Навигация
Синтез непрерывного регулятора
25704
знака
6
таблиц
50
изображений
2. Синтез непрерывного регулятора
На практике, применяются следующие регуляторы:
П-регулятор.
Регулятор перемещает регулирующий орган пропорционально отклонению регулируемой величины от заданного значения:
![]()
k – коэффициент передачи П-регулятора.
И-регулятор.
Регулятор перемещает регулирующий орган пропорционально интегралу от отклонения регулируемой величины:
![]()
Коэффициент пропорциональности k, численно равный скорости перемещения регулирующего органа при отклонении регулируемой величины на единицу ее измерения, называется коэффициентом передачи И-регулятора.
ПИ-регулятор.
Эти регуляторы перемещают регулирующий орган пропорционально сумме отклонения и интеграла от отклонения регулируемой величины:
Постоянная времени Т – постоянная времени интегрирования (время изодрома).
В динамике, ПИ-регулятор соответствует системе из двух параллельно включенных звеньев: пропорционального и интегрирующего.
ПД-регулятор.
Рассматриваемые регуляторы перемещают регулирующий орган пропорционально отклонению и скорости изменения регулируемой величины:
![]()
Постоянная времени Т характеризует степень ввода в закон регулирования производной. Она называется постоянной времени дифференцирования (временем предварения регулятора).
В динамическом отношении, эти регуляторы подобны системе из двух параллельно включенных звеньев: безынерционного и идеального диффиренцирующего.
ПИД-регулятор.

В динамическом отношении, эти регуляторы подобны системе из трех параллельно включенных звеньев: безынерционного, интегрирующего и идеального дифференцирующего.
Структура и параметры настройки регуляторов выбираются исходя из динамических или математических моделей объектов.
При определении оптимальных параметров настройки регуляторов промышленных процессов в качестве показателя оптимальности системы регулирования обычно выбирается требование минимума того или иного критерия качества при действии на объект наиболее тяжелого возмущения (или изменении заданного значения регулируемой величины) с учетом добавочного ограничения на запас устойчивости системы.
При практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы, величина которого в системах совпадает с максимумом амплитудно-частотной характеристики замкнутой системы регулирования.
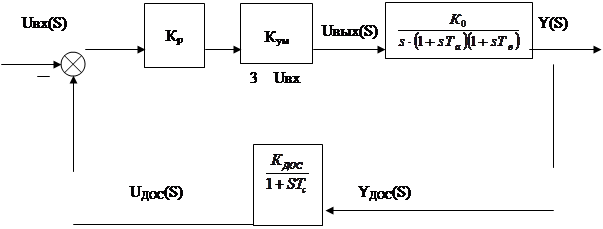
Для заданной системы (Рис. 1.) нужно подобрать регулятор, обеспечивающий желаемый показатель колебательности.
Допустимое значение показателя колебательности М определяется на основании опыта эксплуатации систем регулирования. В хорошо демпфированных системах регулирования показатель колебательности не должен превосходить значений 1,1-1,5. Хотя в некоторых случаях допускается значение 2-2,5.
В нашем случае, М=1,25
Расчет регулятора сводится к следующей методике расчета:
Величина параметра регулятора, при которой амплитудно-фазовая характеристика разомкнутой системы будет касаться окружности с заданным М, определяется следующим образом:
1. Строится АФЧХ регулируемого объекта, и из начала координат проводится луч под углом к отрицательной вещественной полуоси.
2. Проводится окружность с центром на вещественной отрицательной полуоси, касающаяся одновременно АФЧХ регулируемого объекта и этого луча.
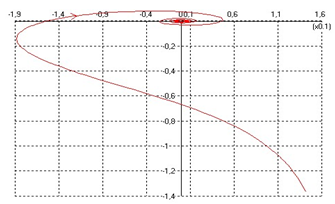
В качестве регулятора попробуем использовать ПИ-регулятор. Найдем его параметры с помощью Mat lab’а.
| clc clear W1=tf([0.9],[20 1],'td', 1) % задаем передаточную функцию W2=tf([1],[500 100 1],'td', 15) % задаем передаточную функцию Wob=W1*W2 % общая передаточная двух последовательных частей системы nyquist(Wob) M=1.25; w=0.0001:0.0001:0.3; s=i*w; Kp=3.2; Ki=0.03 Wob1=((0.9).*(Kp+(Ki./(s))))./(10000*s.^3+2500*s.^2+120*s+1); re=real(Wob1); im=imag(Wob1); R=M/(M^2-1); C=(M^2)/(1-M^2); x=-1:0.00001:0.4; y1=sqrt(R^2-(x-C).^2); y2=-sqrt(R^2-(x-C).^2); K=tan(asin(1/M)); y3=K*x; plot(re, im, x,y1,x,y2,x,y3) grid on |
Изменяя значения Kp и Ki, подберем такие значения, при которых окружность одновременно касается АФЧХ и луча. Это достигается при:
![]()
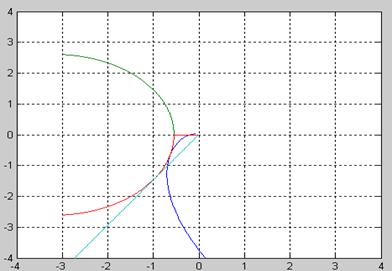
Рис. 5. Расчет ПИ-регулятора
Промоделируем систему с ![]() и
и ![]()
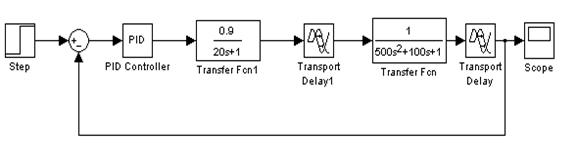
Рис.6. Структура объекта с регулятором
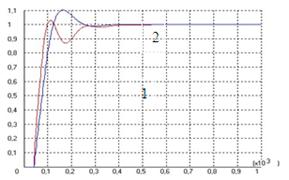
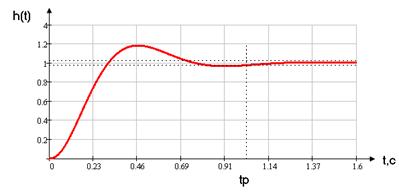
Получим характеристику:
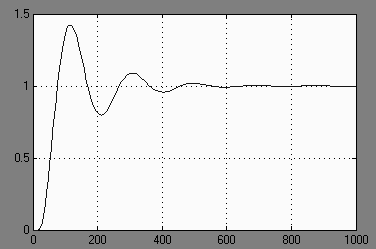
Рис. 7. Поведение непрерывного объекта с ПИ-регулятором
При использовании данного регулятора точность составит
![]()
что удовлетворяет заданному условию
![]()
Следовательно будем использовать ПИ-регулятор с параметрами
![]() и
и ![]()
Передаточная функция такого регулятора имеет вид:
![]()
Похожие работы


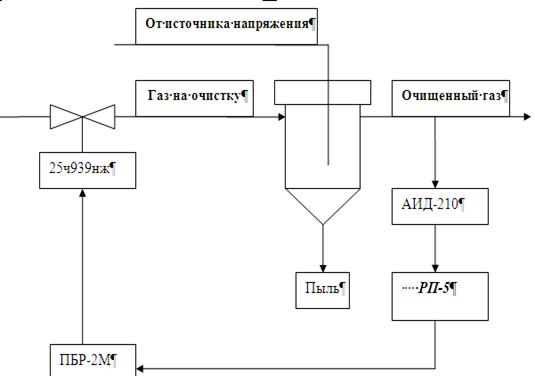
... параметры. Показателем эффективности данного процесса является степень очистки газа. Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора. Выбраны приборы для основного контура регулирования. 1. Специальная часть ...
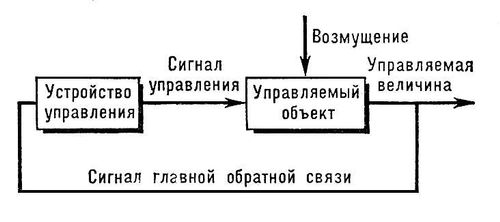
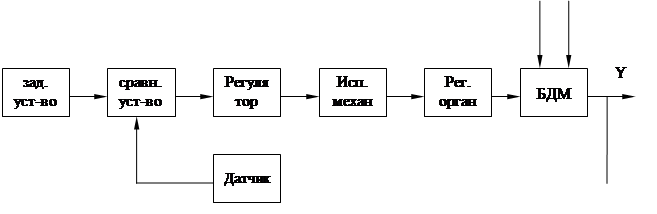
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...


... устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах. Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают: 1. построение располагаемой ЛАХ, т.е. ЛАХ исходной ...

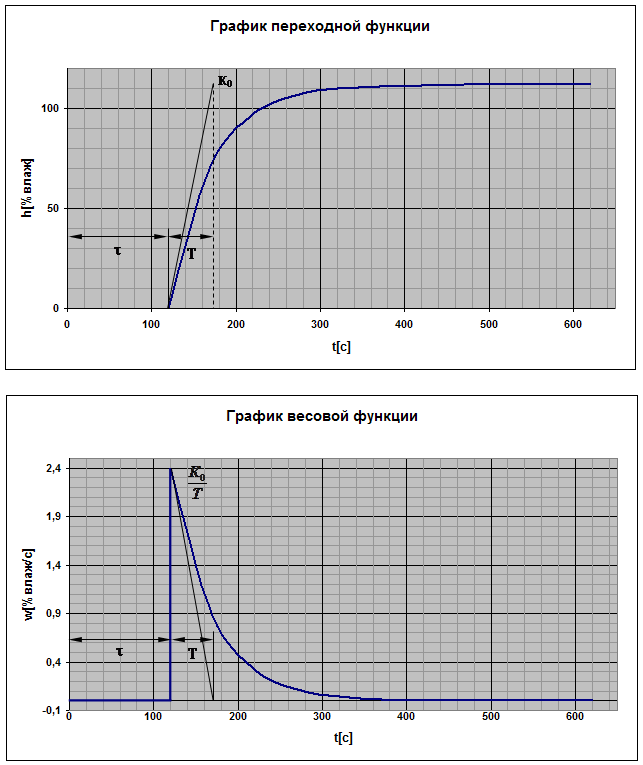

... воздействие) Δf(t) [%] - изменение концентрации массы (возмущающее воздействие) Δy(t) [г/м2] – изменение массы 1кв.м. полотна (выходная переменная) Временные характеристики по каналу управления. Передаточная функция объекта регулирования. Wоб(р) = К0 - коэффициент передачи - постоянная времени Т =50 с - запаздывание информации t =120 ...
0 комментариев