Навигация
Кинематический анализ механизма
31016
знаков
5
таблиц
2
изображения
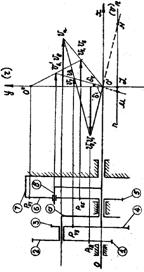
1.2 Кинематический анализ механизма
1.2.1 Определение скоростей точек и звеньев механизма
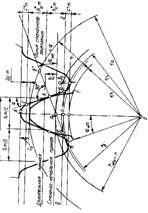
Для определения скоростей точек и звеньев заданного механизма воспользуемся методом планов скоростей.
Планом скоростей называется диаграмма, на которой изображены векторы скоростей точек плоского механизма.
Определим угловую скорость w ведущего звена АВ по формуле:
w = 2π · n /60 = 2 · 3,14 · 850 / 60 = 89 c-1 (1.2.1),
где n - частота вращения.
Построение планов скоростей начинаем со скорости точки А ведущего звена АB. Учитывая, что угловая скорость ведущего звена w известна, скорость точки А определим из уравнения :
VА = wAB × lAB = 89 × 0,034 = 3,026 м/ c-1 (1.2.2),
где lAB– длина звена АB м.
На плоскости черчения определяем полюс Pv, в котором будут находится точки B и D - неподвижные опоры данного механизма. Из полюса проводим вектор а в общем случае произвольной длины, а для конкретно данной задачи а = 151,3 мм, который отвечает скорости VА, в направлении перпендикулярном положению звена АВ вдоль wAB. Вычислим масштабный коэффициент µv по формуле:
µv= VА / Pva = 3,026 : 151,3 = 0,02 м/ мм×с (1.2.3),
где VА- скорость точки А м/с;
Pva- длина вектора на плане скоростей мм.
Для определения скорости точки C воспользуемся условием её принадлежности звену – АС и DC.Скорость точки С определяется из системы векторных уравнений:
![]()
Вектор скорости точки В будет результатом общего решения двух векторных уравнений . В уравнении (1.2.4) первая составляющая VA известна по направлению, а про скорость VCA известно лишь то, что она перпендикулярна звену СА. Потому для дальнейшего построения рядом с точкой а проводится линия, которая перпендикулярна AC.
Абсолютное значение скорости VC определяется из уравнения:
VC = Pvс · µv= 152 · 0,02 = 3,04 м/с (1.2.6),
где Pvс - длина вектора мм.
Соединим на плане скоростей векторы a и с. Этот вектор и является вектором ас, который соответствует звену АС на плане механизма. Т.к. точка Е принадлежит вектору АС, а соответственно и вектору ас на плане скоростей, то для нахождения ее положения на векторе ас будет справедливо:
lАС / lЕС = ас / ес (1.2.7),
ес = 30 · 12 / 90 = 4 мм .
где lЕС - длина звена ЕС;
ес - длина вектора на плане скоростей.
Длина вектора, что соединяет полюс с точкой е, соответствует скорости Ve, численное значение которой равно:
Ve = Pvе · µv = 152,5 · 0,02 = 3,05 м/с (1.2.8)
Для определения скорости точки F воспользуемся условием её принадлежности точке Е. Скорость точки F определяется из уравнения:
VF=VE+VFE (1.2.9)
В этой векторной сумме нам известна скорость точки Е, найденная из уравнения (1.2.9), о другой составляющей этого уравнения - VFE нам известно только то, что траектория движения этого вектора перпендикулярна звену FE. Зная это условие , перенесем на план скоростей линию перпендикулярную по направлению к звену FE, которая бы проходила через точку е. Для того, чтобы составить второе уравнение для скорости VF необходимо определить точку F0. Тогда скорость VF будет равна:
VF=VF0+VFF0 (1.2.10)
Скорость точки F0 равна нулю, потому на плане точка f0 будет находится в полюсе. Скорость VFF0 направлена вдоль движения ползуна. На плане этой скорости будет отвечать линия, которая направлена из полюса перпендикулярно вниз. На пересечении этой линии и линии, которая перпендикулярна звену FE, находится точка f.
Численно скорость VF равна:
Vf = Pvf · µv = 46 · 0,02 = 0,92 м/с (1.2.11),
где, Pvf - длина вектора, который соединяет полюс с точкой f.
Расставим на плане скоростей центры масс каждого звена данного механизма. Для звена BA вектор центра масс S1 на плане скоростей будет направлен из полюса вдоль вектора ba величиной равной его половине.
Численное значение скорости VS1 равно:
VS1 = Pv S1· µv = 76 · 0,02 = 1,52 м/с (1.2.12)
Для звена АС вектор его центра масс S2 на плане скоростей будет направлен из полюса в точку соответствующую середине отрезка ас.
Численное значение скорости VS2 равно:
VS2 = Pv S2· µv = 152 · 0,02 = 3,04 м/с (1.2.13).
Вектор центра масс S3 звена ЕF на плане скоростей будет направлен из полюса в точку соответствующую середине отрезка еf на плане скоростей.
Численное значение скорости VS3 равно:
VS3 = Pv S3· µv = 89 · 0,02 = 1,78 м/с (1.2.14).
Для звена DC вектор центра масс S4 на плане скоростей будет направлен из полюса вдоль вектора dc величиной равной его половине.
Численное значение скорости VS4 равно:
VS4 = Pv S4· µv = 76 · 0,02 = 1,52 м/с (1.2.15).
С помощью плана скоростей можно определить угловые скорости звеньев механизма. Угловая скорость звена АС равна:
wАС = VAC/ lAC = 0,24 / 0,09 = 2,6 c-1 (1.2.16),
где lAC - длина звена;
VAC- скорость движения точки А относительно точки С. Ее численное значение равно:
VAC= ac · µv= 12 · 0,02 = 0,24 м/с (1.2.17),
где ac - длина отрезка, который соединяет точки a и с на плане скоростей.
Аналогично для звена EF вычислим его угловую скорость wEF:
wEF = VEF / lEF = ef · µv / lEF = 135 · 0,02/ 0,11 = 24,5 c-1 (1.2.18),
где lEF - длина звена; VEF- скорость движения точки E относительно точки F.
Для звена CD угловая скорость wCD вычисляется по формуле:
wСD = VCD/ lCD = dc · µv/ lCD = 152 · 0,02/ 0,06 = 50,6 c-1 (1.2.19),
где lCD - длина звена; VCD- скорость движения точки C относительно точки D.
Полученные данные при построении плана скоростей занесем в таблицу 1.1.
Таблица 1.1
| VA = 3,026 м/с | VS1 = 1,52 м/с | wАВ = 89 с-1 |
| VС = 3,04 м/с | VS2 = 3,04 м/с | wАС = 2,6 c-1 |
| VE = 3,05 м/с | VS3 = 1,78 м/с | wСD = 50,6 c-1 |
| VF = 0,92 м/с | VS4 = 1,52 м/с | wEF = 24,5 c-1 |
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...

... Отсюда: H (1.48) Н.м (1.49) Полученные данные занесем в таблицу 1.4. Таблица 1.4 Fур, Н Мур, Н×м 28 0.7 2. ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими внешними усилиями ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...


... говорит о том, что механизм не вращается. Но на самом деле он вращается, но есть пассивная связь EF, не добавляющая степеней свободы механизму. Аналитический метод кинематического исследования механизмов. Аналоги скоростей и ускорений Кинематическое исследование механизма, т.е. изучение движения звеньев механизма без учета сил, обусловливающих это движение, состоит в основном в решении трех ...
0 комментариев