Навигация
3.2 Принцип действия GPS
Принцип действия спутниковой GPS навигации основан на определении расстояния от текущего положения до группы спутников. Точное местоположение GPS спутников известно из данных эфемерид и альманаха, передаваемых в навигационных сообщениях. Зная расстояние до трех спутников, можно определить текущее местоположение, как точку пересечение трёх окружностей (рисунок 2). Расстояние до спутников определяется простым уравнением
R = t × c,
где t – время распространения радиосигнала от спутника до наблюдателя, а с – постоянная величина, равная скорости света. Соответственно, зная время, за которое сигнал дошел от спутника до GPS приемника и, умножив ее на скорость света, можно определить расстояние.
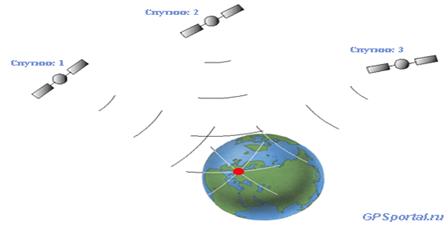
Рисунок 2
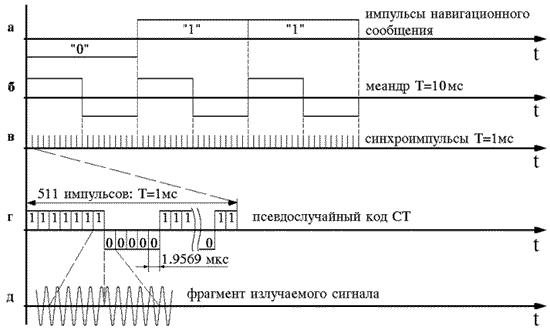
Чтобы определить момент, в который сигнал был «отправлен» со спутника, навигационное сообщение модулируется «псевдошумовым» PRN-кодом, соответствующим номеру спутника. Аналогичная последовательность генерируется в GPS приемнике в строгой временной синхронизации с кодом спутника. Принятый со спутника код сравнивается с кодом приемника, и определяется «как давно» в приемнике была сгенерирована схожая последовательность. Выявленный таким образом сдвиг одного кода по отношению к другому будет соответствовать времени прохождения сигналом расстояния от спутника до приемника. Преимуществом кодовых посылок является то, что измерения временного сдвига могут быть проведены в любой момент времени.
Стоит отметить, что для точного вычисления расстояния часы GPS приемника и GPS спутника должны быть синхронизированы с высокой точностью. Потому что отличие даже в несколько микросекунд приводят к ошибке в несколько десятков километров, а это в свою очередь вносит погрешность в вычисление позиции.
Но если на GPS спутниках установлены атомные часы, имеющие очень высокую точность и стоимость которых составляет несколько сотен тысяч долларов, то в обычных GPS навигаторах использование таких дорогих источников частоты просто невозможно. В GPS навигаторах используются недорогие кварцевые генераторы, которые имеют существенно меньшую точность. Поэтому для вычисления «уходов» кварца при решении навигационной задачи используются измерения 4-го спутника. Фактически, получается задача с 4-мя неизвестными – координатами X, Y, Z и временем T. Именно по этой причине измеренное расстояние до спутников называют «псевдодальностью», подразумевая, что оно содержит ошибку связанную с неточностью часов. В настоящее время, многоканальные GPS навигаторы одновременно отслеживают до 8–10 спутников, что позволяет быстро решить большинство неоднозначностей.
Информацию о местоположении спутников GPS приемники получают из передаваемых в навигационных сообщений данных альманаха и эфемерид. Альманах содержит информацию о расположение спутников «на небе», что позволяет при очередном включении GPS прибора значительно сузить секторы поиска навигационного сигнала и уменьшить время его «захвата». Точные координаты спутников вычисляются на основании данных эфемерид. В отличие от альманаха, спутник передает только данные «своих» эфемерид, поэтому для его использования в подсчете позиции, GPS приемник должен получить полное навигационное сообщение. Ошибки передачи, связанные с «плохими» окружающими условиями, могут существенно увеличить время фиксации позиции. Наличие в памяти данных альманаха и эфемерид позволяет GPS приемнику определять позицию за 1–2 секунды. Этот режим называется «горячим» стартом.
Геометрический фактор определяет относительное расположение GPS приемника и спутников, используемых в подсчете позиции. Его величина влияет на точность определения позиции. Если все спутники расположены в одном направлении от GPS приемника, то площадь пересечения всех окружностей будет достаточно большой. Эта площадь характеризует величину неопределенности измерений, влияющих на точность подсчёта и позиции (рисунок 3).
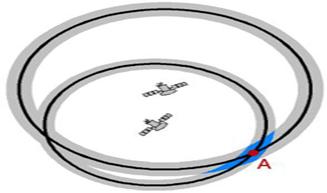
Рисунок 3
В случае, когда спутники расположены «вокруг» GPS приемника, область пересечений окружностей и соответственно величина неопределённостей умньшаются (рисунок 4).
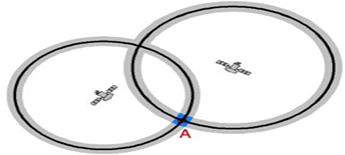
Рисунок 4
3.3 Точность системы
Учитывая вышесказанное, мы видим, что для устранения нестабильности хода часов приемника и определения точного местоположения в двумерном пространстве (т.е. по широте и долготе) нам необходимо получить сигналы мимнимум от 3-х спутников. К счастью, сегодня количество GPS-спутников достаточно велико даже для того, чтобы в любой точке земного шара определить не только двумерные, но и трехмерные координаты – широту, долготу и высоту над уровнем моря. Для этого нужно получать сигналы минимум от 4-х спутников. При этом, чем больше спутников «видит» Ваш GPS – приемник, тем точнее он может определить координаты местоположения – вплоть до максимального предела, определяемого точностью системы. Из этого, в частности, следует, что точность работы GPS-навигатора снижается, если сигналы от некоторых спутников экранируются местными предметами (рельефом местности, деревьями с плотной кроной, высокими зданиями и т.п.).
Как известно, спутниковая GPS-система оплачивается и находится под контролем Департамента обороны США, который зарезервировал предельную точность исключительно для своих военных целей. Для этого передаваемый спутниками сигнал кодируется с помощью специального Р-кода, который может быть декодирован только военными GPS-приемниками. В дополнение к этому, в сигналы времени от спутниковых атомных часов добавляется случайная ошибка, которая искажает полученные значения координат. В результате точность гражданских GPS-премников ухудшается более чем в 10 раз по сравнению с военными и составляет около 50–150 м.
В действительности, на практике все выглядит несколько сложнее, чем в теории. Это объясняется влиянием на GPS измерения различного рода ошибок. Можно выделить три категории ошибок (рисунок 5):
· Ошибки системы.
· Ошибки связанны с распространением навигационного сигнала.
· Ошибки приемной аппаратуры.
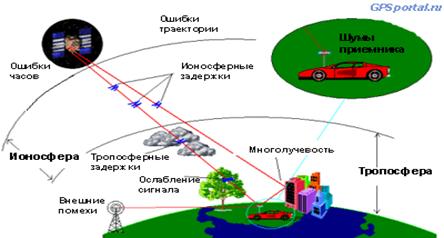
Рисунок 5
Ошибки системы связаны точностью атомных часов спутников и соответствием реальной траектории спутников заданной орбите. Несмотря на то, что в каждом GPS спутнике используются высокоточные атомные часы, они тоже могут содержать ошибки и отклоняться от истинного значения системного эталона времени. Отклонение в 30 нс ведет к ошибке определения расстояния в 10 метров. Поэтому, все отклонения бортовых часов отслеживаются и их значения передаются в составе навигационных сообщений и учитываются GPS приемником в вычислениях позиции.
Второй тип системных ошибок связан с неточностью передаваемых эфемерид. В математической модели учитываются множество факторов, влияющих на изменение траектории орбит GPS спутников, но небольшие ошибки все равно присутствуют.
Наиболее существенный вклад в навигационные измерения вносят ошибки, связанные с распространением сигнала атмосфере Земли, а именно в ионосферных и тропосферных ее слоях. Ионосфера Земли представляет собой слой заряженных частиц на высоте от 120 до 200 км. Эти частицы снижают скорость распространения сигнала, и, следовательно, увеличивают его время. Соответственно вносится ошибка в оценку расстояния от GPS приемника до спутника. Эти задержки могут быть смоделированы для разного времени суток, усреднены и внесены в измерения, но, к сожалению, эти модели не могут точно отобразить реальную ситуацию. После прохождения ионосферного слоя, навигационный сигнал попадает в тропосферный слой, в котором происходят все погодные явления и присутствуют водяные пары, также влияющее на скорость распространения сигнала. Для борьбы с ионосферными задержками используют дифференциальные метод определения позиции. Корректирующие поправки передаются с помощью геостационарных спутников WAAS/EGNOS и позволяют повысить точность позиционирования до 1 метра.
Ошибки многолучевости можно одновременно отнести и к категории ошибок, связанных с распространением навигационного GPS сигнала, и к ошибкам GPS приемника. Ошибка многолучевости связана с переотражением навигационного сигнала от близкорасположенных объектов – зданий, металлических конструкций, деревьев и т.п. (рисунок 6). В результате этого эффекта время распространения отраженного сигнала превышает время «прямого» сигнала. Если уровень переотраженного сигнала выше уровня «прямого» сигнала, то происходит ошибочный «захват», и в результате, вносится ошибка в вычисления расстояния до спутника.
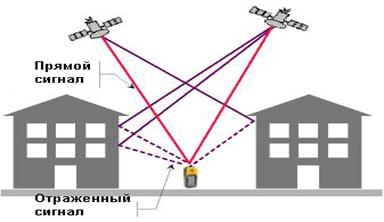
Рисунок 6
Похожие работы
... КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части ...
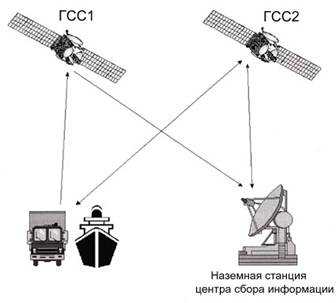


... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
... , используют радиально-скоростные методы. 5. СРНС ГЛОНАСС 5.1. Структура и основные характеристики Отечественная сетевая среднеорбитальная СРНС ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) предназначена для непрерывного и высокоточного определения пространственного (трехмерного) местоположения вектора скорости движения, а также времени космических, авиационных, ...

... " компьютерные модели эпидемических процессов, которые вместе с информационными моделями составляют "интеллектуальное ядро" ГИС нового класса. 4. Знакомимся с ДубльГИС Одной из самых распространенных социально-направленных ГИС является ДубльГИС. [5]ДубльГИС — бесплатный электронный справочник предприятий с интерактивной картой города. Выпускается одноимённой фирмой и её франчайзи в 35 ...
0 комментариев