Навигация
Принцип разомкнутого управления
49761
знак
0
таблиц
0
изображений
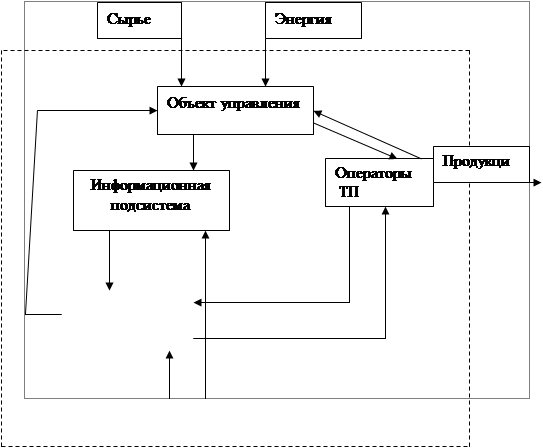
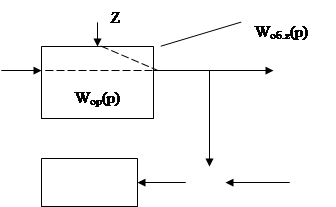
2.2 Принцип разомкнутого управления.
Сущность принципа состоит в том, что алгоритм управления строится только на основе заданного алгоритма функционирования и не контролируется по фактическому значению управляемой величины.
2.3 Принцип управления по отклонению
(принцип обратной связи).
Этот принцип является одним из наиболее ранних и широко распространённых принципов управления. В соответствии с ним воздействие на регулирующий орган объекта вырабатывается как функция отклонения регулируемой величины от предписанного значения.
Обратную связь можно обнаружить во многих процессах в природе. Примерами могут служить вестибулярный аппарат, обнаруживающий отклонения тела от вертикали и обеспечивающий поддержание равновесия, системы регуляции температуры тела, ритма дыхания и т.п. В общественных учреждениях обратная связь при управлении устанавливается посредством осуществления контроля исполнения. Принцип обратной связи является весьма универсальным фундаментальным принципом управления, действующим в технике, природе и обществе.
2.4 Принцип регулирования по возмущению
(принцип компенсации).
Так как отклонение регулируемой величины зависит не только от управления, но и возмущающего воздействия, то в принципе можно сформулировать закон управления так, чтобы в установившемся режиме отклонение отсутствовало.
Принцип регулирования паровой машины по моменту сопротивления на её валу был предложен в 1930 г. французским инженером И.Понселе, однако реализовать это предложение на практике не удалось, поскольку динамические свойства паровой машины (наличие астатизма) не допускали непосредственного использования принципа компенсации. Но в ряде других технических устройств принцип компенсации использовался давно. Примечательно, что его использование в статике не вызывало сомнений, попытка же Г.В.Щипанова в 1940 г. Предложить принцип инвариантности по возмущению для ликвидации отклонений в динамике вызывала резкую дискуссию и обвинения в нереализуемости предложения. В.С.Кулебакин в 1948г. и Б.Н.Петров в 1955 г. показали, как следует строить системы, чтобы можно было реализовать в них принцип инвариантности. В 1966 г. предложенный Г.В.Щипановым принцип инвариантности был зарегистрирован как открытие с приоритетом - апрель 1939 г. Тем самым была исправлена ошибка его оппонентов, состоявшая в том, что отрицалась реализуемость принципа инвариантности вообще.
Системы регулирования по возмущению в сравнении с системами, действующими по отклонению, отличаются обычно большими устойчивостью и быстродействием. К их недостаткам относятся трудность измерения нагрузки в большинстве систем, неполный учёт возмущений (компенсируются только те возмущения, которые измеряются). Так, при компаундировании электрической машина не компенсируются колебания напряжения сетей, питающих гонный двигатель и обмотки возбуждения, колебания сопротивлений обмоток от изменения температуры и др. Во многих случаях весьма эффективно применение комбинированного регулирования по возмущению и отклонению, широко используемое для регулирования напряжения мощных синхронных генераторов на крупных электростанциях (компаундирование с коррекцией). Комбинированные регуляторы объединяют достоинства двух принципов, но, естественно, конструкция их сложнее, а стоимость выше.
3. Основные виды алгоритмов функционирования.
С давних времён в системах автоматического управления использовался алгоритм функционирования, называемый стабилизацией - поддержанием постоянного заданного значения регулируемой величены. Позднее появились алгоритмы типа программного управления - поддержания заданной функции времени - и следящего управления - воспроизведения неизвестной заранее функции.
В последние десятилетие появились новые, более тонкие алгоритмы функционирования. Рассмотрим основные из них.
3.1 Поиск экстремума показателя качества
(экстремальное управление)
В ряде процессов показатель качества, или эффективность, выражается в каждый момент времени функцией текущих координат системы. При этом управление может считаться нормальным, если оно обеспечивает удержание показателя качества в точке максимума. Примером может служить настройка приёмной станции на частоту передающей по наибольшей громкости приёма или наибольшей яркости свечения индикаторной лампочки. Точка экстремума под воздействием различных возмущений смещается в каком-то определённом направлении, но при этом неизвестно, в каком именно направлении следует воздействовать на регулирующий орган, чтобы вернуть систему к экстремуму.
Для экстремального управления выполняются сначала небольшие пробные движения, затем анализируется реакция на них системы и по результатам анализа вырабатывается управляющее воздействие.
Первые упоминания в литературе об экстремальных регуляторах содержатся в статье М.Леблана (1922), где описаны регуляторы для колебательного контура электропоезда, и в книге Т.Штейна (1926), где высказывалась идея регулирования топки парового котла по минимуму потерь в дымовой трубе. Далее экстремальные регуляторы исследовались и предлагались Ю.С.Хлебцевичем (1940), В.В.Казакевичем (1943). Широкую известность принцип экстремального регулирования приобретает в 50-х годах после выхода в свет книги Цян Сюэ-сеня (1954) и статей Дрейпера и Ли.
Похожие работы
... АСР. Данная схема детализируется для расчета замкнутой АСР и приводится к виду X0 Wp(p) Рис. 7. Структурная схема замкнутой автоматической системы управления, состоящей из объекта и регулятора В качестве выходной величины системы ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...

... [3 (п.9.13в)]; - обеспечения минимального расхода наружного воздуха в системах с переменным расходом [3 (п.9.15)] и др. 3.4 Регулирующие функции Регулирующие функции – автоматическое поддержание заданных параметров являются основными по определению [3 (п.9.11)] для систем воздушного отопления, приточной и вытяжной вентиляции, работающей с переменным расходом, рециркуляцией воздуха, систем ...
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
0 комментариев