | - | - | 14–15 | 2001–2002 |
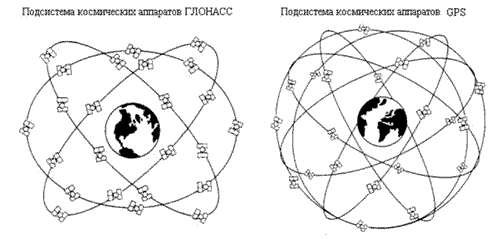
Таблица 2 – сравнительные характеристики систем ГЛОНАСС и GPS
| Показатель | ГЛОНАСС | GPS |
| Число КА в полной орбитальной группировке | 24 | 24 |
| Число орбитальных плоскостей | 3 | 6 |
| Число КА в каждой плоскости | 8 | 4 |
| Наклонение орбиты | 64,8º | 55º |
| Высота орбиты, км | 19 130 | 20 180 |
| Период обращения спутника | 11 ч. 15 мин. 44 с | 11 ч. 58 мин. 00 с |
| Система координат | ПЗ-90 | WGS-84 |
| Масса навигационного КА, кг | 1450 | 1055 |
| Мощность солнечных батарей, Вт | 1250 | 450 |
| Срок активного существования, лет | 3 | 7,5 |
| Средства вывода КА на орбиту | «Протон-К/ДМ» | Delta 2 |
| Число КА, выводимых за один запуск | 3 | 1 |
| Космодром | Байконур (Казахстан) | Мыс Канаверел (Cape Canaveral) |
| Эталонное время | UTC (SU) | UTC (NO) |
| Метод доступа | FDMA | CDMA |
| Несущая частота: L1 L2 | 1598,0625–1604,25 7/9 L1 | 1575,42 60/77 L1 |
| Поляризация | Правосторонняя | Правосторонняя |
| Тип псевдошумовой последовательности | m-последовательность | код Голда |
| Число элементов кода: C/A P | 511 51 1000 | 1023 2,35x1014 |
| Скорость кодирования, Мбит/с: C/A P | 0,511 5,11 | 1,023 10,23 |
| Уровень внутрисистемных радиопомех, дБ | -48 | -21,6 |
| Структура навигационного сообщения | ||
| Скорость передачи, бит/с | 50 | 50 |
| Вид модуляции | BPSK (Манчестер) | BPSK NRZ |
| Длина суперкадра, мин. | 2,5 (5 кадров) | 12,5 (25 кадров) |
| Длина кадра, с | 30 (15 строк) | 30 (5 строк) |
| Длина строки, с | 2 | 6 |
При проектировании системы в целом и НКА в частности, большое внимание уделяется вопросам автономного функционирования. Так, космические аппараты первого поколения (Блок-I) обеспечивали нормальную работу системы (имеется в виду, без существенных ошибок определения координат) без вмешательства сегмента управления в течение 3–4 дней. В аппаратах Блок-II этот срок был увеличен до 14 дней. В новой модификации НКА Блок-IIR позволяет автономно работать в течение 180 дней без корректировки параметров орбиты с земли, пользуясь лишь автономным комплексом взаимной синхронизации спутников. Аппараты Блок-IIF предполагается использовать взамен отработавших Блок-IIR.
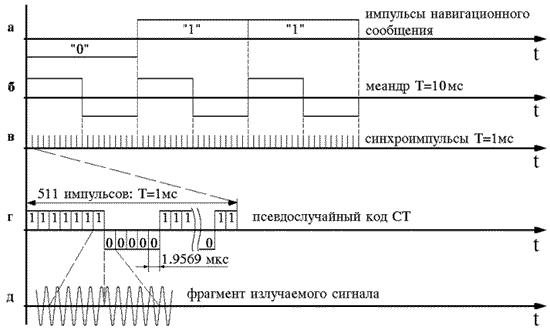
Состав и структура навигационных сообщений спутников системы ГлонассНавигационное сообщение формируется в виде непрерывно следующих строк, каждая длительностью 2 с. В первой части строки (интервал 1,7 с) передаются навигационные данные, а во второй (0,3 с) – Метка Времени. Она представляет собой укороченную псевдослучайную последовательность, состоящую из 30 символов с тактовой частотой 100 бит/с.
Навигационные сообщения спутников системы Глонасс необходимы потребителям для навигационных определений и планирования сеансов связи со спутниками. По своему содержанию навигационные сообщения делятся на оперативную и неоперативную информацию.
Оперативная информация относится к спутнику, из сигнала которого она была получена. К оперативной информации относят:
· оцифровку меток времени;
· сдвиг шкалы времени спутника относительно шкалы системы;
· относительное отличие несущей частоты спутника от номинального значения;
· эфемеридная информация.
Время привязки эфемеридной информации и частотно-временные поправки, имеющие получасовую кратность от начала суток, позволяют точно определять географические координаты и скорость движения спутника.
Неоперативная информация содержит альманах, включающий:
· данные о состоянии всех спутников системы;
· сдвиг шкалы времени спутника относительно шкалы системы;
· параметры орбит всех спутников системы;
· поправку к шкале времени системы Глонасс.
Выбор оптимального «созвездия» КА и прогноза доплеровского сдвига несущей частоты обеспечивается за счёт анализа альманаха системы.
Навигационные сообщения спутников системы Глонасс структурированы в виде суперкадров длительностью 2,5 мин. Суперкадр состоит из пяти кадров длительностью 30 с. Каждый кадр содержит 15 строк длительностью 2 с. Из 2 с длительности строки последние 0,3 с занимает метка времени. Остальная часть строки содержит 85 символов цифровой информации, передаваемых с частотой 50 Гц.
В составе каждого кадра передаётся полный объём оперативной информации и часть альманаха системы. Полный альманах содержится во всём суперкадре. При этом информация суперкадра, содержащаяся в строках 1–4, относится к тому спутнику, с которого она поступает (оперативная часть), и не меняется в пределах суперкадра.
Каждый спутник использует свойственные только ему дальномерные коды С/A и Р(Y), что и позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала.
Состав и структура навигационных сообщений спутников системы GPSСтруктурное деление навигационной информации спутников системы GPS осуществляется на суперкадры, кадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12,5 мин). Один кадр передаётся в течение 30 с и имеет размер 1500 бит. Кадр разделён на 5 подкадров по 300 бит и передаётся в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу / окончанию очередного 6-с интервала системного времени GPS. Подкадр состоит из 10 30-бит слов. В каждом слове 6 младших разрядов являются проверочными битами. В 1-, 2- и 3-м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид КА, с которым установлена связь. Содержание и структура этих подкадров остаются неизменными на всех страницах суперкадра. В 4- и 5-м подкадрах содержится информация о конфигурации и состоянии всех КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее.
Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналовК сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части:
· радиочастотную часть;
· цифровой~коррелятор;
· процессор.
С выхода антенно-фидерного устройства (антенны) сигнал поступает на радиочастотную часть (рисунок 11). Основная задача этой части заключается в усилении входного сигнала, фильтрации, преобразовании частоты и аналого-цифровом преобразовании. Помимо этого, с радиочастотной части приёмника поступает тактовая частота для цифровой части приёмника. С выхода радиочастотной части цифровые отсчёты входного сигнала поступают на вход цифрового коррелятора.
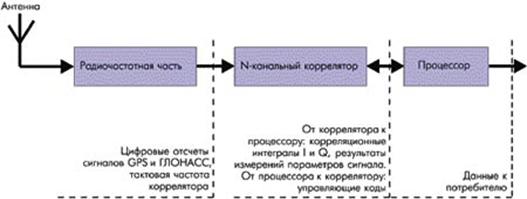
Рисунок 11
В корреляторе спектр сигнала переносится на «нулевую» частоту. Это производится путём перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. Далее результат перемножения проходит корреляционную обработку путём перемножения с опорным дальномерным кодом и накоплением на периоде дальномерного кода. В итоге получаем корреляционные интегралы I и Q. Отсчёты корреляционных интегралов поступают в процессор для дальнейшей обработки и замыкания петель ФАП (фазовая автоподстройка) и ССЗ (схема слежения за задержкой). Измерения параметров сигнала в приёмнике производятся не непосредственно по входному сигналу, а по его точной копии, формируемой системами ФАП и ССЗ. Корреляционные интегралы I и Q позволяют оценить степень «похожести» (коррелированности) опорного и входного сигналов. Задача коррелятора, помимо формирования интегралов I и Q, – формировать опорный сигнал, согласно с управляющими воздействиями (кодами управления), поступающими с процессора. Кроме того, в некоторых приёмниках коррелятор формирует необходимые измерения опорных сигналов и передаёт их в процессор для дальнейшей обработки. В то же время, так как опорные сигналы в корреляторе формируются по управляющим кодам, поступающим с процессора, то необходимые измерения опорных сигналов можно производить непосредственно в процессоре, обрабатывая соответствующим образом управляющие коды, что и делается во многих современных приёмниках.
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения до измерительного пункта. В навигационных системах GPS/ГЛОНАСС излучение сигналов синхронизировано со шкалой времени системы, точнее, со шкалой времени спутника, излучающего данный сигнал. В то же время, потребитель имеет информацию о расхождении шкалы времени спутника и системы. Цифровая информация, передаваемая со спутника, позволяет установить момент излучения некоторого фрагмента сигнала (метки времени) спутником в системном времени. Момент приёма этого фрагмента определяется по шкале времени приёмника. Шкала времени приёмника (потребителя) формируется с помощью кварцевых стандартов частоты, поэтому наблюдается постоянный «уход» шкалы времени приёмника относительно шкалы времени системы. Разность между моментом приёма фрагмента сигнала, отсчитанным по шкале времени приёмника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженная на скорость света, называется псевдодальностью. Почему псевдодальностью? Потому что она отличается от истинной дальности на величину, равную произведению скорости света на «уход» шкалы времени приёмника относительно шкалы времени системы. При решении навигационной задачи этот параметр определяется наравне с координатами потребителя (приёмника).
Корреляционные интегралы, формируемые в корреляторе, позволяют отследить модуляцию сигнала спутника символами информации и вычислить метку времени во входном сигнале. Метки времени следуют с периодичностью 6 с для GPS и 2 с для ГЛОНАСС и образуют своеобразную 6 (2) – секундную шкалу. В пределах одного деления этой шкалы периоды дальномерного кода образуют 1-мс шкалу. Одна миллисекунда разделена, в свою очередь, на отдельные элементы (chips, в терминологии GPS): для GPS – 1023, для ГЛОНАСС – 511. Таким образом, элементы дальномерного кода позволяют определить дальность до спутника с погрешностью ~ 300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0,01 периода, что составляет точность определения псевдодальности 3 м.
На основании измерений параметров опорного гармонического колебания, формируемого системой ФАП, определяют частоту и фазу несущего колебания спутника. Его уход относительно номинального значения даст доплеровское смещение частоты, по которому оценивается скорость потребителя относительно спутника. Кроме того, фазовые измерения несущей позволяют уточнить дальность до спутника с погрешностью в несколько мм.
Определение координат потребителяДля определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей модели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полёта КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задаётся узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним.
В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскулирующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе Глонасс для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации.
Как было сказано выше, для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приёмнике с точностью около 1 м. Для удобства рассмотрим простейший «плоский» случай, представленный на рисунке 12.
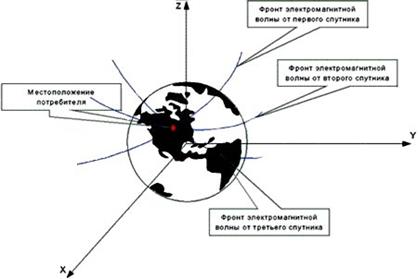
Рисунок 12
Каждый спутник можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель.
Высота орбит спутников составляет порядок 20000 км. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе.
Дифференциальный режимСпутниковые навигационные системы позволяют потребителю получить координаты с точностью порядка 10–15 м. Однако для многих задач, особенно для навигации в городах, требуется большая точность. Один из основных методов повышения точности определения местонахождения объекта основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 3 м в динамической навигационной обстановке и до 1 м – в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приёмника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приёмник. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными, опорная станция вычисляет поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
Аппаратура потребителя принимает от опорной станции дифференциальные поправки и учитывает их при определении местонахождения потребителя.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. По экспериментальным данным, опорную станцию рекомендуется располагать не далее 500 км от объекта.
В настоящее время существуют множество широкозонных, региональных и локальных дифференциальных систем.
В качестве широкозонных стоит отметить такие системы, как американская WAAS, европейская EGNOS и японская MSAS. Эти системы используют геостационарные спутники для передачи поправок всем потребителям, находящимся в зоне их покрытия.
Региональные системы предназначены для навигационного обеспечения отдельных участков земной поверхности. Обычно региональные системы используют в крупных городах, на транспортных магистралях и судоходных реках, в портах и по берегу морей и океанов. Диаметр рабочей зоны региональной системы обычно составляет от 500 до 2000 км. Она может иметь в своём составе одну или несколько опорных станций.
Локальные системы имеют максимальный радиус действия от 50 до 220 км. Они включают обычно одну базовую станцию. Локальные системы обычно разделяют по способу их применения: морские, авиационные и геодезические локальные дифференциальные станции.
Похожие работы
... КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части ...
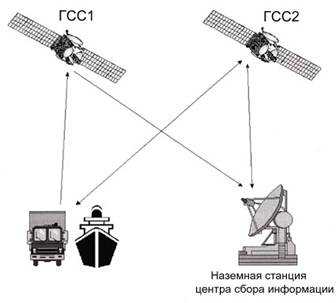
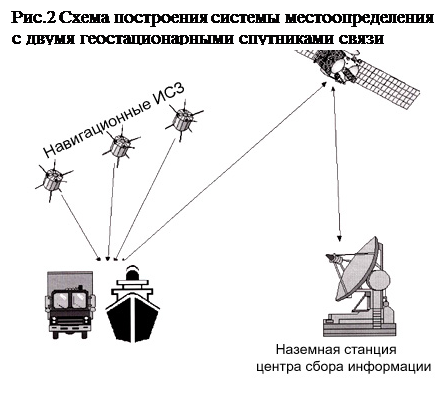


... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
... , используют радиально-скоростные методы. 5. СРНС ГЛОНАСС 5.1. Структура и основные характеристики Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения вектора скорости движения, а также времени космических, авиационных, ...

... " компьютерные модели эпидемических процессов, которые вместе с информационными моделями составляют "интеллектуальное ядро" ГИС нового класса. 4. Знакомимся с ДубльГИС Одной из самых распространенных социально-направленных ГИС является ДубльГИС. [5]ДубльГИС — бесплатный электронный справочник предприятий с интерактивной картой города. Выпускается одноимённой фирмой и её франчайзи в 35 ...
0 комментариев