Навигация
Проектирование привода горизонтального канала наведения и стабилизации ОЭС
94678
знаков
15
таблиц
24
изображения
Министерство общего и профессионального
образования РФ
Тульский государственный университет
Кафедра автоматики и телемеханики
Проектирование привода горизонтального канала
наведения и стабилизации ОЭС
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К ДИПЛОМНОМУ ПРОЕКТУ
Тула 1998г.
Содержание
Введение........................................................................................................... 6
1. Обоснование актуальности темы и постановка задачи............................. 8
2. Обзор литературы по следящим приводам............................................. 10
3. Разработка алгоритма проектирования следящего привода.................. 13
4. Определение зависимости скорости и ускорения наведения АОП от дальности 15
5. Расчет потребной мощности ЭДВ............................................................ 18
6. Определение типа и параметров ЭДВ...................................................... 19
Наименование характеристик....................................................................... 20
7. Расчет зон работы следящего привода.................................................... 22
8. Определение параметров математической модели двигателя................. 24
9. Формирование скоростного контура привода ГН.................................. 29
10. Определение параметров корректирующих устройств скоростного привода 34
11. Формирование контура наведения и стабилизации с определением параметров корректирующих устройств......................................................................... 38
12. Определение точностных характеристик............................................... 47
13. Разработка конструкции и технология изготовления БУ следящего привода 50
13.1. Конструкция платы БУ привода.......................................................... 50
13.2. Технологическая часть......................................................................... 54
13.3. Расчет показателей надежности БУ следящего привода.................... 56
14. Охрана труда и окружающей среды...................................................... 59
14.1. Охрана труда........................................................................................ 59
14.1.1. Анализ вредных и опасных производственных факторов.............. 59
14.1.2. Требования к производственному помещению............................... 60
14.1.3. Микроклиматические условия производственного помещения и вентиляция. 62
14.1.4. Требования к освещению производственного помещения.............. 66
14.1.5. Техника безопасности....................................................................... 68
14.2. Охрана окружающей среды................................................................ 71
15. Организационно-экономический раздел................................................ 77
15.1. Составление и расчет сетевого графика.............................................. 77
15.2. Расчет затрат на проектирование и изготовление следящего электропривода 85
Заключение.................................................................................................... 93
Библиографический список........................................................................... 94
Приложения................................................................................................... 96
РефератДанный дипломный проект посвящен проектированию привода горизонтального канала наведения и стабилизации(ГКНиС) ОЭС и включает в себя расчет параметров двигателя привода, разработку скоростного и позиционного контура следящей системы, составление функциональной схемы и структурной схемы линейной математической модели следящего привода. Синтез системы производится исходя из требований по времени переброса и точности слежения за подвижным объектом в условиях воздействия качек на носитель следящей системы.
Конструкторско-технологический раздел включают в себя разработку конструкции печатной платы БУ привода, составление технологического процесса ее изготовления, производится расчет теплового режима работы платы и надежность эксплуатации устройства.
Большое внимание уделено охране труда и окружающей среды. Производится расчет параметров производства печатных плат БУ привода ГКНиС: количества людей, занятых непосредственно изготовлением изделий, размеров цеха, расстановка оборудования, вентиляции, освещения. Определяется категория пожаробезопасности производства, схема эвакуации людей при пожаре и расположение противопожарного оборудования
Экономической часть включает в себя составление сетевого плана проектирования и изготовления опытного образца привода ГКНиС ОЭС, расчет критического пути и себестоимости ОКР и стоимости опытного образца привода ГКНиС.
ВведениеАвтоматическое управление различными объектами приводит к необходимости разработки создания сложных систем, включающих в себя вычислительные машины, автоматические регуляторы, исполнительные устройства т.п.
В системах управления широкое применение получили устройства с механическим выходом, т.е. автоматизированные приводы, в которых в подавляющем большинстве случаев перемещение выходного звена пропорционально (или равно) входной управляющей координате. Автоматизированные приводы с указанными свойствами относятся к классу следящих систем.
Выходной вал следящего привода с определённой степенью точности воспроизводит в виде механического перемещения входной управляющий сигнал. При этом исполнительный двигатель должен преодолевать имеющиеся на выходном валу нагрузки (возмущающие воздействия) и развивать скорости и ускорения, обеспечивающие его слежение за входным управляющим воздействием, а система управления двигателем должна обеспечивать необходимую точность слежения, которые, как правило, должны обладать высокой динамической точностью.
Требуемые динамические свойства привода и типичные законы изменения управляющих и возмущающих воздействий зависят от назначения системы управления в целом и функций, выполняемых в ней приводом. По этим признакам следящие системы могут быть разбиты на следующие группы: приводы систем автоматического сопровождения, приводы пусковых устройств, приводы устройств гиростабилизированных платформ, приборные приводы и т.д.
Данная работа посвящена проектированию привода системы, относящейся к классу систем автоматического сопровождения (САС). К этой группе относятся приводы широкого класса систем, предназначенных для слежения за объектами, перемещающимися в пространстве (приводы систем радиолокационных камер, оптических визиров, координаторов, астроориентиров). Требования к динамике определяются законом движения объекта и условиями наилучшей фильтрации случайной составляющей входного сигнала. Необходимо учитывать и значительные возмущения в виде «ветрового момента». Приводы, установленные на подвижном основании, должны обеспечивать высокую точность отработки угловых колебаний основания.
Основные задачи проектирования состоят в выявлении требуемых динамических свойств привода, в выборе исполнительного двигателя, обладающего нужными предельными динамическими возможностями, определении метода разработки системы управления, которая при максимальной простоте и надёжности и минимальных габаритах и весе обеспечивает необходимую динамику и точность.
При проведении расчетов были использована пакеты прикладных программ МаthCAD 6.0 plus, МаthCAD 7.0 и MathLab 5.0.
1. Обоснование актуальности темы и постановка задачиАвтоматизация процессов управления различными объектами сопровождается широким использованием следящих приводов. Следящие приводы нашли применение во многих областях техники. Они используются в системах управления металлорежущими станками, металлургическими прокатными станами, шагающими экскаваторами, в системах управления манипуляторами, в моделирующих стендах, в системах управления объектами вооружения и т.д. Уже из этого краткого перечня видно, сколь значительно число задач, решение которых может быть возложено на следящие приводы.
Применение современных следящих приводов практически во всех областях хозяйства и промышленности, обусловлено необходимостью повышения качества выпускаемой продукции.
Применение современных следящих приводов в военной технике является необходимым фактором, который способствует повышению тактико-технических характеристик систем слежения и ведения огня. Точность, скорость, качество и надежность работы современного вооружения при обеспечении боевой готовности армии и в боевых условиях играет важную роль в поддержании обороноспособности страны.
Задачей данного дипломного проекта является проектирование и расчет следящего привода горизонтального канала наведения и стабилизации ОЭС, предназначенного для сопровождения объекта слежения.
Чтобы обеспечить высокие статические и динамические характеристики следящего привода необходимо правильно спроектировать и рассчитать его, чему и будет посвящена данная работа.
Исходные данные для расчета:
1) Объект слежения:
Диаметр корпуса d=0,5 м;
Длина корпуса l=4,5 м;
Скорость движения Vo=600 м/c;
Коэффициент излучения объекта e=0,8;
Характеристики движения объекта:
Параметр движения Р=500 м;
Высота движения Н=300 м;
Дальность сопровождения не менее Dc=6 км;
2) Атмосфера:
Метеовидимость Мдв=20 км;
Относительная влажность r=90%;
Температура окр. cреды t=150 C;
3) Привод:
Момент инерции вращающейся части АОП JГН = 8 кгм2 ;
Масса нагрузки mН = 170 кг ;
Максимальный возмущающий момент МВ = 50 Нм :
статический момент сопротивления повороту МСТ = 30 Нм,
аэродинамический момент МАЭР = 15 Нм,
статический момент неуравноешивания МНЕУР = 5 Нм ;
Нижняя частота собственных колебаний fK = 100 Гц ;
Углы наведения от -900 до +900 ;
Наведение : скоростьMAX = 100 0/c, ускорение =220 0/с2, скоростьMIN = 0,02 0/c.
2. Обзор литературы по следящим приводамВ настоящее время, в связи с широким применением и развитием следящих систем, имеется множество публикаций и изданий по СС. В ходе выполнения дипломного проекта был произведен поиск и обзор литературы по следящим приводам и сопутствующей тематике (ТАУ и т.п.), в результате чего получены следующие сведения.
В книге «Проектирование следящих систем» под редакцией д.т.н., профессора Л.В. Рабиновича 1969 года выпуска [1] изложены теоретические основы и методика расчета и проектирования следящих приводов. Рассмотрены метод выбора исполнительного двигателя по предельным динамическим возможностям и энергетике, синтез следящих систем, близких к линейным, обеспечивающих заданную динамическую точность. Освещены методы повышения динамической точности, основанные на комбинированном управлении и теории инвариантности, и методы учета и анализа влияния нелинейностей с использованием логарифмических характеристик. Приведены методы расчета и проектирования релейных систем, в том числе оптимальных по быстродействию, рассмотрены особенности проектирования механических передач.
В двух книгах «Следящие приводы» под редакцией д.т.н., профессора Б.К. Чемоданова 1976 г. [2] изложены основные вопросы теории и проектирования одноканальных и двухканальных следящих приводов. Рассмотрены методы анализа и синтеза как непрерывных, так и дискретных (импульсных и цифровых) следящих приводов. Значительное внимание уделено динамике следящих приводов, имеющих в своем составе различные нелинейные звенья. Приведены основные энергетические соотношения и дан анализ влияния ограничения мощности источников энергии на работу следящего привода.
Книги И.М. Макарова и Б.М. Менского «Линейные автоматические системы» 1982 года [3] и «Техническая кибернетика. Теория автоматического регулирования» под редакцией д.т.н., профессора В.В. Солодовникова 1967 года [5] содержат сведения из теории непрерывных линейных систем автоматического регулирования и обширный справочный материал для их анализа и синтеза. В них рассматриваются общие дифференциальные уравнения, методы структурного преобразования, статические и динамические характеристики САР. Основное внимание уделено стационарным системам при детерминированных внешних воздействиях. Приводятся методы анализа устойчивости, качества и переходных процессов непрерывных линейных систем. Приведено много типовых схем и примеров расчета.
Книга В.А. Бесекерского и Е.П. Попова «Теория систем автоматического регулирования» [4], представляет собой монографию, посвященную систематическому изложению теории автоматического регулирования и управления. Она содержит все основные разделы ТАУ: теорию обыкновенных и особых линейных систем, теорию нелинейных, адаптивных и цифровых систем.
В труде специалиста из ФРГ Р. Изермана «Цифровые системы управления» 1984 года [6] рассмотрены современные методы расчета и проектирования цифровых систем управления с детерминированными и случайными возмущениями. Значитель-ное внимание уделено теории многосвязанных и адаптивных систем.
Книга Х. Гурецкого «Анализ и синтез систем управления с запаздыванием» 1974 года [7] посвящена изложению методов анализа линейных, нелинейных и импульсных систем автоматического регулирования с запаздыванием и методов выбора параметров типовых регуляторов. Большое внимание уделено математическому описанию и идентификации объектов регулирования с запаздыванием.
В учебнике М.А. Павловского «Теория гироскопов» 1986 г. [8] излагаются основы теории механических гироскопов, дана элементарная теория гироскопов и гироскопических явлений. Значительное внимание уделено методам составления уравнений (как точных, так и приближенных) движения гироскопов как системы твердых тел. Рассмотрены особенности поведения двух- и трехстепенных гироскопов как на неподвижном, так и на движущемся основании с учетом моментов сил сухого, вязкого трения, технологических погрешностей изготовления и сборки приборов, упругих деформаций элементов подвеса.
Показано влияние различных типов коррекции гироскопов на их устойчивость и погрешности на подвижном основании. Приведены различные методы уменьшения возмущающих моментов и автокомпенсации уходов гмроскопа (применением двухгироскопных систем, вращением подвеса, применением динамических поглотителей колебаний, виброзащиты). Указаны возмущающие моменты, которые не устраняются тем или иным методом.
Кратко изложена теория невозмущающих маятников.
Должное внимание уделено изложению основ теории и причин погрешностей вибрационных гироскопов различных типов.
В учебнике А.А. Одинцова «Теория и расчет гироскопических приборов» 1985 года выпуска [9] рассмотрны гироскопические приборы двух типов: построители характерных направлений в опорной (как правило, земной) системе координат (гирокомпасы, гировертикали, гирокомпасы направлений и др.) и измерительные преобразователи параметров движения объектов (гиротахометры, гироинтеграторы линейных ускорений и др.)
Изложены принципы построения и работы приборов, методика составления их математических моделей с учетом основных помех, расчет погрешностей, пути повышения точности измерений.
3. Разработка алгоритма проектирования следящего приводаСледящий привод, установленный на подвижном основании обычно замкнут по углу поворота нагрузки. С целью улучшения динамических характеристик он может содержать местную обратную связь по скорости двигателя или скорости нагрузки, компенсирующие связи по управляющему и возмущающему воздействиям. Алгоритм проектирования следящего привода представлен на рисунке 3.1.
Приводы полуавтоматических систем слежения, размещенные на неподвижном основании, замыкаются по скорости исполнительного двигателя. Поэтому целесообразно рассмотреть вначале проектирование замкнутого по скорости привода.
Анализ динамических возможностей и энергетических характеристик привода является важным этапом процесса проектирования, который следует проводить непосредственно после выявления технических требований к приводу.
Значения скоростей и ускорений, которые может развивать реальный привод, ограниченный по величине. Если требуемые скорости и ускорения выше тех значений, которые способен обеспечивать привод, то попытки получения удовлетворительного функционирования привода введением каких - либо корректирующих устройств будут безуспешны. Никакая система управления исполнительным двигателем не может обеспечить требуемые моменты или скорости, если они не заложены в самой конструкции исполнительного механизма. Корректирующие устройства предназначены для обеспечения требуемой точности привода и более полного использования его динамических возможностей.
Мощность, которую привод может рассеивать, не нагреваясь свыше допустимой температуры, также ограничена по величине. Если мощность, теряемая в приводе в процессе работы в заданном режиме, выше допустимой, то необходимо использовать дополнительные меры охлаждения, сократить время работы или применить другой, более мощный привод. Поэтому анализ энергетических характеристик привода также должен предшествовать расчету его динамики.
Анализ динамических возможностей и энергетических характеристик привода целесообразно проводить на этапе выбора исполнительного двигателя, который осуществляется методом последовательных приближений, т.е. пригодность выбранного в первом приближении двигателя проверяется детальным анализом его динамических возможностей и энергетических характеристик.
Алгоритм проектирования следящего привода
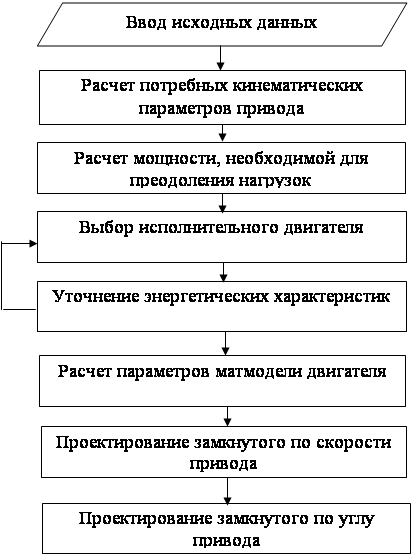
Рисунок 3.1.
4. Определение зависимости скорости и ускорения наведения АОП от дальностиОпределим угловые скорости и ускорения привода, моменты времени, когда они достигают экстремальных значений.
Исходными данными для расчета являются:
- закон движения и его параметры;
- параметры угловых колебаний подвижного основания.
1)В проектируемой следящей системе реализуется закон равномерного прямолинейного движения, характеризующийся постоянными значениями линейной скорости объекта слежения Vo, высоты Н, параметра движения объекта Р:
Характеристики горизонтального канала
![]() (4.1)
(4.1)
где ![]() , - время слежения от начала процесса до момента прохождения параметрового участка (ОУ);
, - время слежения от начала процесса до момента прохождения параметрового участка (ОУ);
![]() , -коэффициент.
, -коэффициент.
Угловая скорость
![]() (4.2)
(4.2)
Угловое ускорение
 (4.3)
(4.3)
Графики, характеризующие закон движения представлены на рисунке 4.1.
Максимальные значения характеристик горизонтального канала можно определить по следующим формулам:
![]() МАКС = V0/P, (4.4)
МАКС = V0/P, (4.4)
где ![]() МАКС - максимальная угловая скорость.
МАКС - максимальная угловая скорость.
![]() МАКС = 0,65×V02/P2, (4.5)
МАКС = 0,65×V02/P2, (4.5)
где ![]() МАКС - максимальная угловое ускорение.
МАКС - максимальная угловое ускорение.
2)Угловые колебания подвижного основания заданы гармоническим законом:
![]() (4.6)
(4.6)
где A=50 -амплитуда колебаний подвижного основания,
![]() - частота колебаний подвижного основания.
- частота колебаний подвижного основания.
fk=0,8
Угловая скорость колебаний подвижного основания
![]() (4.7)
(4.7)
Графики закона движения.
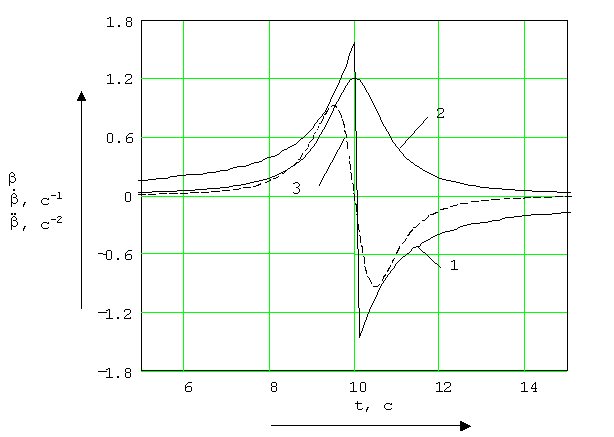
1 – положение объекта слежения b, рад;
2 – скорость движения объекта слежения ![]() , с-1;
, с-1;
3 – ускорение объекта слежения ![]() , с-2.
, с-2.
Рисунок 4.1.
Максимальная угловая скорость колебаний
![]() (4.8)
(4.8)
Угловое ускорение колебаний подвижного основания
![]() (4.9)
(4.9)
Максимальное угловое ускорение колебаний
![]() (4.10)
(4.10)
На основе проведенных расчетов получены следующие данные :
![]() МАКС = 1,2 рад/c
МАКС = 1,2 рад/c
![]() МАКС = 0,935 рад/c2
МАКС = 0,935 рад/c2
![]() = 5,027 рад/c
= 5,027 рад/c
![]() = 0,439 рад/c
= 0,439 рад/c
![]() = 2,205 рад/c2
= 2,205 рад/c2
Расчет мощности, необходимой для преодоления нагрузки, проводим по следующим формулам:
![]() (5.1)
(5.1)
где ![]() - суммарный момент нагрузки,
- суммарный момент нагрузки,
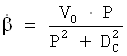
![]() - суммарная скорость.
- суммарная скорость.
![]() (5.2)
(5.2)
![]() рад/c
рад/c
![]() (5.3)
(5.3)
где ![]() - момент двигателя без нагрузки.
- момент двигателя без нагрузки.
![]() (5.4)
(5.4)
![]() Нм
Нм
![]() 50+25,122=75,122 Нм
50+25,122=75,122 Нм
Таким образом получаем:
![]() Вт
Вт
На основании расчетов был выбран бесконтактный моментный электродвигатель с номинальным моментом 120 Нм. Полное наименование - бесконтактный моментный электродвигатель постоянного тока ДБМ. Служит для систем стабилизации и наведения по двум каналам - горизонтальному и вертикальному (ГН и ВН). Параметры электродвигателя представлены в таблице 6.1.
В состав ДБМ входят :
1) бесконтактный моментный электродвигатель (Д);
2) сборки статора и ротора датчика угла (ДУ);
3) блок обработки сигнала датчика угла (БОСДУ);
4) силовой коммутатор двигателя (К);
5) сборки статора и ротора тахогенератора (ТГ);
6) блок обработки сигнала тахогенератора (БОСТГ);
7) оконечное устройство (ОУ).
Сигнал управления электродвигателем - аналоговый, постоянного тока, двуполярный, общая точка электрически не связана с минусом источника питания 27 В.
Зона нелинейности ±12 В.
Величина входного сигнала, соответствующая номинальным параметрам электродвигателя +12 В, -12 В.
Блок обработки сигналов датчика угла выдает :
1) сигнал по положению ротора для обеспечения силового коммутатора ;
2) цифровой сигнал по углу поворота вала двигателя, при этом реализуется преобразователь угол - код, обеспечивающий измерение и выдачу в цифровую вычислительную систему (ЦВС) углов поворота вала с ошибкой не более 20 угловых секунд, разрядности не менее 16.Диапазон измерительных углов 0-360°, максимальная угловая скорость 66 об./мин. Обмен информацией между аппаратурой ДБМ и ЦВС производится по магистральному последовательному интерфейсу, при этом ЦВС выполняет функции контролера, а оконечное устройство (ОУ) входит в состав аппаратуры электродвигателя.
Таблица 6.1.
Параметры электродвигателя
| № | Наименование характеристик | Значение |
| |||
| 1 | Номинальная частота вращения Wном, об/мин | 20,0 | |||
| 2 | Минимальная частота вращения Wмин, об/мин | 0,1 | |||
| 3 | Номинальный момент Мном, Нм | 120,0 | |||
| 4 | Пусковой момент Мп, Нм | 240,0 | |||
| 5 | Номинальный ток Iном, А | 20,0 | |||
| 6 | Пусковой ток Iп, А | 40,0 | |||
| 7 | Номинальное напряжение питания U, В | 57,0 | |||
| 8 | Сопротивление статорной обмотки Rс, Ом | 1,4 | |||
| 9 | Электромагнитная постоянная времени Тэл,мс | 10,0 | |||
| 10 | Размеры: - наружный диаметр статора, мм - внутренний диаметр электродвигателя, мм - длина, мм | 240,0 70,0 120,0 | |||
| 11 | Масса электродвигателя mдв, кг - ротора, кг - статора с обмотками, кг - тахогенератора, кг - датчика угла, кг - корпуса, кг | 33,5 14,5 15,0 1,0 1,0 2,0 | |||
| 12 | Момент инерции ротора Jр, кгм2 | 0,1 | |||
| 13 | Момент инерции нагрузки Jн, кгм2 | 8,0 | |||
| 14 | Максимальный момент сопротивления Jc, Нм | 50,0 | |||
3) Сигнал по частоте вращения ротора - 12-ти разрядный код, преобразованный в аналоговый сигнал. Крутизна сигнала 12 В на 20 об./мин.
Частота обновления информации 1 кГц. Оконечное устройство обеспечивает сопряжение электрической аппаратуры БОСДУ электродвигателя по цифровому каналу с ЦВС комплекса, выполняет адресованные ему команды ЦВС и осуществляет контроль принимаемой информации. ОУ - является устройством интерфейса по ГОСТ 26765,52 - 87.
Надежность:
· наработка на отказ более 20000 часов.
· ресурс работы 30000 часов.
· срок службы 25 лет.
Технико - экономические требования:
Предприятие изготовитель ВНИИМЭМ(г. Санкт- Петербург).
Ориентировочная годовая потребность 40 шт. в течение 4-х лет начиная с 1999 г. Цена серийного образца 3000 у.е.
7. Расчет зон работы следящего приводаПространственная область применения следящих приводов может быть оценена путем построения зон предельных скоростей и ускорений приводов. Пространство внутри зоны является запретным.
Наглядное представление о зоне дает изометрическая проекция, построенная в трехмерном координатном пространстве (H, P, Dс), но чаще всего строят вертикальные и горизонтальные сечения зон. Вертикальное сечение представляет собой проекцию пространственной зоны на координатную плоскость (Н, Dс), вычисленную в предположении Р = const , Vо = const, Н = var, Dс = var.
Горизонтальное сечение представляет собой проекцию пространственной зоны на координатную плоскость (Р, Dс), вычисленную в предположении Н = const, Vо = const, Р = var, Dс = var. Диапазоны изменения Vо, Р, Н, Dс задаются техническим заданием.
В качестве предельных значений скоростей и ускорений могут рассматриваться максимальные располагаемые характеристики, рассчитанные по формулам (4.4), (4.5) или определенные по графикам (см. рисунок 4.1).
Перепишем формулы расчета кинематических характеристик горизонтального канала (4.2) и (4.3) в следующем виде:
 (7.1)
(7.1)
 (7.2)
(7.2)
Если в левых частях формул (7.1) и (7.2) текущие значения ![]() и
и ![]() заменить их предельными значениями
заменить их предельными значениями ![]() МАКС и
МАКС и ![]() МАКС (см. пункт 4), то получим выражения для запретных зон по скоростям и ускорениям, которые представляют собой решения нелинейных алгебраических уравнений.
МАКС (см. пункт 4), то получим выражения для запретных зон по скоростям и ускорениям, которые представляют собой решения нелинейных алгебраических уравнений.
Используя метод последовательных итераций решим эти уравнения с учетом ограничений по предельным значениям скорости и ускорения наведения горизонтального канала привода, предъявленные техническим заданием (см. тех. задание и пункт 1). Решение уравнений представляют собой зоны работы горизонтального канала следящего привода, изображенную на рисунке 7.1.
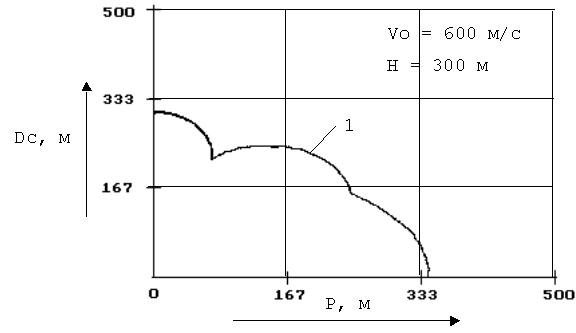 |
Зоны работы горизонтального канала следящего привода
1 – запретная зона горизонтального канала
по скорости и ускорению
Рисунок 7.1.
8. Определение параметров математической модели двигателяИспользуя параметры двигателя из базы данных, определим параметры матмодели:
· скорость холостого хода
 (8.1)
(8.1)
где Мп - пусковой момент;
Мном - номинальный момент;
Wном - номинальная скорость;
· электромеханическая постоянная времени
а)собственно двигателя
 (8.2)
(8.2)
где Jдв - момент инерции двигателя.
б)двигателя с учетом нагрузки
 (8.3)
(8.3)
где JS=Jдв+Jр+Jтг+![]() - суммарный момент инерции. коэффициент передачи по моменту
- суммарный момент инерции. коэффициент передачи по моменту
 (8.4)
(8.4)
· коэффициент противоэдс
 (8.5)
(8.5)
· номинальная электрическая мощность
Pэ=Uном Jном (8.6)
· номинальная механическая мощность
Рном=Мном Wном (8.7)
· уравнениемеханическойхарактеристики
 (8.8)
(8.8)
(для напряжения питания ,отличного от Uном).
Механическая характеристика двигателя.
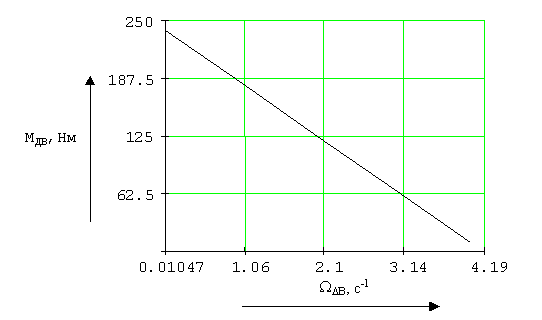
Рисунок 8.1.
· уравнение регулировочной характеристики
 (8.9)
(8.9)
Регулировочная характеристика двигателя.
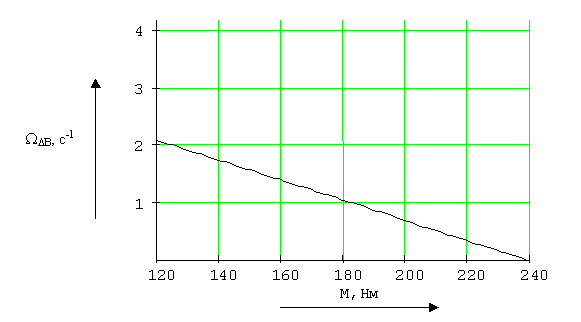
Рисунок 8.2.
· максимальная механическая мощность
 (8.10)
(8.10)
· сопротивление цепи статора
RC=UНОМ/IНОМ (8.11)
· индуктивность цепи статора
![]() (8.12)
(8.12)
Упрощенная схема матмодели двигателя постоянного тока может быть представлена структурной схемой:
Структурная схема двигателя.
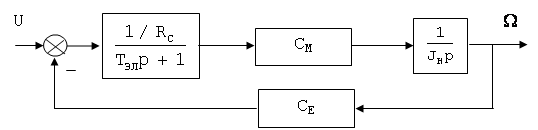
Рисунок 8.3.
В результате проведенных выше расчетов получены следующие данные (см. таблицу 8.1.).
Результаты экспериментальных замеров параметров электродвигателя представлены в приложении 1.
Используя параметры математической модели двигателя и теорию замкнутых систем, изложенную в литературе [3,4,5], найдем передаточную функцию ЭДВ без нагрузки.
 , (8.13)
, (8.13)
 , (8.14)
, (8.14)
где WДВБН(р)- передаточная функция ЭДВ без нагрузки;
р = i×w , i=![]() .
.
Построим для передаточной функции двигателя логарифми-ческие амплитудную и фазовую частотные характеристики (ЛАЧХ и ЛФЧХ), по методике изложенной в литературе [3].
LДВБН(w)= 20×lg(|WДВБН(р)|), (8.15)
где LДВБН(w)- логарифмическая амплитудная частотная характе-ристика двигателя под нагрузкой.
jДВБН(w)= arg(WДВБН(р)), (8.16)
где jДВБН(w)- логарифмическая фазовая частотная характерис-тика двигателя под нагрузкой.
Таблица 8.1.
Параметры матмодели ЭДВ
| № | Параметр | Значение | |
| без нагрузки | с нагрузкой | ||
| 1 | Тм, мс | 1,745 | 141,000 |
| 2 | Jдв, кгм2 | 0,100 | 8,100 |
| 3 | Wхх, рад/с | 4,189 | |
| 4 | См, Вс | 6,000 | |
| 5 | Се, Вс | 13,608 | |
| 6 | Рэ, Вт | 1140,000 | |
| 7 | Рном, Вт | 251,327 | |
| 8 | Рмакс, Вт | 251,327 | |
| 9 | Lc, Гн | 0,014 | |
| 10 | Rc, Ом | 1,425 | |
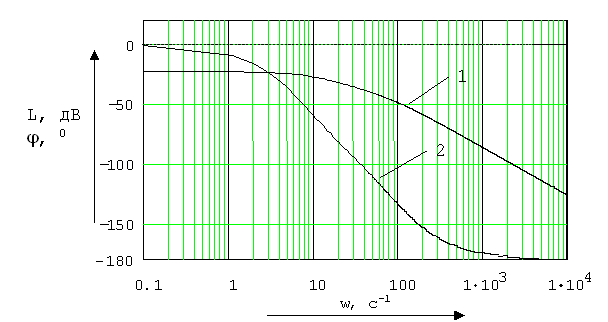
Логарифмические амплитудная и фазовая частотные характеристики двигателя под нагрузкой представлены на рисунке 8.4.
Логарифмические амплитудная и фазовая частотные характеристики двигателя без нагрузки.
1 – Логарифмические амплитудная частотная характерис-тика LДВБН, дВ;
2 - Логарифмические фазовая частотная характеристика jДВБН, 0.
Рисунок 8.4.
9. Формирование скоростного контура привода ГНПроектирование замкнутого по скорости привода подразумевает выбор усилительных устройств, корректирующих и сглаживающих устройств, обеспечивающих наилучшие динамические характеристики (точность, диапазон регулирования, неравномерность движения на малых скоростях).
Пользуясь теоретическими положениями, описанными в литературе [1,7], разработаем структурную и функциональную схемы скоростного контура привода горизонтального наведения и стабилизации ОЭС.
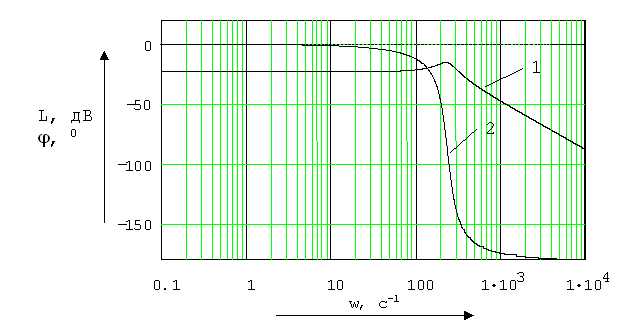
Функциональная схема скоростного контура следящего привода ГН представлена на рисунке 9.1.
Совокупность усилительных, корректирующих и сглаживающих устройств образуют систему управления приводом.
Функциональная
 |
схема скоростного контура.
Рисунок 9.1.
Структурная схема скоростного контура следящего привода ГН представлена на рисунке 9.2.
Структурная 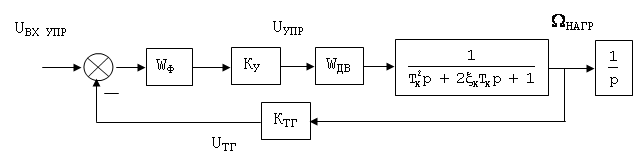
схема скоростного контура.
Рисунок 9.2.
е в пункте 8 найдем передаточную функцию ЭДВ, находящегося под нагрузкой.
 (9.1)
(9.1)
 (9.2)
(9.2)
где WДВ(р)- передаточная функция ЭДВ, находящегося под нагрузкой.
Построим для передаточной функции двигателя логарифми-ческие амплитудную и фазовую частотные характеристики (ЛАЧХ и ЛФЧХ), по методике изложенной в литературе [3].
LДВ(w)= 20×lg(|WДВ(р)|), (9.3)
где LДВ(w)- логарифмическая амплитудная частотная характеристика двигателя под нагрузкой.
jДВ(w)= arg(WДВ(р)), (9.4)
где jДВ(w)- логарифмическая фазовая частотная характеристика двигателя под нагрузкой.
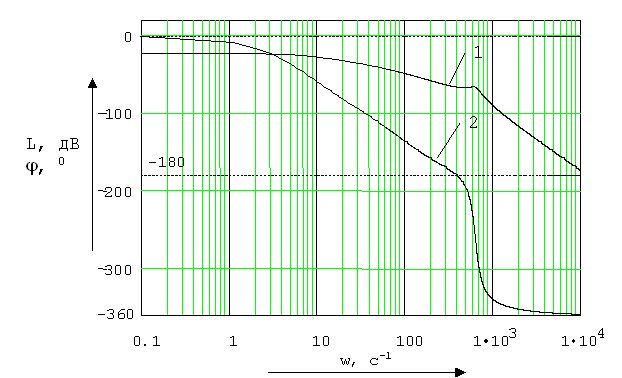
Логарифмические амплитудная и фазовая частотные характеристики двигателя под нагрузкой представлены на рисунке 9.3.
Двигатель приводит в движение нагрузку с помощью вала, нижняя частота собственных колебаний которого fk = 100 Гц (оговорено в ТЗ). Передаточная функция вала представляет собой колебательное звено:
![]() , (9.5)
, (9.5)
где ![]() ,-постоянная времени колебательного звена, ТК = 1,592 мс;
,-постоянная времени колебательного звена, ТК = 1,592 мс;
xК – показатель колебательности, xК = 0,1..0,15, примем
xК = 0,125
Система «двигатель-вал-нагрузка» имеет передаточную функцию:
WДВК(р)= WДВ(р)× WК(р) (9.6)
Построим ЛАЧХ и ЛФЧХ системы «двигатель-вал-нагрузка»:
LДВК(w)= 20×lg(|WДВК(р)|) (9.7)
где LДВК(w)- ЛАЧХ системы «двигатель-вал-нагрузка».
jДВК(w)= arg(WДВК(р)) (9.8)
где jДВК(w)- ЛФЧХ системы «двигатель-вал-нагрузка».
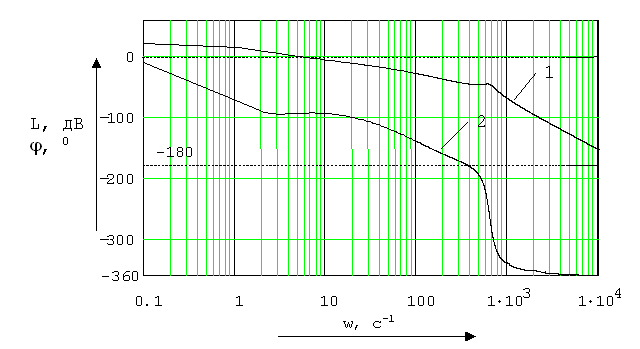
ЛАЧХ и ЛФЧХ системы «двигатель-вал-нагрузка» представлены на рисунке 9.4.
Чтобы обеспечить запас по фазе системы в пределах 300¸ 600 и максимально-возможную частоту среза wСР, скорректируем систему «двигатель-вал-нагрузка». Выберем частоту среза wСР= 80 c-1 (fCP= wСР/2×p, fCP= 12,732 Гц).
Запас по фазе, в данном случае, равен:
Dj = 1800+ jДВК(wСР)= 52,7120.
Чтобы скорректировать систему «двигатель-вал-нагрузка» поднимем её ЛАЧХ на величину LДВК(wСР), т.е. помножим WДВК(р) на коэффициент:
![]() (9.9)
(9.9)
КСР = 185,922
Таким образом, передаточная функция скорректированной системы «двигатель-вал-нагрузка», будет выглядеть следующим образом:
WДВККОР(р)= КСР×WДВ(р)× WК(р) (9.10)
Построим ЛАЧХ и ЛФЧХ скорректированной системы «двигатель-вал-нагрузка» по следующим формулам (соответственно):
LДВККОР(w)= 20×lg(|WДВККОР(р)|) (9.11)
jДВККОР(w)= arg(WДВККОР(р)) (9.12)
ЛАЧХ и ЛФЧХ скорректированной системы «двигатель-вал-нагрузка» представлены на рисунке 9.5.
Определим коэффициент разомкнутой системы следующим образом:
![]() (9.13)
(9.13)
КР = 13,547
Логарифмические амплитудная и фазовая частотные характеристики двигателя под нагрузкой.
1 – Логарифмические амплитудная частотная характерис-тика двигателя под нагрузкой LДВ, дВ;
2 - Логарифмические фазовая частотная характеристика двигателя под нагрузкой jДВ, 0.
Рисунок 9.3.
ЛАЧХ и ЛФЧХ системы «двигатель-вал-нагрузка».
1 – ЛАЧХ системы «двигатель-вал-нагрузка» LДВК, дВ;
2 - ЛФЧХ системы «двигатель-вал-нагрузка» jДВК, 0.
Рисунок 9.4.
ЛАЧХ и ЛФЧХ скорректированной системы «двигатель-вал-нагрузка»

1 – ЛАЧХ скорректированной системы «двигатель-вал-нагрузка» LДВККОР, дВ;
2 - ЛФЧХ скорректированной системы «двигатель-вал-нагрузка» jДВККОР, 0.
Рисунок 9.5.
10. Определение параметров корректирующих устройств скоростного приводаПолученный коэффициент разомкнутой системы мал, и в дальнейшем система не будет удовлетворять статическим и динамическим требованиям. Чтобы увеличить коэффициент разомкнутой системы добавим в систему корректирующее устройство – фильтр. Вид передаточной функции фильтра и её параметров выберем исходя из тех же требований: обеспечение запаса по фазе разомкнутой системы в пределах 300¸600 и максимально-возможной частоты среза wСР.
Следуя вышеописанному выбираем фильтр со следующей передаточной функцией:
 , (10.1)
, (10.1)
со следующими параметрами:
Т1= 0,3 с, Т2= 0,2 с, Т3= 1 с.
Таким образом, вид передаточной функции разомкнутой системы «фильтр-двигатель-вал-нагрузка» примет следующий вид:
WДВКФ(р)= КСР×WДВ(p)×WK(p)×WФ(р) (10.2)
Построим ЛАЧХ и ЛФЧХ системы «фильтр-двигатель-вал-нагрузка» по следующим формулам (соответственно):
LДВКФ(w)= 20×lg(|WДВКФ(р)|) (10.3)
jДВКФ(w)= arg(WДВКФ(р)) (10.4)
ЛАЧХ и ЛФЧХ системы «фильтр-двигатель-вал-нагрузка» представлены на рисунке 10.1.
Так как частота среза уменьшилась, то необходимо её увеличить до прежнего уровня (wСР=70 с-1), т.е. домножить передаточную функцию разомкнутой системы на коэффициент ![]() , КФ = 16,622.
, КФ = 16,622.
Теперь запас устойчивости системы на частоте среза равен:
DjСК = 1800 + jДВКФ(wСР)= 48,1220 (см. рисунок 10.1), что
вполне допустимо.
Окончательный вид передаточной функции разомкнутого скоростного контура привода ГН имеет следующий вид:
WРАЗСК(р)= КСР×КФ×WДВ(p)×WK(p)×WФ(р) (10.5)
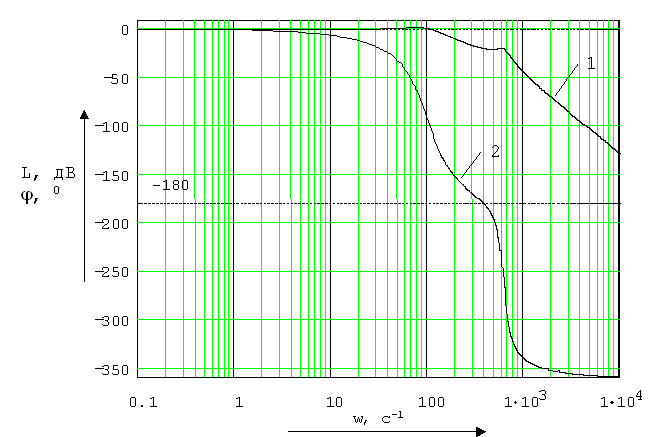
Построим ЛАЧХ и ЛФЧХ разомкнутого скоростного контура привода ГН по следующим формулам (соответственно):
LРАЗСК(w)= 20×lg(|WРАЗСК(р)|) (10.6)
jРАЗСК(w)= arg(WРАЗСК(р)) (10.7)
ЛАЧХ и ЛФЧХ разомкнутого скоростного контура привода ГН представлены на рисунке 10.2.
ЛАЧХ и ЛФЧХ системы «фильтр-двигатель-вал-нагрузка».
1 – ЛАЧХ системы «фильтр-двигатель-вал-нагрузка» LДВКФ, дВ;
2 - ЛФЧХ системы «фильтр-двигатель-вал-нагрузка» jДВКФ, 0.
Рисунок 10.1.
Запас устойчивости системы по фазе на частоте среза равен:
DjСК = 1800 + jРАЗСК(wСР)= 48,1220 (см. рисунок 10.2).
Запас устойчивости по амплитуде скоростного контура:
DCK= -LРАЗСК(w180)= 20,415 дВ,
где w180- частота, при которой jРАЗСК= -1800 ,
что вполне допустимо.
Коэффициент разомкнутого скоростного контура равен:
![]() , (10.8)
, (10.8)
КРСК = 119,879.
Передаточная функция скоростного контура следящего привода (замкнутой системы) определяется следующим выражением:
 (10.9)
(10.9)
ЛАЧХ и ЛФЧХ разомкнутого скоростного
контура привода ГН.
1 – ЛАЧХ разомкнутого скоростного контура привода ГН LРАЗСК, дВ;
2 - ЛФЧХ разомкнутого скоростного контура привода ГН
jРАЗСК, 0.
Рисунок 10.2.
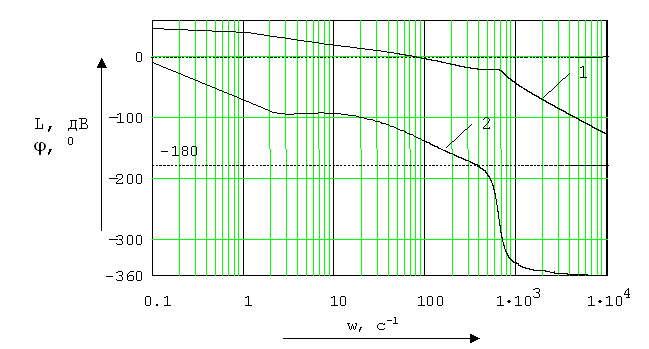
Построим логарифмические амплитудную и фазовую частотные характеристики замкнутого скоростного контура по следующим формулам (соответственно):
LЗСК(w)= 20×lg(|WЗСК(р)|) (10.10)
jЗСК(w)= arg(WЗСК(р)) (10.11)
Логарифмические амплитудная и фазовая частотные характеристики замкнутого скоростного контура представлены на рисунке 10.3.
Логарифмические амплитудная и фазовая частотные характеристики замкнутого скоростного контура
1 – Логарифмические амплитудная частотная характерис-тика замкнутого скоростного контура LЗСК, дВ;
2 - Логарифмические фазовая частотная характеристика замкнутого скоростного контура jЗСК, 0.
Рисунок 10.3.
11. Формирование контура наведения и стабилизации с определением параметров корректирующих устройствОпределим требования, предъявляемые контуру наведения и стабилизации (позиционного контура):
0 комментариев