Навигация
1.3 СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА
Кинетостатический расчет, положенный в основу силового расчета механизма, базируется на принципе Д’ Аламбера, который в общем случае движения звеньев механизмов, совершающих сложное плоское движение, позволяет решить задачу путем сведения сил инерции звеньев к главному вектору инерции Fi и к главному моменту сил Мi.
Fi = - asi· mi (1.3.1).
Знак "-" означает, что вектор силы инерции направлен в сторону противоположную ускорению центра масс.
Массы звеньев рассчитываются с помощью формулы:
m = q · l (1.3.2),
где q = 0,1 кг/м, l - длина звена.
m = P/g (1.3.3),
где g- ускорение свободного падения, g = 9,8 м/с2
Также существует главный момент инерции звена, который приложен к центру масс звена и направлен в противоположную сторону угловому ускорению звена.
Мi= -Jsi · ε (1.3.4),
где Js- момент инерции звена,
ε - угловое ускорение звена.
1.3.1 РАСЧЕТ СИЛ И ГЛАВНЫХ МОМЕНТОВ ИНЕРЦИИ ЗВЕНЬЕВ МЕХАНИЗМА
mEF = q · lEF = 0,1 · 0,11 = 0,011 кг;
аS3 = 164 м/c2;
Fi1 = - as1 · mAB = - 164 · 0, 011 = - 1,8 Н;JS3 = mEF · lEF2 / 12 = 0,011 · (0,11)2 /12 = 11 · 10-6 кг · м2
ε = 636,36 рад/с2
Mu3 = - JS3 · ε = 11 · 10-6 · 636,36 = -0,7 · 10-2
mАС = q · lAC = 0,1 · 0,09 = 0,009 кг;
аS2 = 218 м/c2;
Fi2 = - as2 · mAC = - 218 · 0, 009 = -1,9 Н;JS2 = mAC · lAC2 / 12 = 0,009 · (0,09)2 /12 = 6 · 10-6 кг · м2
ε = 1177,77 рад/с2
Mu2 = - JS2 · ε = - 6 · 10-6 · 1177,77 = - 0,7 · 10-2
mCD = q · lCD = 0,1 · 0,06 = 0,006 кг;
аS4 = 86 м/c2;
Fi4 = - as4 · mCD = - 86 · 0, 006 = - 0,5 Н;JS4 = mCD · lCD2 / 12 = 0,006 · (0,06)2 /12 = 1,8 · 10-6 кг · м2
ε = 1233,33 рад/с2
Mu4 = - JS4 · ε = 1,8 · 10-6 · 1233,33 = -0,2 · 10-2
mAB = q · lAB = 0,1 · 0,034 = 0,0034 кг;
аS1 = 134 м/c2;
Fi1 = - as1 · mAB = - 134 · 0, 0034 = - 0,45 Н;Силы и главные моменты звеньев сведем в таблицу 1.3.
Таблица 1.3
| Fi1 = - 0,45 H | Mi1 = 0 H · м2 |
| Fi2 = - 1,9 H | Mi2 =- 0,7· 10-2 H · м2 |
| Fi3 = - 1,8 H | Mi3 =- 0,7· 10-2 H · м2 |
| Fi4 = - 0,5 H | Mi4 =- 0,2· 10-2 H · м2 |
1.3.2 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В КИНЕМАТИЧЕСКИХ ПАРАХ
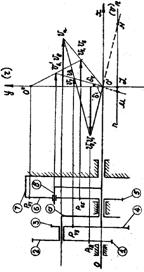
Силовой анализ механизма начинаем с группы Ассура 3-5, наиболее удаленной от ведущего звена. Связи в шарнирах заменяются реакциями RE1 и RE2.
В шарнире F реакция неизвестна по модулю и направлена по горизонтали. Обозначим в точке S3 силу инерции. Обозначим также вес G3 звена FE и вес ползуна P.
Сумма моментов относительно точки F равна 0:
∑ MF = 0 (1.3.4)
∑ MF = -R’E · lef + Fi3 · h i3 - M + G3h1 = 0 (1.3.5)
R’E =(G3h1 + Fi3 · h i3 - M) / lef = (0,1 ·0,008 +1,8·0,006 +0,7·10-2) / 0,11 = 0,1 H
Составляем векторное уравнение:
G3 + R’E+ R"E+ Fi3 + Fi5 + P + G5+R56 = 0 (1.3.6).
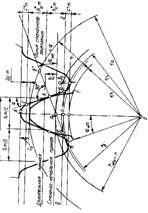
С учетом этого уравнения строим замкнутый силовой многоугольник. На чертеже выбираем полюс PF. От него проводим вектор произвольной длины по направлению силы G3. Вычисляем масштабный коэффициент:
μF = G3 / PF G3 (1.3.7),
μF = 0,1/ 5 = 0,02 Н/мм
Далее к вектору G3 достраиваем другие составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи масштабного коэффициента. Находим неизвестные силы R’’Eи R56, зная их направление. Определив их численное значения в мм, переводим это значение в Н с помощью масштабного коэффициента.
R’’E = mF· ПF R’’E = 0,02 · 84= 1,68 H (1.3.8),
где, ПF R’’E - положение R’’Eна плане сил.
R56= mF· ПF R56 = 0,02 · 37,5 = 0,75 H (1.3.9),
где, ПF R56- положение R56 на плане сил.
Найдем RE- результирующую силу в паре Е, соединив начало R’Eи конец R"E. Определив его численное значения в мм, переводим это значение в Н с помощью масштабного коэффициента.
RE = mF· ПF RE = 0,02 · 85= 1,7 H (1.3.10),
где, ПF RE - положение RE на плане сил.
Для определения реакции в кинематической паре 2-4 к шарниру АС необходимо приложить силу REтого же значения, но противоположного направления. Реакции в шарнирах А и D нужно разложить на составляющие по направлению осей R’А и R’D, и перпендикулярные к ним: R’’А и R’’D. Известна точка приложения сил - центр шарнира, запишем уравнения сумм моментов каждого звена относительно точки С.
∑ MС = R’А · lАС - F i2 · h i5 + Mi2 - G2h6 + RE = 0 (1.3.11),
R’A =(- G2h6 - Fi2 · h i5 + M i2) / lAC= (-0,09·0,036 +1,9·0,023 - 0,7·10-2) / 0,09 = 1,9 H
Для звена СD сумма моментов относительно точки С равна нулю.
∑ MС = R’D · lDС + F i4 · h i3 + Mi4 + G4h4 = 0 (1.3.12),
R’D = (- F i4 · h i3 - Mi4 - G4h4) / lDС = (0,5 · 0,012 + 0,2·10-2 - 0,06 · 0,02) / 0,06 = 0,1 H
Рассмотрим уравнение равновесия группы в целом. Запишем векторное уравнение равновесия этой группы:
R’D+ R’’D + G4 + Fi4 + R’A + R’’A + G2 + Fi2 + RE= 0 (1.3.13).
В этом уравнении известны все составляющие по модулю и по направлению кроме R’’Dи R’’A (они известны только по направлению). Для их нахождения необходимо построить силовой многоугольник, откладывая последовательно векторы сил.
Вычисляем масштабный коэффициент:
μF = R’D/ PF R’D (1.3.14),
μF = 0,1/ 2,5 = 0,04 Н/мм
Далее к вектору R’D достраиваем другие составляющие уравнения (1.3.13), рассчитывая длину векторов при помощи масштабного коэффициента. Находим неизвестные силы R’’Dи R"A, зная их направление. Определив их численное значения в мм, переводим это значение в Н с помощью масштабного коэффициента.
R’’D = mF· ПF R’’D = 0,04 · 140 = 5,6 H (1.3.15),
где, ПF R’’D - положение R’’Dна плане сил.
R"A = mF· ПF R"A = 0,04 · 35 = 1,4 H (1.3.16),
где, ПF R"A - положение R"A на плане сил.
Найдем RD- результирующую силу в паре D, соединив начало R’Dи конец R"D.
Определив его численное значения в мм, переводим это значение в Н с помощью масштабного коэффициента.
RD = mF· ПF RD = 0,04 · 141= 5,64 H (1.3.17),
где, ПF RD - положение RD на плане сил.
Аналогично найдем RА - результирующую силу в паре АС, соединив начало R’А и конец R"А.
Определив его численное значения в мм, переводим это значение в Н с помощью масштабного коэффициента.
RA = mF· ПF RA = 0,04 · 60 = 2, 4 H (1.3.18),
где, ПF RA - положение RA на плане сил.
Теперь определим уравновешивающую силу и уравновешивающий момент, действующий на кривошип АВ.
На кривошип АВ действует шатун силой RA. Считается, что сила Fур приложена перпендикулярно звену АВ. В этом случае уравнение моментов всех сил, приложенных к кривошипу относительно точки В, имеет вид:
∑МВ = 0
∑МВ = RA· h8 + Fур · lAB+ G1 · h9 = 0 (1.3.19)
Fур= G1 · h9 + RA · h8 / lAB = 0,03 · 0,007 + 2,4 · 0,008 / 0,034 = 0,57 H
Mур = Fур· lAB (1.3.20)
Mур = 0,57 · 0,034 = 0,02 H · м
Найденные при силовом анализе механизма величины представлены в таблице 1.4.
Таблица 1.4
| RE = 1,7 H | RA = 2,4 H | RD = 5,64 H | Fур= 0,57 H |
| R’E = 0,1 H | R’A = 1,9 H | R’D = 0,1 H | Mур = 0,02 Н · м |
| R’’E = 1,68 H | R’’A = 1,4 H | R’’D = 5,6 H |
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...

... Отсюда: H (1.48) Н.м (1.49) Полученные данные занесем в таблицу 1.4. Таблица 1.4 Fур, Н Мур, Н×м 28 0.7 2. ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими внешними усилиями ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...


... говорит о том, что механизм не вращается. Но на самом деле он вращается, но есть пассивная связь EF, не добавляющая степеней свободы механизму. Аналитический метод кинематического исследования механизмов. Аналоги скоростей и ускорений Кинематическое исследование механизма, т.е. изучение движения звеньев механизма без учета сил, обусловливающих это движение, состоит в основном в решении трех ...
0 комментариев