Общие сведения об изделии РЕМИКОНТ Р 130
Регулирующяя модель
РЕМИКОНТ Р-130
Пульт настройки ПН-1
Блок усилителей сигналов низкого уровня и термопар БУТ-10
Устройство связи с объектом УСО
Функциональные возможности
Общие свойства алгоритмов и алгоблоков
Подготовка и включение РЕМИКОНТ Р 130
Подготовка блока контроллера БК-1 к работе
Тестирование сторожа цикла
Алогоритмы
Настройка
Алгоритмы лицевой панели
ВАА(07)-Ввод аналоговый группы А и
Навигация
ВАА(07)-Ввод аналоговый группы А и
Автоматизированные технологические комплексы
105829
знаков
45
таблиц
0
изображений
3.3 ВАА(07)-Ввод аналоговый группы А и
ВАБ(08)-Ввод аналоговый группы В.
Назначение.
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогово входа (с АЦП). Для связи с аналоговыми входами группы А и Б используются соответственно алгоритмы ВАА и ВАБ. Каждый алгоритм обслуживает до 8 аналоговых входов.
Помимо связи с АЦП алгоритмы ВАА и ВАБ позволяют корректировать диапазон входного аналогово сигнала в двух точках, соответствующих 0 и 100% диапозона.
Описание алгоритма.
Алгоритм содержит несколько идентичных независимых каналов. Число каналов 0<=M<=8 и задается модификатором (рис.7). Каждый канал связан с соответствующим (по номеру) анлоговым входом контроллера.
3.4. ВДА(09)-Ввод дискретный группы А и
ВДБ(10)-Ввод дискретный группы .
Назначение.
Алгоритм применяется для связи функциональнных алгоритмов с аппаратными средствами дискретного ввода (с ДЦП). Для связи с входами группы А и Б используются соответственно алгоритмы ВДА и ВДБ. Каждый алгоритм обслуживает до 16 дискретных входов.
Описание алгоритма.
Алгоритм содержит несколько идентичных независимых каналов. число которых 0<=M<=16 и задается модификаторо (рис.8). Если напряжение на i-м дискретном входе контроллера равно 0,
сигнал на i-м выходе алгоритма ВДА(ВДБ) равен Di=0. Если на i-й дискретный вход контроллера подано напряжение 24В, сигнал на i-м выходе алгоритма ВДА(ВДБ) принимает значение Di=1.
Выход алгоритма ВДА(ВДБ).
Таблица 11.1| Выходы | Назначение | ||
| N | Обозн. | Вид | |
| 01 02 M м | D1 D2 M Dm | Выходы | Выход канала 1 Выход канала 2 Выход канала м |
3.5 АВА(11)-Аналоговый вывод группы А и
АВБ(12)-Аналоговый вывод группы Б.
Назначение.
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогового вывода (с ЦАП). Для связи с аналоговыми выходами группы А и Б используется соответственно алгоритмы АВА и АВБ. Каждый алгоритм обслуживает до 2 аналоговыхвыходов. Помимо связи с ЦАП алгоритмы АВА и АВБ позволяют корректировать
диаппазон выходного аналогового сигнала в двух точках,соответствующих 0 и 100% диапазона.
Описание алгоритма.
Алгоритм содержит до 2 идентичных независимых каналов. Число этих каналов 0<=M=<2 задается модификатором (рис.9). Каждый канал связан с соответствующим (по номеру) аналоговым
выходом контроллера. Эта связь образуется "автоматически",как только алгоритм АВА(АВБ) вводится в один из алгоблока контроллера.
3.6. ДВА(13)-Дискретный вывод группы А и
ДВВ(14)-Дискретный вывод группы Б
Назначение.
Алгоритм прменяется для связи функциональных алгоритмов с аппаратными средствами дискретного вывода (с ЦДП). Для связи с выходами А и Б используется соответственно алгоритмы ДАА(ДВБ). Каждый алгоритм обслуживает до 16 дискретных выходов. Описание алгоритма.
Алгоритм содержит несколько идентичных независимых каналов, число которых 0<=M=<16 и задается модификатором (рис.10). Если на i-й вход алгоритма поступает сигнал Di=0, контакты
i-го дискретного выхода разомкнуты. Если Di=1, контакты i-го дискретного выхода замыкаются.
Входы алгоритма ДВА(ДВБ)
Таблица 13.
| Выходы | Назначение | ||
| N | Обозн. | Вид | |
| 01 02 M м | C1 C2 M Cm | Выходы
| Выход канала 1 Выход канала 2 Выход канала м |
3.7. ИВА(15)-Импульсный вывод группы А и
ИВБ(16)-Импульсный вывод группы Б.
Назначение.
Алгоритм применяется в тех случаях, когда контроллер должен управлять исполнительным механизмом постоянной скорости. Алгоритм преобразует сигнал, сформированный алгоблоками контроллера ( в частности, алгоритмом импульсного регулирования),в последовательности
импульсов переменной скважности. Алгоритм выдает последовательнось указанных импульсов на средства дискретного выхода контроллера. Для связи с выходами группы А и Б используются алгоритмы соответственно ИВА и ИВБ.
Описание алгоритма.
Алгоритм содержит несколько (до 4) каналов связи с выходами контроллера. Число этих каналов 0<=M=<4 задается модификатором (рис.11). Если импульсный выход используется как в группе А, так и в группе Б, то общее число импульсных выходов (т.е. сумма модификаторов алгоритмов ИВА и ИВБ) не может быть больше 4. Каждый канал алгоритма ИВА(ИВБ) содержит широтно-импульсивный модулятор (ШИМ),преобразующий входной сигнал Х в последовательность
импульсов со скважностью Q, пропорциональной входному сигналу : Q=/Х/ / 100. При /Х/ >=100% скважность Q=1. Если Х=0, импульсы формируются в выходной цепи "больше",если Х=0, то в цепи "меньше".
При Х=0 выходной сигнал -- равен 0.
Параметр Т задает минимальную длительность выходных импульсов. Этот параметр устанавливается в диапазоне 0,12<=T=<3,84 S. Параметр N определяется к какому контуру регулирования относится данный канал алгоритма ИВА(ИВБ). Задание этого параметра необходимо
лишь в том случае, когда требуется, чтобы синхронно с формированием выходных импульсов на лицевой панели контроллера зажигались ламповые индикаторы " "," "("больше","меньше"). Напрмер, если установлен параметр N1=1, то при работе ШИМ1 на лицевой панели будут зажигаться индикаторы при вызове 1-го контура. Если задано N<1, то индикаторы
зажигаться не будут, какой бы контур ни был вызван на лицевую панель. Если для нескольких ШИМ задан одинаковый номер N, то действует следующая система приоритетов: ШИМ группы Б приоритетны над ШИМ группы А; в пределах одной группы приоритетны ШИМ со старшими номерами.
Входы алгоритма ИВА (ИВБ).
Таблица 14.
| Выходы | Назначение | ||
| N | Обозн | Вид | |
| 01 02 03 04 05 06 07 08 09 10 11 12 | X1 T1 N1 X2 T2 N2 X3 T3 N3 X4 T4 N4 | Выходы | Сигнал 1-го выхода Длительность импульса 1-го выхода Номер, контура, с которым связан 1-ый выход То же, что Х1, но для 2-го выхода То же, что Т1, но для 2-го выхода То же, что N1, но для 2-го выхода То же, что Х1, но для 3-го выхода То же, что Т1, но для 3-го выхода То же, что N1, но для 3-го выхода То же, что Х1, но для 4-го выхода То же, что Т1, но для 4-го выхода То же, что N1, но для 4-го выхода |
3.8. АВР(17)-Аварийный вывод.
Назначение.
Алгоритм позволяет алгоритмическими средствами сформировать два независимых сигнала на аварийных выходах контроллера: на выходе "отказ" и на выходе "отключение интерфейса". Алгоритм применяется в тех случаях, когда какая-либо ситуация ( т.е появление каких-либо сигналов,поступивших из вне или сформированных внутриконтроллера) должна рассматриваться либо как аварийная, либо как сигнал о том, что следует заблокировать связь контроллера
с абонентами по интерфейсному каналу. Алгоритм позволяет также выявить наличие короткого замыкания на дискретных или импульсных выходах контроллера.
Описание алгоритма.
Если на вход отказа приходит сигнал Сотк.=1, на аварийном выходе контроллера формируется сигнал отказа, сформированный алгоритмом, по схеме ИЛИ оъединяется с сигналом отказа, сформированным средствами самодиагностики контроллера. При наличии сигнала отказа
с помощью аппаратных средств формируется также сигнал "отключение интерфейса", т.е. при отказе связь контроллера по интерфейсному сигналу блокируется(рис.12).
Если на вход отключения интерфейса приходит сигнал Синт.=1,
на аварийном выходе контроллера формируется сигнал отключения интерфейса. Этот сигнал, сформированный алгоритмом, по схеме ИЛИ объединяется с сигналом отключения интерфейса, сформированным средствами самодиагностики контроллера. Алгоритм имеет два дискретных выхода,свидетельствуючих о том, имеется ли короткое замыкание на дискретных или импульсных выходах контроллера. Если хотя бы на одном дискретном или импульсном выходе
в группе А возникло короткое замыкание, сигнал Dкз,а=1, в противном случае Dкз,а=0. Аналогично выход Dкз,б сигнализирует окоротком замыкании в группе Б.
Входы-выходы алгоритма АВР.
| Входы-выходы | Назначение | ||
| N | Обозн. | Вид | |
| 0102 | Сотк. Синт. | Входы | Команда "отказ" Команда "отключение интерфейса" |
| 01 02 | Dк3,а Dк3,б | Выходы | Признак короткого замыкания на дискретных (импульсных) выходах группы А. То же для группы Б. |
ТРИ-RS-Триггер
Алгоритм содержит несколько (до 20) независимых R,S-триггеров и применяется для запоминания дискретных сигналов. Алгоритм содержит 0£м£20 независимых ячеек, каждая из которых представляет собой RS – триггер. Число м определяется модификатором. При м=0 алгоритм является “пустым”. Работа каждой ячейки алгоритма определяется таблицей 1, а входы-выходы алгоритма показаны в таблице 2.
| Сs | CR | D |
| 0 1 0 1 | 0 0 1 1 | Di-1 1 0 0 |
Таблица 1.
(Di-1 – предыдущее значение выхода).
| Входы – Выходы | Назначение | ||
| № | Обозн | Вид | |
| 01 02 M 2м-1 2м | Cs,1 CR,1 M Cs,m CR,m | Входы | Вход установки 1-й я-ч. Вход сброса 1-й ячейки. M Вх. Ус-ки м-ой яч. Вх. Сброса м-ой яч. |
| 01 M м | D1 M Dm | Входы | Выход 1-й ячейки M Выход m-ой ячейки |
Таблица 2.
Каждые ячейки имеют два дискретных входа и один дискретный выход.
Функциональная схема алгоритма “Триггер ТРИ”
TMP – Таймер
Алгоритм используется для задания выдержек времени. Алгоритм содержит несколько (до 20) таймеров, объединённых общими командами “стоп” и “сброс”. В каждом таймере индивидуально настраивается время сбрасывания таймера. Алгоритм содержит одно звено таймера и м нуль – органов, где 0£м£20 и задаётся модификатором.
| Входы – Выходы | Назначение | ||
| № | Обозн. | Вид | |
| 01 02 03 M м+2 | Сст Ссбр Т1 M Тм | Входы | Команда “стоп” К-да “сброс” Время срабатывания 1-го нуля органа Время срабатывания м-го нуля органа |
| 01 02 M м+1 | Т D1 M Dm | Выходы | Текущее время Выход 1-го нуль-органа Выход м-го нуль-органа |
Функциональная схема алгоритма “Таймер ТМР”
СЧТ – Счётчик
Алгоритм представляет собой реверсивный счётчик и используется для подсчёта числа дискретных событий, а также для сравнения подсчитанного числа с заданными числами с помощью числовых
нуль-органов. Один алгоритм может содержать до 20 таких нуль-органов. Работа счётчика разрешается, если на входах Сст и Ссбр отсутствуют сигналы “стоп” и “сброс”.
Входы – выходы алгоритма СЧТ.
| Входы – Выходы | Назначение | ||
| № | Обозн. | Вид | |
| 01 02 03 04 05 06 | Сб Сн СстСсбр N0 N1 M | Входы | К-да на увеличение числа Команда на уменьшение числа К-да “стоп” К-да “сброс” Наминальное значение числа Пороговое значение 1-го нуль органа |
| 01 02 | N D1 | Выходы | Число, подсчитанное счётчиком Выход 1-го нуль органа |
Функциональная схема алгоритма “Счётчик СЧТ”
ОДВ - одновибратор
Алгоритм применяется в тех случах, когда необходимо эформировать одиночный импульс заданной длительности. Одновибратор запускается по переднему фронту сначала на входе Сп (пуск), т.е. когда на входе Сп дискретный сигнал переходит из состояния лог.0 в состояние лог.1. Перед пуском выходной дискретный сигнал Dотсутствует. После пуска на выходе D появится сигнал, причём этот сигнал нах. в состоянии лог.1 в течении времени t=Т, где параметр настройки. По истечении времени Т сигнал на выходе внвь переходит в нулевое состояние после чего одновибратор можно вновь пустить.
Входы – выходы алгоритма ОДВ.
| Входы – Выходы | Назначение | ||
| № | Обозначение | Вид | |
| 01 02 03 | Сп Ссбр Т | Входы | Команда “пуск” Команда “сброс” Длительность импульса |
| 01 02 | Д Ти | Выходы | Основной импульс Текущее время импульса |
Функциональная схема алгоритма «одновибратор ОДВ»
МУВ – мультивибратор
Алгоритм применяется для периодического включения оборудования (двигателя, обеспечения мигающей сигнализации и т.п.). Мультивибратор запускается попереднему фронту сигнала на входе Сп (пуск), т.е. при изменении Сп из состояния лог.0 на состояние лог.1 после пуска на основном выходе алгоритма формируется последовательность импульсов. Длительность этих импульсов задаётся настроечным входом Т1, длительность паузы – входом Т0. Состояние основного выхода Д алгоритма в режиме пуска при различных значениях Т1 иТ0 опр – ся таблицей:
| Вхроды – выходы | Назначение | ||
| № | Обозн. | Вид | |
| 01 02 03 04 | Сп Ссбр Т1 Т0 | Входы | К – да “пуск” К – да”сброс” Длительность импульса Длительность паузы |
| 01 02 | Д Ти | Выходы | Основной выход Время текущего импульса |
Функциональная схема алгоритма “мультивибратор МУВ”
ЛОК – логический контроль. Алгоритм применяется для контроля за состоянием нескольких(до 99) дискретных сигналов. Как правило алгоритм оперативного контроля ОКЛ иОКО. На вход алгоритма подаются m дискретных сигналов, причём 0£m£99 зодаётся модификатором. При m = 0 алгоритм является “пустым”. Если все входные сигналы равны лог. – му 0, вых – ые сигналы N = Д = 0.
Входы - выходы алгоритма ЛОК.
| Входы – выходы | Назначение | ||
| № | Обозн. | Вид | |
| 01 | С | Входы | Сигнал на 1 – м входе |
| 01 02 | N Д | Выходы | Номер вх – го сигнала (не = 0) Признак отличия от нуля |
УТП – Управление трёхпозиционной нагрузкой
Алгоритм применяется для логического управления трёхпозиционным исполнительным устройством (клапаном с маторным управлением) в тех случаях, когда на исполнительное устройство приходят коды из нескольких (до 16) точек (шагов) лог-й. программы. Алгоритм имеет 3 группы входных сигналов: группа Сотк, j (к.-ды на открытие), группа Сзкр.(к.-да на закрытие) и группа Сост, j (к.-ды на останов.) Каждая группа имеет одинаковое число сигналов 0£м£16. Число м задаётся модификатором.
Входы – выходы алгоритма УТП.
| Входы – выходы | Назначение | ||
| № | Обозн. | Вид. | |
| 01 м+1 2м+1 | Сотк,1 Сзкр,1 Сост,1 | Входы | 1-я команда на открытие 1-я команда на закрытие 1-я команда на остановку |
| 01 02 03 04 05 | Дотк Дзкр Дот Дзк Дос | Выходы | Выходная команда на открытие Выходная команда на закрытие Признак команды в группе открытия Признак команды в группе закрытия Признак команды в группе останов.а |
Функциональная схема управления “УТП”
Алгоритм применяется для логического управления двухпозиционным исполнительным устройством в тех случаях, когда на одно исполнительное устройство(клапан, нагреватель и т.п.) приходят команды из нескольких точек (шагов) логической программы.
Алгоритм имеет 2 группы входных сигналов: Свкл, j (команды включения) и Свык, j (команды выключения). В каждой группе число сигналов одинаково и равно 0 £м£16. Число м задаётся модификатором.
Входы – выходы алгоритма УДП.
| Входы – выходы | Назначение | ||
| № | Обозначение | Вид | |
| 01 м+1 | Свкл,1 Свык,1 | Входы | 1-я команда на включение 1-я команда на выключение |
| 01 02 03 | Д Двкл Двык | Выходы | Основной выход К-да в группе включения К-да в группе выключения |
Функциональная схема алгоритма “УДП”.
Алгоритм применяется для логического объединения по ИЛИ нескольких (до 99) дискретных сигналов. Алгоритм имеет м входов Сj и один выход, причём Д £м£99 и задаётся модификатором. При м=0 алгоритм является “пустым”. Выходной сигнал: Д=С1VC2V…VCm. В табличной форме работа алгоритма записывается в виде:
| С1 | С2 | С3 | ….. | См | Д |
| 0 | 0 | 0 | ….. | 0 | 0 |
| 1 | * | * | ….. | * | 1 |
| * | 1 | * | ….. | * | 1 |
| * | * | 1 | ….. | * | 1 |
| M | M | M | ….. | M | M |
| * | * | * | ….. | 1 | 1 |
*-значение сигнала безразлично.
Входы – выходы алгоритма МИЛ.
| Входы – выходы | Назначение | ||
| № | Обозначение | Вид | |
| 01 02 M м | С1 С2 M См | Входы | 1-й вход 2-й вход M м-й вход |
| 01 | Д | Выход | Выход |
Функциональная схема алгоритма “МИЛ”.
ЭТП-Этап.
Алгоритм применяется для организации логической шаговой программы, т.е. программы, которая должна выполнить определённую последовательность действий. Алгоритм ЭТП применяется в сочетании с алгоритмом ОКЛ.
Один этап состоит из 0£м£шагов, причём задаётся модификатором алгоритма ЭТП. Шаг имеет 3 входа и 1 вых. Вход С- условие выполнения шага, вход Т-контрольное время шага, вход N-параметр, определяющий последующий ход выполнения программы, Д-вход шага.
Выходы алгоритма ЭТП.
| № | Обозначение | Назначение |
| 01 02 03 04 05 06 M м+4 | Nш Tш N Дш Д1 Д2M Дм | Номер выполняемого шага Время оставшееся до истечения контрольного времени выполняемого шага. Параметр, равный параметру Ni выполн – го шага. Признак того, что выполняемый шаг закончен. Выход 1 – го шага Выход 2 – го шага M Выход шага m. |
Логическое “И” ЛОИ (70).
Назначение: Алгоритм используется для формирования нескольких (до 20) дискретных сигналов, каждый из которых является логическим объединением по “И” двух дискретных сигналов.
Входы – выходы алгоритмов ЛОИ.
| Входы – выходы | Назначение | ||
| № | Обозн. | Вид | |
| 01 02 03 04 M 2m-1 2m | С С С С M С1,m C2,m | Входы | 1 – й вход 1 – го звена 2 – й вход 1 – го звена 1 – й вход 2 – го звена 2 – й вход 2 – го звена 1 – вход m – го звена 2 – й вход m – го звена |
| 01 02 M m | D1 D2 M Dm | Выходы | Выход 1 – го звена Выход 2 – го звена Выход m – го звена |
Функциональная схема алгоритма ЛОИ.
Сумирование с масштабированием СМА (43)
Назначение: Алгоритм используется для получения взвешенной суммы нескольких (до 21) сигналов. В частности, он применяется вместе с алгоритмами регулирование для построения
Регуметоров соотношение либо для введения статической корекции.
Входы – выходы алгоритма СМА.
| Входы – выходы | Назначение | ||
| № | Обозн. | Вид | |
| 01 02 03 M 04 05 M 2m 2m+1 | X0 X1 Kм,1 X2 Kм,2 Xм Kм,m | Вход | Немасштабируемый вход (коскадный) 1 – й масштабируемый вход. Масштабируемый коэф. по 1 – му масштабируемому входу. 2 – й масштабируемый вход. Масштабируемый коэф. по 2 – му масштабируемому входу. m – ый масштабируемый вход. Масштабный коэф. по m – му входу |
| 01 | Y | Выход | Вход (каскадный) |
Функциональная схема алгоритма СМА.
Умножение – деление УМД(44)
Назначение: Алгоритм предназначен для выполнения математических операций умножение и (или) деление.
Входы – выходы алгоритма УМД| Входы – выходы | Название | ||
| № | Обозн | Вид | |
| 01 02 03 | Х1 Х2 Х3 | Входы | Первый сомножитель Второй сомножитель Дельтель |
| У | Выход | Выход (каскадный) | |
Функциональная схема алгоритма УМД.
Многовходовое “И” МНИ(71).
Назначение: Алгоритм используется для логического объединения по ”И” нескольких (до 99) дискретных сигналов.
Входы – выходы алгоритма МНИ.
| Входы – выходы | Назначение | |||
| № | Обозначение | Вид | ||
| 01 02 M м | С1 С2 M См | Входы | 1-й вход 2-й вход M м-й вход | |
| 01 | Д | Выход | Выход | |
Функциональная схема алгоритма “И”
Логическое “ИЛИ” (72)
Назначение:Алгоритм используеться для формирования нескольких (до 20) дискретных сигналов, каждый из которых явл. Логическим объед. По “ИЛИ” двух дискретных сигналов.
Входы – выходы алгоритма “ИЛИ”
| № | Обозначение | Вид | Назначение |
| 01 02 03 04 M 2м-1 2м | С1,1 С2,1 С1,2 С2,2 M С1,м С2,м | Входы | 1-й вход 1-го звена 2-й вход 2-го звена 1-й вход 2-го звена 2-й вход 2-го звена M 1-й вход м-го звена 2-й вход м-го звена |
| 01 02 M м | Д1 Д2 Дм | Выходы | Выход 1-го звена Выход 2-го звена M Выход м-го звена |
Функциональная схема алгоритма “ИЛИ”
Масштабирование МСШ(55).
Назначение: Алгоритм применяеться для масштабирования нескольких (до 20) аналоговых сигналов.
Входы – выходы алгоритма МСШ| Входы – Выходы | Назначение | ||
| № | Обозначение | Вид | |
| 01 02 03 04 M 2м-1 2м | Х1 Км,1 Х2 Км,2 ---- Хм Км,м | Входы | 1-й масштабируемый вход. 1-й масштабируемый коэф. 2-й масштабируемый вход. 2-й масштабируемый коэф. ---- m-й масштабируемый вход m-масштабный коэф. |
| 01 02 M м | У1 У2 ---- Ум | Выходы | 1-й выход 2-й выход ---- м-й выход. |
Дискретный контроль ДИК(04)
Назначение: Алгоритм применяеться в сочетании с алгоритмом ОКЛ и используеться для выдачи дискретной информации на лицевую панель контролера. (Только в варианте логического управления).
Входы алгоритма ДИК| Входы | Назначение | ||
| № | Обозначение | Вид | |
| 01 02 M м | С С С | Входы | 1-й ламповый индикатор 2-й ламповый индикотор m-й ламповый индикатор |
Пороговый контроль ПОК (29)
Назначение: Алгоритм контролирует несколько (до 20) аналоговых сигналов, сравнивая каждый из них с двумя индивидуальными для каждого сигнала допустимыми значениями.
Входы-выходы алгоритма ПОК| Входы-Выходы | Назначение | ||
| № | Обозначение | Вид | |
| 01 04 M 3м-2 02 03 05 06 M 3м-1 3м | Х1 Х2 M Хм ХВ,1 Хн,1 Хв,2 Хн,2 M Хв,м Хн,м | Входы | 1-й контролируемый сигнал 2-й контролируемый сигнал m-й контролируемый сигнал Верхняя установка 1-го канала Нижняя установка 1-го канала Верхняя установка 2-го канала Нижняя установка 2-го канала Верхняя установка m-го канала Нижняя установка m-го канала. |
| 01 02 | N D | Выходы | Номер Вх сигнала, достигшего установки. Признак того, что один из Вх сигналов. |
Пороговый элемент ПОР (59)
Назначение: Алгоритм применяеться для контроля за выходом сигнала или разности 2-х сигналов из ограниченной справа области допустимых значений.
Входы – выходы алгоритма ПОР.
| Входы-выходы | Назначение | ||
| № | Обозначение | Вид | |
| 01 02 03 04 M 4m-3 4m-2 4m-1 4m | Х1,1 Х2,1 Хср,1 Х▲,1 M Х1,m Х2,m Хср,m Х▲,m | Входы | Первый вход первой ячейки Второй вход первой ячейки Порог срабатывания первой ячейки Гистерезис первой ячейки Первый вход m-ой ячейки Второй вход m-й ячейки Порог срабатывания m-й ячейки Гистерезис m-ой ячейки |
| 01 02 M m m+1 | Д1 Д2 M Дm Д0 | Выходы | Выход первой ячейки Выход второй ячейки Выход m-ой ячейки Груповой выход |
Функциональная схема алгоритма ПОР
Похожие работы

... требований техники безопасности; Выбор вспомогательных устройств осуществляется в зависимости от типа, формы, массы, материала и размеров деталей, технологических схем оборудования и серийности производства. Для обработки деталей типа тел вращения применяются токарно-винторезные станки. При автоматизации производства необходимо применение станков с ЧПУ, поэтому для обеспечения данного условия ...
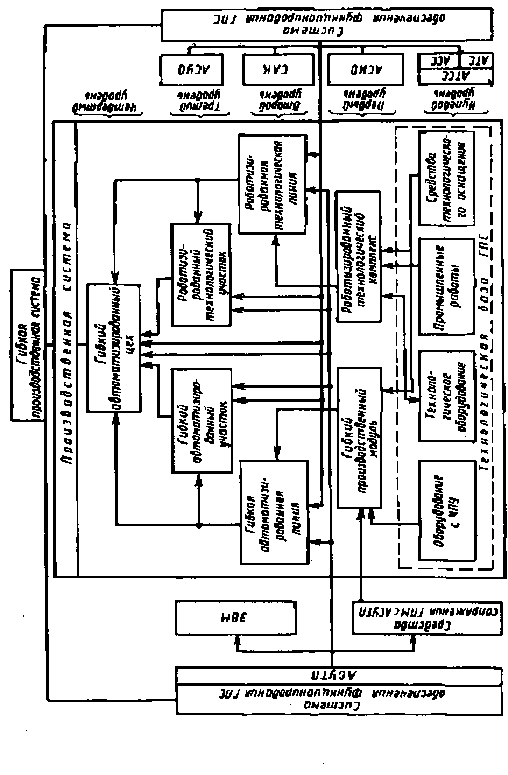
... место, которое занимают в ней роботизированные технологические комплексы. ГПС (по ГОСТ 26228-85) представляет собой совокупность в различных сочетаниях технологического оборудования с ЧПУ, роботизированных технологических комплексов (РТК), гибких производственных модулей (ГПМ), ПР и других механизмов, разрабатываемых и функционирующих в автоматическом режиме в течении заданного интервала времени ...





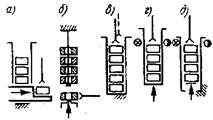
... -4002; 5) пинцет ППМ 120 РД 107.290.600.034-89; 6) тара АЮР 7877-4048. Суммарное оперативное время Топ = 2 мин. Комплект технологической документации на технологический процесс сборки и монтажа блока стробоскопического прибора приведен в приложении. 5. ПРОЕКТИРОВАНИЕ УЧАСТКА СБОРКИ И МОНТАЖА Внедрение на предприятии механизированных, автоматизированных и автоматических поточных линий ...
... приспособления и различные специальные устройства для операций крепежа, пайки, склейки и др. Наконец, к вспомогательному оборудованию относятся и различные средства техники безопасности на роботизированных технологических комплексах. Чаще всего применяется сеточное ограждение. Применяются также системы защиты с фотоэлементами. Механизм автоматической смены захватного устройства ПР. В полностью ...
0 комментариев