Навигация
Выбор исполнительного двигателя
33627
знаков
6
таблиц
0
изображений
3.2. Выбор исполнительного двигателя
Выбор двигателя начинают с расчета требуемой мощности, которая должна быть достаточной для обеспечения заданных скорости и ускорения объекта управления при заданной нагрузке.
Требуемая мощность, Вт:
где hр - КПД редуктора, hр = 0,72 .
По каталогу (прил.2) выбираем ближайший двигатель большей мощности Рн > Ртр и выписываем его паспортные данные:
Рн - номинальная мощность (Вт);
nн - номинальная скорость вращения (об/мин);
Uн - номинальное напряжение (В);
Iн - номинальный ток якоря (А);
Rд- сопротивление цепи обмотки якоря (Ом);
Jд - момент инерции якоря (кг.м2);
hд- КПД двигателя.
Затем последовательно определяем следующие величины:
номинальная угловая скорость двигателя wн (с-1) -
wн = pnн/30 ;
номинальный момент двигателя Мн (Н.м) -
Мн = 9,55Рн/nн ;
оптимальное передаточное число редуктора iр -
Jр = 1.10-4 кг.м2 - момент инерции редуктора.
35 PRINT "R(P)=K*(T1(1)*P+1)*(T1(2)*P+1)*...*(T1(N)*P+1)"
36 PRINT "Q(P)=(T2(1)*P+1)*(T2(2)*P+1)*...*(T2(N)*P+1)"
60 PRINT "Искомая дискретная передаточная функция имеет вид:"
70 PRINT "K(Z)=S(Z)/G(Z), где"
80 PRINT "S(Z)=S(0)+S(1)*Z+S(2)*Z^2+...+S(N)*Z^N"
90 PRINT G(Z)=G(0)+G(1)*Z+G(2)*Z^2+...+G(N)*Z^N+G(N+1)*
*Z^(N+1)"
100 DIM A(5), B(5), B1(5), S(5), S1(5), G(6), T1(5), T2(5)
102 FOR I = 0 TO 5
104 A(I) = 0: B(I) = 0: S(I) = 0: G(I) = 0
106 NEXT I
108 R = 1
110 PRINT "Введите порядок полинома Q(P) -N, N<=5"
120 PRINT "N="
130 INPUT N
131 PRINT "Задайте величину коэффициента F"
132 PRINT "F="
133 INPUT F
134 IF F = 1 GOTO 140
135 IF F = 2 GOTO 2060
136 GOTO 131
140 PRINT "Введите коэффициенты числителя В(0)...В(N)"
150 FOR I = 0 TO N
160 PRINT "B("; I; ")="
170 INPUT B(I)
180 NEXT I
190 PRINT "Введите коэффициенты знаменателя A(0)...A(N)"
200 FOR I = 0 TO N
210 PRINT "A("; I; ")="
220 INPUT A(I)
230 NEXT I
240 PRINT "Введите период квантования по времени Т"
250 PRINT "T="
260 INPUT T
270 V0 = B(0) * T ^ N: V1 = 2 * B(1) * T ^ (N - 1)
Приложение 3 Технические данные ЭМУ
| Тип ЭМУ | Мощ- | Мощн. управ- | Напря- | Ток якоря | Сопрот. обмот- | Постоянные Ту Ткз | |
| кВт | Вт | В | А | Ом | с | с | |
| ЭМУ-3А3 | 0,2 | 0,4 | 115 | 1,75 | 1000 | 0,005 | 0,018 |
| ЭМУ-5А3 | 0,5 | 0,4 | 115 | 4,35 | 1000 | 0,01 | 0,033 |
| ЭМУ-12А3 | 1,0 | 0,4 | 115 | 8,7 | 2200 | 0,015 | 0,06 |
| ЭМУ-25А3 | 2,0 | 0,4 | 230 | 9,1 | 1500 | 0,02 | 0,1 |
| ЭМУ-50А3 | 4,0 | 0,5 | 230 | 17,4 | 2200 | 0,03 | 0,17 |
| ЭМУ-70А3 | 6,0 | 0,5 | 230 | 26 | 1500 | 0,04 | 0,22 |
| ЭМУ-100А3 | 8,5 | 0,5 | 230 | 37 | 1000 | 0,06 | 0,28 |
Приложение 4
Программа расчета коэффициентов дискретной передаточной функции по коэффициентам непрерывной передаточной функции
10 REM Определение дискретной передаточной функции по непрерывной
11 REM Используется билинейное преобразование
12 REM P=2*(Z-1)/(T*(Z+1))
20 PRINT "Исходная передаточная функция должна быть представлена в виде"
30 PRINT "K(P)=R(P)/Q(P), возможны две формы представления"
31 PRINT "Форма 1 - F=1:"
32 PRINT "R(P)=B(0)+B(1)*P+B(2)*P^2+...+B(N)*P^N"
33 PRINT "Q(P)=A(0)+A(1)*P+A(2)*P^2+...+A(N)*P^N"
34 PRINT "Форма 2 - F=2:"
Определяем требуемый момент на валу двигателя:
Выбранный двигатель нужно проверить, удовлетворяет ли он по моменту и скорости в соответствии со следующими условиями:
Мтр/Мн £ l ; wo max iр / wн £ a ;
где l - коэффициент допустимой перегрузки двигателя по моменту (для двигателя постоянного тока l = 10 ); a - коэффициент допустимого кратковременного увеличения скорости двигателя сверх номинальной, обычно a = 1,2 - 1,5.
Пример.
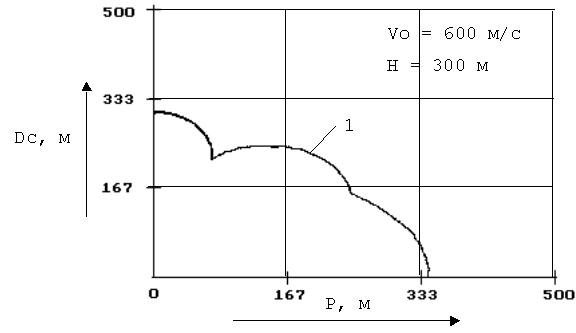
Выбрать исполнительный двигатель следящей системы, если согласно техническому заданию: Jо= 100 кг.м2;
Мос= 120 Нм; wоmax= 0,7 с-1; eomax= 0,44 с-2 ; hр = 0,72.
Требуемая мощность двигателя
Ртр = 2(120 + 100. 0,44). 0,7 /0,72 = 319 Вт .
Выбираем двигатель типа МИ-22 (прил.2) со следующими параметрами: Рн = 370 Вт; Uн = 110 В; nн = 3000 об/мин;
Jд = 0,004 кг.м2.
Зададимся моментом инерции редуктора, приведенного к валу двигателя Jр=1.10-4 кг.м2, найдем передаточное число редуктора
Требуемый момент
Номинальный момент выбранного двигателя равен:
Проведем проверку двигателя:
по моменту - 1,28/1,18< 10 ;
по скорости - 0,7.355/314 = 0,79 < 1,5 .
В результате проверок двигателя по моменту и скорости видно, что он не перегружен. Следовательно, двигатель МИ-22 выбран правильно.
3.3. Выбор усилителя мощности
В качестве усилителя мощности используем ЭМУ с поперечным полем. При выборе усилителя необходимо соблюдать следующие условия.
1. Номинальная мощность усилителя должна удовлетворять неравенству
Рун ³ Рн / hд ,
где hд - КПД двигателя.
2. Номинальное напряжение усилителя должно быть не меньше номинального напряжения исполнительного двигателя.
3. Номинальный ток усилителя должен быть не меньше, чем номинальный ток двигателя.
Учитывая указанные условия выбираем тип ЭМУ (см. прил. 3).
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| МИ-32 | 0,76 | 2500 | 110 | 8,2 | 0,368 | 80 | 0,0132 |
| 0,45 | 1500 | 110 | 5,0 | 0,975 | 75 | 0,0132 | |
| 0,37 | 1000 | 110 | 4,2 | 2,21 | 73 | 0,0132 | |
| 0,76 | 2500 | 220 | 4,1 | 1,36 | 80 | 0,0132 | |
| 0,37 | 1000 | 220 | 2,1 | 8,37 | 73 | 0,0132 | |
| МИ-41 | 1,6 | 2500 | 110 | 19,5 | 0,249 | 73 | 0,035 |
| 1,1 | 1500 | 110 | 13,0 | 0,67 | 74 | 0,035 | |
| 0,76 | 1000 | 110 | 9,0 | 1,3 | 72 | 0,035 | |
| 1,6 | 2500 | 220 | 9,5 | 0,93 | 73 | 0,035 | |
| 1,1 | 1500 | 220 | 6,4 | 2,63 | 75 | 0,035 | |
| 0,76 | 1000 | 220 | 4,5 | 5,32 | 72 | 0,035 | |
| МИ-42 | 3,2 | 2500 | 110 | 36,3 | 0,1 | 78 | 0,065 |
| 1,6 | 1500 | 110 | 18,2 | 0,32 | 78 | 0,065 | |
| 1,1 | 1000 | 110 | 12,6 | 0,75 | 75 | 0,065 | |
| 3,2 | 2500 | 220 | 18,0 | 0,376 | 79 | 0,065 | |
| 1,6 | 1500 | 220 | 9,1 | 1,28 | 78 | 0,065 | |
| 1,1 | 1600 | 220 | 6,3 | 2,95 | 75 | 0,065 | |
| Ми-51 | 5,5 | 2500 | 220 | 27,2 | 0,164 | 82 | 0,125 |
| 3,2 | 1500 | 220 | 17,1 | 0,46 | 82 | 0,125 | |
| 1,6 | 1000 | 220 | 8,7 | 1,1 | 79 | 0,125 | |
| МИ-52 | 7,0 | 2500 | 220 | 37,0 | 0,088 | 84 | 0,15 |
| 4,5 | 1500 | 220 | 23,3 | 0,26 | 85 | 0,15 | |
| 2,5 | 1000 | 220 | 13,1 | 0,569 | 82 | 0,15 |
Приложение 2
Технические данные двигателей серии МИ
| Тип двига- теля | Мощ- ность | Ско- рость вращ. | Напря- жение | Ток якоря | Сопрот цепи якоря | КПД | Момент инерц. |
| Рн, кВт | nн, об/мин | Uн, В | Iн, А | Rд, Ом | hд, % | Jд, кгм2 | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| МИ-11 | 0,12 | 3000 | 60 | 2,87 | 0,46 | 62 | 0,0015 |
| 0,1 | 2000 | 60 | 2,27 | 0,94 | 63 | 0,0015 | |
| 0,12 | 3000 | 100 | 1,53 | 1,48 | 62 | 0,0015 | |
| 0,1 | 2000 | 110 | 1,22 | 3,60 | 63 | 0,0015 | |
| МИ-12 | 0,2 | 3000 | 60 | 4,57 | 0,23 | 66 | 0,002 |
| 0,12 | 2000 | 60 | 2,72 | 0,52 | 64 | 0,002 | |
| 0,2 | 3000 | 110 | 2,46 | 0,765 | 66 | 0,002 | |
| 0,12 | 2000 | 110 | 1,46 | 1,74 | 64 | 0,002 | |
| МИ-21 | 0,25 | 3000 | 60 | 5,6 | 0,284 | 67 | 0,0035 |
| 0,2 | 2000 | 60 | 4,3 | 0,645 | 68 | 0,0035 | |
| 0,25 | 3000 | 110 | 3,05 | 0,945 | 67 | 0,0035 | |
| 0,2 | 2000 | 110 | 2,33 | 2,20 | 68 | 0,0035 | |
| МИ-22 | 0,37 | 3000 | 60 | 8,2 | 0,195 | 71 | 0,04 |
| 0,25 | 2000 | 60 | 5,5 | 0,360 | 75 | 0,004 | |
| 0,12 | 1000 | 60 | 2,6 | 1,44 | 64 | 0,004 | |
| 0,37 | 3000 | 110 | 4,4 | 0,546 | 72 | 0,004 | |
| 0,25 | 2000 | 110 | 2,9 | 1,29 | 70 | 0,004 | |
| 0,12 | 1000 | 110 | 1,4 | 4,58 | 64 | 0,004 | |
| МИ-31 | 0,45 | 3000 | 60 | 10,3 | 0,204 | 68 | 0,009 |
| 0,37 | 2000 | 60 | 8,2 | 0,405 | 70 | 0,009 | |
| 0,45 | 3000 | 110 | 5,6 | 0,585 | 68 | 0,009 | |
| 0,2 | 1000 | 60 | 4,4 | 1,32 | 66 | 0,009 | |
| 0,37 | 2000 | 110 | 4,4 | 1,16 | 70 | 0,009 | |
| 0,2 | 1000 | 110 | 2,4 | 3,9 | 66 | 0,009 |
3.4. Составление передаточных функций
элементов следящей системы
Похожие работы
... универсальный вольтметр В7-25. Он имеет диапазон измеряемых от 1 мкВ до 100 В, основную погрешность , , подавление помех на 70 дБ. Цифровые вольтметры переменного тока Как мы уже отмечали ранее, ЦВ встречаются в пределах каждого вида вольтметров, в том числе и предназначенных для измерения напряжений переменного и импульсного токов, видов ВЗ, В4 и В7. Таким образом, входной величиной АЦП в ...

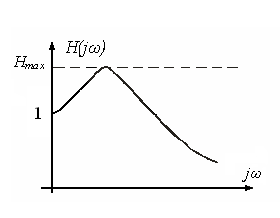


... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
... ТРЕБОВАНИЙ И ПОСТАНОВКА ЗАДАЧ ПРОЕКТИРОВАНИЯ 1.1 Расчеты основных параметров электромеханической системы привода В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить ...
0 комментариев