Навигация
Основные элементы систем автоматического регулирования
49761
знак
0
таблиц
0
изображений
4.2 Основные элементы систем автоматического регулирования.
Система автоматического регулирования представляет собой комплекс, состоящий из регулируемого объекта и регулятора. По характеру используемых элементов и функциям, которые они выполняют, системы автоматической стабилизации, следящие системы и системы программного регулирования принципиальных различий не имеют.
В соответствии с принципом действия системы автоматического регулирования можно выделить основные элементы, как правило, присутствующие во всех системах.
Во всех трёх группах систем управляющее воздействие сравнивается с регулируемой величиной. Для выполнения операции сравнения применяются устройства, называемые элементами сравнения. Управляющее воздействие и регулируемая величина, поступающие на два входа элемента сравнения, должны быть предварительно преобразованы и приведены к сигналам одного вида энергии и размерности. Эти операции выполняются измерительным элементом со стороны управляющего воздействия.
В большинстве случаев непосредственное использование выходного сигнала элемента сравнения для приведения в действие регулирующего органа объекта не представляется возможным. Поэтому возникает необходимость в предварительном усилении сигнала как по величине, так и по мощности. Кроме того, часто необходимо осуществить и преобразование сигнала, связанное с формой представления воздействия, и перевод его из одного вида энергии в другой. Эти функции обычно выполняются тем или иным усилителем. Таким образом, в системах автоматического регулирования в числе основных устройств в большинстве случаев применяют усилительный элемент .
В практике могут встретится случаи, когда применение усилителей не обязательно. При этом регулятор непосредственно действует на регулирующий орган и называется регулятор прямого действия . Автоматическая система с регулятором прямого действия называется системой прямого регулирования .
При наличии усилителей регулирующее устройство называется регулятором непрямого действия. Автоматическая система с регулятором непрямого действия называется системой непрямого регулирования .
Приведение в действие регулирующего органа объекта обычно осуществляется с помощью исполнительного элемента.
В системе автоматического регулирования, составленной из объекта регулирования, элемента сравнения, усилителя и исполнительного элемента, динамические процессы могут протекать недостаточно качественно, по тем или иным причинам процесс регулирования может оказаться вообще неустойчивым. Для того чтобы система автоматического регулирования обладала устойчивым процессом и удовлетворяла требуемым условиям качества процесса регулирования, применяют корректирующие устройства.
Таким образом, система автоматического регулирования состоит из объекта регулирования и регулятора. Регулятор включает в себя такие основные элементы, как элемент сравнения, усилитель, исполнительный элемент и корректирующие устройства.
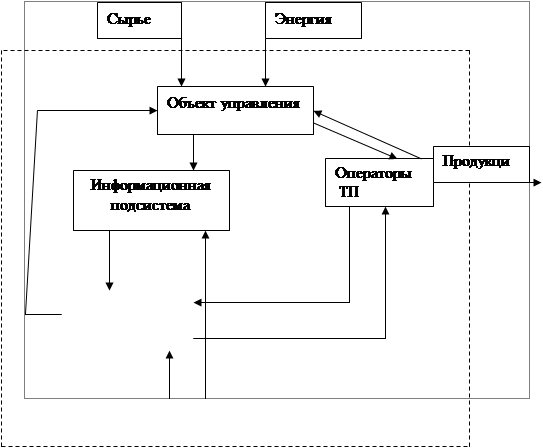
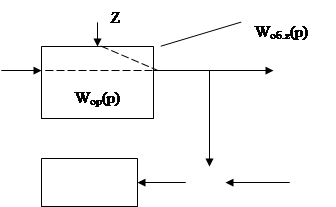
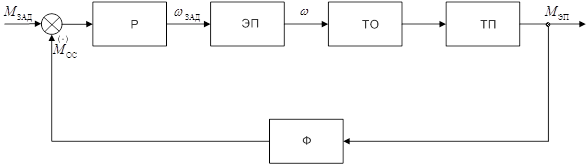
Обычно системы автоматического регулирования представляют в виде структурных схем. Эта структурная схема может представлять все три группы систем, то есть системы автоматической стабилизации, следящие системы и системы программного регулирования. Принципиальной разницы между этими системами по применению и назначению элементов нет. Есть некоторое различие в задающем элементе. Так, например, задающий элемент в системе автоматической стабилизации вырабатывает управляющее воздействие постоянной величины, которое называется уставкой регулятора и с которой сравнивается регулируемая величина при работе системы. При работе схемы в режиме следящей системы задающий элемент должен обеспечить измерение управляющего сигнала, поступающего на следящую систему извне.
4.3 Статическое и астатическое регулирование.
Системы автоматической стабилизации, следящие системы и системы программного регулирования разделяют на две группы: системы статические и системы астатические (не имеющие статической ошибки).
Система автоматического регулирования будет статической по отношению к возмущающему воздействию, если при стремлении возмущающего воздействия к постоянной величине отклонения регулируемой величины также стремится к постоянной величине, отличной от нуля и зависящей от величины приложенного воздействия.
Систему автоматического регулирования можно назвать статической по отношению к управляющему воздействию, если при стремлении последнего к постоянной величине ошибка также стремится к постоянной, отличной от нуля, величине и зависит от значения приложенного воздействия.
Система автоматического регулирования будет астатической по возмущающему воздействию, если при стремлении возмущающего воздействия к постоянной величине отклонение регулируемой величины стремится к нулю и не зависит от величины приложенного воздействия.
Система автоматического регулирования будет астатической по отношению к управляющему воздействию, если при стремлении управляющего воздействия к постоянной величине ошибка стремится к нулю и не зависит от величины воздействия.
Похожие работы
... АСР. Данная схема детализируется для расчета замкнутой АСР и приводится к виду X0 Wp(p) Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора В качестве выходной величины системы ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...

... [3 (п.9.13в)]; - обеспечения минимального расхода наружного воздуха в системах с переменным расходом [3 (п.9.15)] и др. 3.4 Регулирующие функции Регулирующие функции – автоматическое поддержание заданных параметров являются основными по определению [3 (п.9.11)] для систем воздушного отопления, приточной и вытяжной вентиляции, работающей с переменным расходом, рециркуляцией воздуха, систем ...
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
0 комментариев