Навигация
2. Основные понятия.
2.1 Фундаментальные принципы управления.
Целенаправленные процессы, выполняемые человеком для удовлетворения различных потребностей, представляет собой организованную и упорядоченную совокупность действий - операций, которые делятся на два основных вида: рабочие операции и операции управления. К рабочим операциям относятся действия, непосредственно необходимые для выполнения процесса в соответствии с теми природными законами, которыми определяется ход данного процесса, например, снятие стружки в процессе резанья изделия на станке, перемещение экипажа, вращение вала двигателя и т.п. Для облегчения и усовершенствования рабочих операций используются различные технические устройства, частично или полностью заменяющие человека в данной операции. Замена труда человека в рабочих операциях называется механизацией. Цель механизации состоит в высвобождении человека в тяжёлых операциях, требующих больших затрат физической энергии (земляные работы, подъём грузов), во вредных операциях (химические, радиоактивные процессы), в «рутинных» (однообразных, утомительных для нервной системы) операциях (завинчивание однотипных винтов при сборке, заполнение типовых документов, выполнение стандартных вычислений и т.п.).
Для правильного и качественного выполнения рабочих операций необходимы сопровождающие их действия другого рода - операции управления, посредством которых обеспечиваются в нужные моменты начало, порядок следования и прекращение рабочих операций, выделяются необходимые для их выполнения ресурсы, придаются нужные параметры самому процессу - направления, скорости, ускорения рабочему инструменту или экипажу; температура, концентрация химическому процессу и т.д. Совокупность управляющих операций образует процесс управления .
Операции управления так же частично или полностью могут выполняться техническими устройствами. Замена труда человека в операциях управления называется автоматизацией , а технические устройства, выполняющие операции управления, - автоматическими устройствами . Совокупность технических устройств (машин, орудий труда, средств механизации), выполняющих данный процесс, с точки зрения управления является объектом управления . Совокупность средств управления и объекта образует системы управления. Система, в которой все рабочие и управляющие операции выполняются автоматическими устройствами без участия человека, называются автоматической системой. Система, в которой автоматизирована только часть операций управления, а другая часть (обычно наиболее ответственная) выполняется людьми, называется автоматизированной (или полуавтоматической) системой.
Круг объектов и операций управления весьма широк. Он охватывает технологические процессы и агрегаты, группы агрегатов, цехи, предприятия, человеческие коллективы, организации и т.д.
Объекты управления и виды воздействия на них.
Объекты, в которых протекает управляемый процесс, будем называть объектами управления. Это разнообразные технические устройства и комплексы, технологические или производственные процессы. Состояние объекта можно характеризовать одной или несколькими физическими величинами, называемыми управляемыми или регулируемыми переменными. Для технического устройства, например, электрического генератора, регулируемой переменной может быть напряжение на его выходных клеммах; для производственного участка или цеха - объём выпускаемой им промышленной продукции.
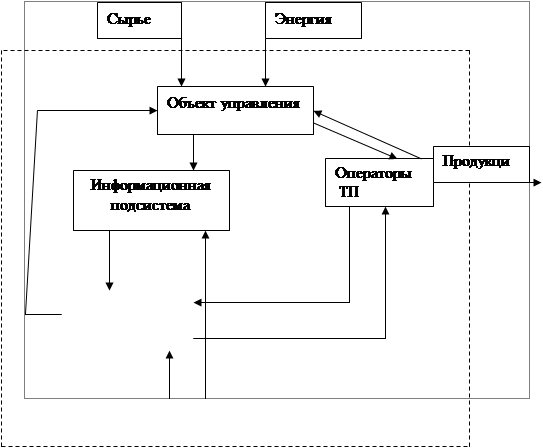
Как правило, к объекту управления приложено два вида воздействий: управляющие - r(t) и возмущающее f(t); состояние объекта характеризуется переменной x(t):
 f(t)
f(t)![]()
![]()
![]() r(t) объект x(t)
r(t) объект x(t)
управления
Изменение регулируемой величины x(t) обусловливается как управляющим воздействием r(t), так и возмущающим, или помехой f(t). Дадим определение этим воздействиям.
Возмущающим называется такое воздействие, которое нарушает требуемую функциональную связь между регулируемыми или управляемыми переменными и управляющим воздействием. Если возмущение характеризует действие внешней среды на объект, то оно называется внешним. Если это воздействие возникает внутри объекта за счёт протекания нежелательных, но неизбежных процессов при его нормальном функционирование, то такие возмущения называются внутренними.
Воздействия, прикладываемые к объекту управления с целью изменения прикладываемой величины в соответствии с требуемым законом, а также для компенсации влияния возмущений на характер изменения управляемой величины, называются управляющими.
Основная цель автоматического управления любым объектом или процессом состоим в том, чтобы непрерывно поддерживать с заданной точностью требуемую функциональную зависимость между управляемыми переменными, характеризующими состояние объекта и управляющими воздействиями в условиях взаимодействия объекта с внешней средой, т.е. при наличии как внутренних, так и внешних возмущающих воздействий. Математическое выражение этой функциональной зависимости называется алгоритмом управления.
Понятие об элементе системы.
Любой объект управления сопряжён с одним или несколькими регуляторами, формирующими управляющие воздействия, подаваемые на регулирующий орган. Объект управления совместно с управляющим устройством, или регулятором, образуют систему управления или регулирования. При этом, если человек не участвует в процессе управления, то такая система называется системой автоматического управления.
Регулятор системы представляет собой комплекс устройств, соединённых между собой в определённой последовательности и осуществляющих реализацию простейших операций над сигналами. В связи с этим оказывается возможным произвести декомпозицию (расчленение) регулятора на отдельные функциональные элементы - простейшие конструктивно-целостные ячейки, выполняющие одну определённую операцию с сигналом.
К таким операциям следует отнести:
1) преобразование контролируемой величины в сигнал;
2) преобразование: а) сигнал одного рода энергии в сигнал другого рода энергии; б) непрерывного сигнала в дискретный и обратно; в) сигнала по величине энергии; г) виды функциональной связи между выходными и входными сигналами;
3) хранение сигналов;
4) формирование программных сигналов;
5) сравнение контрольных и программных сигналов и формирование сигнала рассогласования;
6) выполнение логических операций;
7) распределение сигнала по различным каналам передачи;
8) использование сигналов для воздействия на объект управления.
Перечисленные операции с сигналами, выполняемые элементами систем автоматического управления, используются в дальнейшем как основа систематизации всего многообразия элементов автоматики, применяемого в различных по характеру, назначению и принципу действия системах, т.е. порождённого многообразием автоматических систем управления и контроля.
Чтобы осуществлять автоматическое управление или строить систему управления, нужны знания двоякого вида: во-первых, конкретные знания данного процесса, его технологии и, во-вторых, знания принципов и методов управления, общих для самых разнообразных объектов и процессов. Конкретные специальные знания дают возможность установить, что и, главное, как следует изменять в системе, чтобы получить требуемый результат.
При автоматизации управления техническими процессами возникает необходимость в различных группах операций управления. К одной из таких групп относится операция начала (включения), прекращения (отключения) данной операции и перехода от одной операции к другой (переключения).
Для правильного и качественного ведения процесса некоторые из его координат - управляемые - должны поддерживаться в определённых границах или изменяться по определённому закону.
Другая группа операций управления связана с контролем за координатами с целью установления допустимых границ. Эта группа операций состоит в измерении значений координат и представления результатов измерения в удобной для человека-оператора форме.
Третья группа операций управления - операции по поддержанию заданного закона изменения координат - изучается в теории автоматического управления.
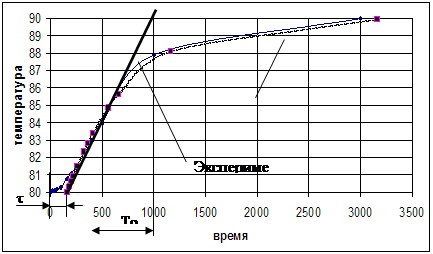
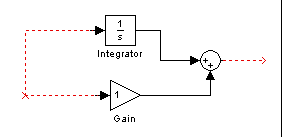
Всякий объект, обладающий массой, является динамическим, поскольку под действием внешних сил и моментов (конечной величины) со стороны объекта возникает соответствующая реакция его положения (или состояния) не может быть изменено мгновенно. Переменные x, u и f (где x - совокупность управляемых координат процесса, u - воздействия или управления, прикладываемые к объекту, и f - возмущения действующие на вход объекта) в динамических объектах обычно связаны между собой дифференциальными, интегральными или разностными уравнениями, содержащими в качестве независимой переменной время t .
Изменения координат в нормальном, желаемом процессе определяется совокупностью правил, предписаний или математических зависимостей, называемых алгоритмом функционирования системы. Алгоритм функционирования показывает, как должна изменяться величина x(t) по требованиям технологии, экономики или по другим соображениям. В теории автоматического управления алгоритмы функционирования считаются заданными.
Динамические свойства и форма статических характеристик вносят искажения: действительный процесс будет отличаться от желаемого (который, например, при тех же воздействиях имел бы место в безынерционном линейном объекте). Поэтому требуемый закон изменения управления u , или алгоритм управления, не будет подобным алгоритму функционирования; он будет зависит от алгоритма функционирования, динамических свойств и характеристик объекта. Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств.
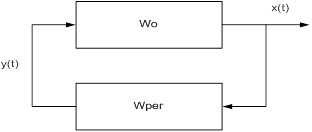
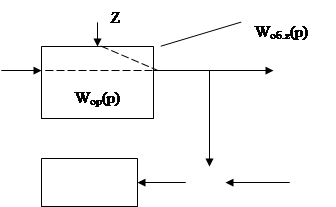
В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с заданным и фактическим функционированием, или с причинами, вызвавшие отклонения. Используется три фундаментальных принципа: разомкнутого управления, обратной связи и компенсации.
Похожие работы
... АСР. Данная схема детализируется для расчета замкнутой АСР и приводится к виду X0 Wp(p) Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора В качестве выходной величины системы ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...

... [3 (п.9.13в)]; - обеспечения минимального расхода наружного воздуха в системах с переменным расходом [3 (п.9.15)] и др. 3.4 Регулирующие функции Регулирующие функции – автоматическое поддержание заданных параметров являются основными по определению [3 (п.9.11)] для систем воздушного отопления, приточной и вытяжной вентиляции, работающей с переменным расходом, рециркуляцией воздуха, систем ...
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
0 комментариев