Навигация
3.4.1. Исполнительный двигатель
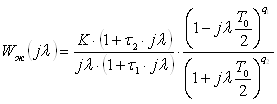
Передаточная функция исполнительного двигателя по углу поворота имеет вид (если пренебречь индуктивностью цепи якоря)
где Кд - коэффициент усиления двигателя, рад/В.с : Кд = wн / Uн ;
Тд - электромеханическая постоянная времени:
В последней формуле a =1,2 - постоянный коэффициент;
Jc - cуммарный момент инерции, приведенный к валу двигателя.
;
3.4.2. Электромашинный усилитель
Передаточная функция ЭМУ
Кэму - коэффициент усиления ЭМУ по напряжению
Uэму - напряжение на выходе ЭМУ ; Uу - напряжение обмотки управления ЭМУ -
Ру, Rу - соответственно мощность и сопротивление обмотки управления ЭМУ,
Ту, Ткз - постоянные времени обмотки управления и короткозамкнутой обмотки якоря ЭМУ.
3.4.3. Усилитель
Усилитель (на функциональной схеме - У) служит для согласования выходного сигнала ЦАП с входным сопротивлением обмотки управления ЭМУ. Его можно считать безинерционным звеном с передаточной функцией Wу(Р) = Ку .
В расчетах принять Ку = 1 .
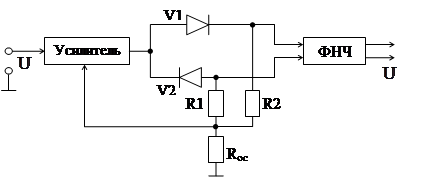
3.4.4. Фазовый детектор
Передаточная функция фазового детектора Wфд (P) = Кфд,
где Кфд=1 - коэффициент усиления фазового детектора.
3.4.5. Измерительное устройство
Передаточная функция измерительного устройства Wиу(Р)=Киу,
где Киу=1 - коэффициент усиления измерительного устройства.
Приложение 1 (продолжение)
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 17 | 250 | 180 | 1,0 | 0,04 | 0,01 | 25 |
| 18 | 300 | 150 | 1,5 | 0,02 | 0,02 | 25 |
| 19 | 350 | 150 | 0,5 | 0,02 | 0,05 | 30 |
| 20 | 50 | 70 | 2,5 | 0,05 | 0,01 | 30 |
| 21 | 100 | 50 | 3,0 | 0,05 | 0,01 | 20 |
| 22 | 150 | 100 | 2,5 | 0,08 | 0,05 | 25 |
| 23 | 200 | 120 | 1,5 | 0,05 | 0,02 | 30 |
| 24 | 70 | 25 | 0,75 | 0,025 | 0,01 | 20 |
| 25 | 120 | 50 | 0,8 | 0,01 | 0,02 | 20 |
| 26 | 110 | 60 | 0,5 | 0,04 | 0,01 | 25 |
| 27 | 300 | 120 | 0,5 | 0,01 | 0,02 | 25 |
| 28 | 150 | 100 | 1,0 | 0,02 | 0,05 | 30 |
| 29 | 100 | 70 | 1.2 | 0,05 | 0,02 | 20 |
| 30 | 75 | 50 | 1,0 | 0,01 | 0,05 | 25 |
Время регулирования tр: для студентов группы АТ-1 tp=2 c.,
АТ-2 tp=2,5 c., АТ-3 tp=3 c.
Приложение 1
Варианты исходных данных для проектирования следящей
системы
| Вари- | Статиче- Мос, Нм | Момент Jо, кгм2 | Максим. wо max, с-1 | Максим. eо max, с-2 | Максим. Xmax, рад. | Максим. smax, % |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | 50 | 20 | 0,5 | 0,02 | 0,01 | 20 |
| 2 | 100 | 70 | 1,0 | 0,06 | 0,02 | 25 |
| 3 | 200 | 100 | 1,5 | 0,06 | 0,01 | 25 |
| 4 | 300 | 90 | 2,0 | 0,08 | 0,02 | 30 |
| 5 | 350 | 120 | 2,5 | 0,08 | 0,02 | 30 |
| 6 | 50 | 30 | 3,0 | 0,05 | 0,03 | 35 |
| 7 | 100 | 60 | 0,5 | 0,02 | 0,01 | 20 |
| 8 | 150 | 90 | 1,0 | 0,06 | 0,02 | 20 |
| 9 | 200 | 80 | 1,5 | 0,05 | 0,02 | 25 |
| 10 | 250 | 120 | 2,0 | 0,08 | 0,03 | 25 |
| 11 | 300 | 100 | 0,5 | 0,02 | 0,01 | 30 |
| 12 | 350 | 100 | 1,0 | 0,04 | 0,02 | 30 |
| 13 | 50 | 50 | 0,5 | 0,05 | 0,01 | 35 |
| 14 | 100 | 100 | 0,2 | 0,08 | 0,02 | 35 |
| 15 | 150 | 120 | 0,5 | 0,02 | 0,05 | 35 |
| 16 | 200 | 150 | 1,0 | 0,03 | 0,02 | 20 |
3.4.6. Редуктор
Передаточная функция редуктора Wред(Р)=Кред=1/iр .
Структурная схема нескорректированной следящей системы представлена на рис.2.
Рис.2. Структурная схема нескорректированной следящей системы
3.5. Расчет последовательного непрерывного
корректирующего звена методом ЛАЧХ
Построение логарифмической амплитудно-частотной характеристики (ЛАЧХ) последовательного корректирующего звена проводится в такой последовательности.
1. Строится ЛАЧХ заданной (нескорректированной) системы.
2. Строится желаемая ЛАЧХ по заданным показателям качества переходного процесса.
3. Строится ЛАЧХ последовательного корректирующего звена путем графического вычитания ЛАЧХ заданной системы из желаемой ЛАЧХ.
4. По виду ЛАЧХ корректирующего звена определяется его передаточная функция (непрерывная).
3.5.1. Построение ЛАЧХ заданной системы
по виду передаточной функции
Передаточную функцию разомкнутой системы нужно представить в виде произведения передаточных функций типовых динамических звеньев (ограничимся случаем, когда в системе отсутствуют
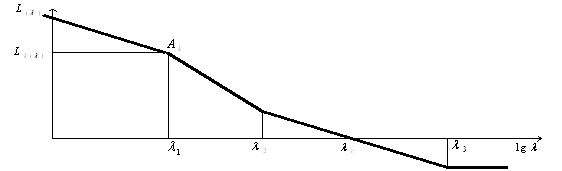
колебательные звенья и звенья с запаздыванием). Например, пусть передаточная функция разомкнутой системы имеет вид:
Построение удобно проводить в такой последовательности.
1. Определить сопрягающие частоты wi=1/Тi и отложить их по оси абсцисс в логарифмическом масштабе (Тi - постоянные времени передаточной функции Кз(Р) ).
2. Отложить точку A1 с координатами wA1=1c-1 и L(wA1)=20lgКз ( см. рис. 3). Через точку A1 провести прямую с наклоном -20 дБ/дек. Построенная таким образом прямая линия совпадает с ЛАЧХ при частотах, меньших первой сопрягающей частоты (по порядку их расположения на оси частот слева направо).
3. На частоте сопряжения wi характеристика меняет свой наклон либо на +20 дБ/дек, если постоянная времени Тi=1/ wi находится в числителе исходной передаточной функции, либо на -20 дБ/дек, если постоянная времени Тi находится в знаменателе передаточной функции.
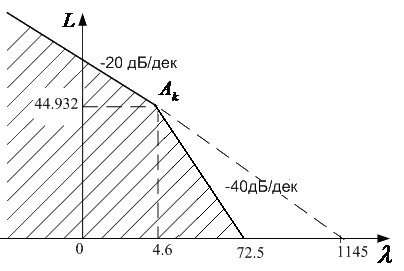
Для исследования системы на устойчивость по амплитудно-фазовому критерию устойчивости с помощью логарифмических частотных характеристик необходимо кроме ЛАЧХ построить еще логарифмическую фазо-частотную характеристику (ЛФЧХ). По оси абсцисс откладывается частота в логарифмическом масштабе (используют ту же ось частот, что и для построения ЛАЧХ), а по оси ординат откладывают аргумент амплитудно-фазовой характеристики j(w) в градусах или в радианах в линейном масштабе. Для рассматриваемого примера j(w) рассчитывается по формуле
j(w)= - 90 - arctgTу w - arctgTкзw - arctgTдw (гр.) .
такту k моменты времени.
Из последнего уравнения выразим U[k]:
U[k]=(S0X[k-n]+S1X[k-n+1]+...+SmX[k-n+m] - (7)
- G0U[k-n]-G1U[k-n+1]-. . .-Gn-1U[k-1])/Gn
Уравнение (7) является рекуррентным уравнением, описывающим алгоритм работы цифрового корректирующего устройства. По нему должна быть составлена программа работы данного устройства.
3.10. Разработка принципиальной схемы цифровой
следящей системы
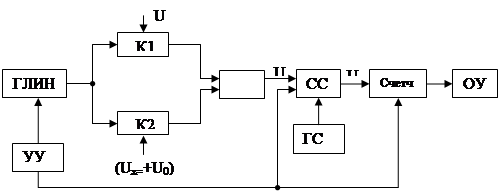
На принципиальной схеме должны быть изображены сельсин-датчик и сельсин-трансформатор, фазовый детектор, АЦП, цифровой вычислитель, ЦАП, электронный усилитель мощности, ЭМУ, двигатель, редуктор.
Проводить расчет электронных схем и изображать их развернутые принципиальные схемы не требуется.
Л И Т Е Р А Т У Р А
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. 766 с.
2. Батоврин А.А., Дашевский П.Г. и др. Цифровые следящие системы судовой автоматики. Л. : Судостроение, 1972. 445 с.
Если в результате моделирования дискретной системы качество переходного процесса окажется хуже заданного, то нужно ввести в корректирующее звено изменения. Изменения нужно вносить в непрерывную передаточную функцию, пересчитывая ее затем в дискретную. При высокой колебательности процесса можно попробовать изменить в ту или иную сторону наименьшие постоянные времени знаменателя. В некоторых случаях дает хороший результат отбрасывание наименьших постоянных времени в числителе и знаменателе.
Похожие работы
... универсальный вольтметр В7-25. Он имеет диапазон измеряемых от 1 мкВ до 100 В, основную погрешность , , подавление помех на 70 дБ. Цифровые вольтметры переменного тока Как мы уже отмечали ранее, ЦВ встречаются в пределах каждого вида вольтметров, в том числе и предназначенных для измерения напряжений переменного и импульсного токов, видов ВЗ, В4 и В7. Таким образом, входной величиной АЦП в ...

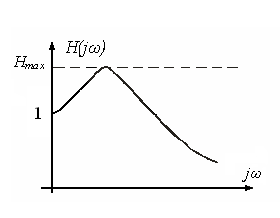


... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев