Навигация
2.2 Наземный сегмент
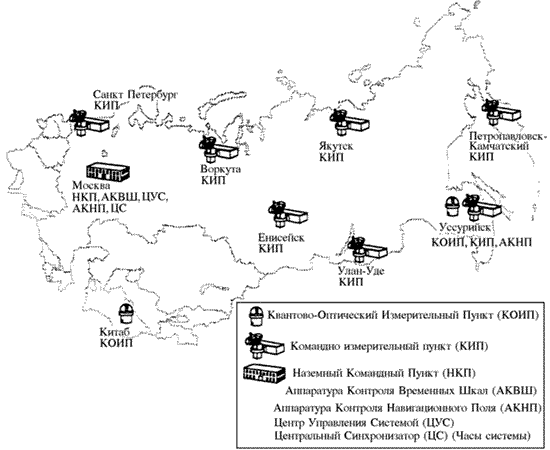
Наземный сегмент системы GPS состоит из 5-и контрольных станций и главной станции управления, расположенных на военных базах США – на островах Кваджалейн и Гавайях в Тихом океане, на острове Вознесенья, на острове Диего-Гарсия в Индийском океане и в Колорадо-Спрингс, они преведены на рисунке 1. В задачи станций мониторинга входит прием и измерение навигационных сигналов поступающих с GPS спутников, вычисление различного рода ошибок и передача этих данных на станцию управления. Совместная обработка полученных данных позволяет вычислить отклонение траекторий спутников от заданных орбит, временные сдвиги бортовых часов и ошибки в навигационных сообщениях. Мониторинг состояния GPS спутников происходит практически непрерывно. «Загрузка» навигационных данных, состоящих из прогнозируемых орбит и поправок часов для каждого из спутников, осуществляется каждые 24 часа, в момент, когда он находится в зоне доступа станции управления.
В дополнение к наземным GPS станциям существует несколько частных и государственных сетей слежения, которые выполняют измерения навигационных GPS сигналов для уточнения параметров атмосферы и траекторий движения спутников.

Рисунок 1
2.3 Аппаратура пользователей
Под аппаратурой пользователя подразумевают навигационные приемники, которые используют сигнал со спутников GPS для вычисления текущей позиции, скорости и времени. Пользовательскую аппаратуру можно разделить на «бытовую» и «профессиональную». Во многом этом разделение условное, так как иногда достаточно трудно определить, к какой категории следует отнести GPS приемник и какие критерии при этом использовать. Есть целых класс GPS навигаторов, использующихся в пеших походах, автомобильных путешествиях, на рыбалке и т.п. Есть авиационные и морские навигационные системы, которые зачастую входят в состав сложных навигационных комплексов. В последнее время широкое распространение получили GPS чипы, которые интегрируются в КПК, телефоны и другие мобильные устройства.
Поэтому в навигации большее распространение получило деление GPS приемников на «кодовые» и «фазовые». В первом случае, для вычисления позиции используется информация, передаваемая в навигационных сообщениях. К этой категории относится большинство недорогих GPS навигаторов, стоимостью 100–2000 долларов.
Вторая категория навигационных GPS приемников использует не только данные, содержащиеся в навигационных сообщениях, но и фазу несущего сигнала. В большинстве случаев это дорогостоящие одно- и двухчастотные (L1 и L2) геодезические приемники, способные вычислять позицию с относительной точностью в несколько сантиметров и даже миллиметров. Такая точность достигается в RTK режиме, при совместной обработке измерений GPS приемника и данных базовой станции. Стоимость таких устройств может составлять десятки тысяч долларов.
3. Работа GPS-навигатора
Основной принцип, лежащий в основе всей системы GPS, прост и давно используется для навигации и ориентирования: если вы точно знаете местоположение какого-либо реперного ориентира и расстояние до него, то можно начертить окружность (в 3-х мерном случае – сферу), на которой должна быть расположена точка вашего положения. На практике, если вышеуказанное расстояние, т.е. радиус, достаточно велик, то можно заменить дугу окружности отрезком прямой линии. Если провести несколько таких линий, соответствующих разным реперным ориентирам, то точка их пересечения укажет ваше местоположение. В GPS роль таких реперов играют две дюжины спутников, движущихся каждый по своей орбите на высоте ~ 17 000 км над поверхностью Земли. Скорость их движения весьма велика, однако параметры орбиты и их текущее местонахождение с высокой точностью известны бортовым компьютерам. Важной частью любого GPS-навигатора является обычный приемник, работающий на фиксированной частоте и постоянно «прослушивающий» сигналы, передаваемые этими спутниками. Каждый из спутников постоянно излучает радиосигнал, в котором содержатся данные о параметрах его орбиты, состоянии бортового оборудования и о точном времени. Изо всей этой информации данные о точном бортовом времени являются наиболее важными: GPS-приемник с помощью встроенного процессора вычисляет промежуток времени между посылкой и получением сигнала, затем умножает его на скорость распространения радиоволн и т.о. узнает расстояние между спутником и приемником.
3.1 Нестабильность часов приемника
Из описанного выше принципа видно, что для определения местоположения достаточно поймать сигналы от двух спутников и построить две пересекающиеся прямые. Однако на практике точность такого метода была бы недостаточной из-за наличия ошибки часов приемника. Дело в том, что спутники, находящиеся на орбите, имеют на борту очень точные и, естественно, дорогостоящие атомные часы. Что же касается GPS-приемников, особенно бытовых, то использование таких часов было бы неоправдано в смысле габаритов и стоимости. Это было одной из серьезных проблем, с которыми столкнулись разработчики – ведь неточность хода часов всего в одну тысячную секунды приводила бы к ошибке более 250 км! Для решения этой проблемы и для возможности использования в GPS-приемниках обычных кварцевых часов (аналогичных тем, которые используются в быту) было предложено использовать не два, а три реперных ориентира, т.е. три пересекающиеся прямые. Как же это работает?
Предположим, что часы GPS-радиоприемника немного спешат, т.е. измеренное время прохождения радиоволн будет больше реального. Это означает, что обе расчитанные линии, и, следовательно, точка их пересечения будут находиться на большем расстоянии от ориентиров (спутников), чем на самом деле. Если же часы отстают, то точка пересечения переместится ближе к спутникам. Возмем теперь третий ориентир (спутник). Легко видеть, что пересечение трех линий даст нам треугольник, размеры и положение которого могут меняться в зависимости от хода часов. Более того, учитывая, что неточность часов для всех трех сигналов будет практически одинаковой, можно автоматически подобрать такую величину коррекции, которая обеспечит пересечение всех трех линий в одной искомой точке.
Похожие работы
... КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части ...
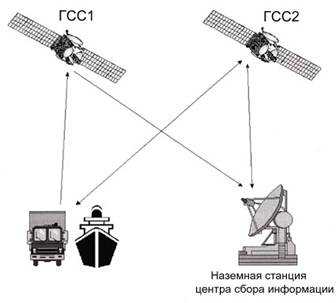
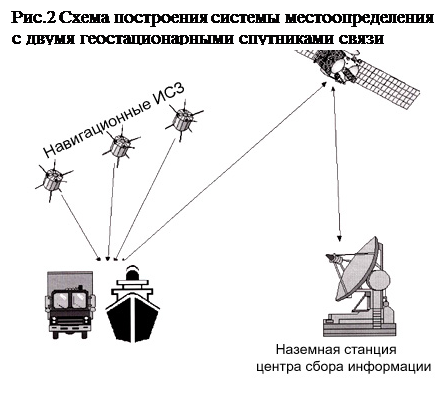


... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
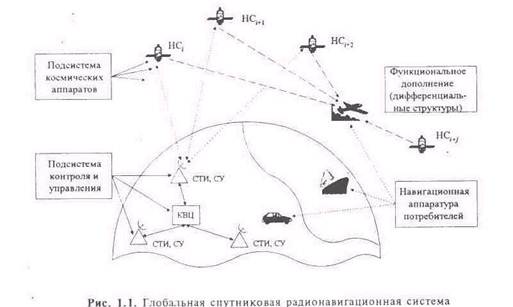
... , используют радиально-скоростные методы. 5. СРНС ГЛОНАСС 5.1. Структура и основные характеристики Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения вектора скорости движения, а также времени космических, авиационных, ...

... " компьютерные модели эпидемических процессов, которые вместе с информационными моделями составляют "интеллектуальное ядро" ГИС нового класса. 4. Знакомимся с ДубльГИС Одной из самых распространенных социально-направленных ГИС является ДубльГИС. [5]ДубльГИС — бесплатный электронный справочник предприятий с интерактивной картой города. Выпускается одноимённой фирмой и её франчайзи в 35 ...
0 комментариев