Навигация
Упрощённая конструкция манипулятора со связанными системами координат
7871
знак
0
таблиц
31
изображение
4. Упрощённая конструкция манипулятора со связанными системами координат
 |
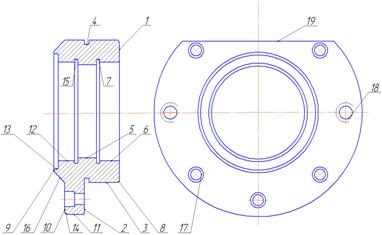
Рис.5 Упрощённая конструкция манипулятора со связанными системами координат
Связанные системы координаты расставлены в соответствии с представлениями Денавита – Хартенберга.
Система [X0,Y0,Z0] – связанная система координат 1-го звена
[X1,Y1,Z1] – связанная система координат 2-го звена
[X2,Y2,Z2] – связанная система координат 3-го звена
[XР,YР,ZР] – связанная система координат рабочего органа

5. Результирующие однородные матрицы преобразований для каждой точки позиционирования
Результирующие однородные матрицы преобразования определяются с помощью уравнения кинематики манипулятора:
![]()
 Определение однородной матрицы преобразования для первой точки позиционирования рабочего органа:
Определение однородной матрицы преобразования для первой точки позиционирования рабочего органа:
![]()
![]()
![]()

![]()
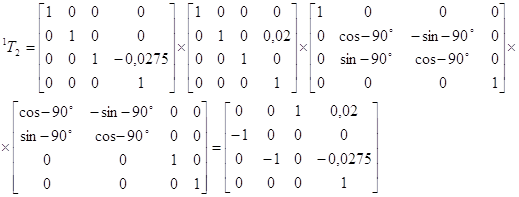


Однородная матрица преобразований для первой точки равна:


Определение однородной матрицы преобразования для второй точки позиционирования рабочего органа:

![]()
![]()
![]()
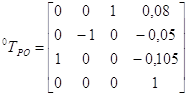
Произведя необходимые подсчёты, как в предыдущем случае получим однородную матрицу преобразований для второй точки:
Определение однородной матрицы преобразования для третьей точки позиционирования рабочего органа:

![]()
![]()
![]()

Произведя необходимые подсчёты, как в предыдущем случае получим однородную матрицу преобразований для третьей точки:

 Определение однородной матрицы преобразования для четвёртой точки позиционирования рабочего органа:
Определение однородной матрицы преобразования для четвёртой точки позиционирования рабочего органа:
![]()
![]()
![]()
Произведя необходимые подсчёты, как в предыдущем случае получим однородную матрицу преобразований для четвёртой точки:


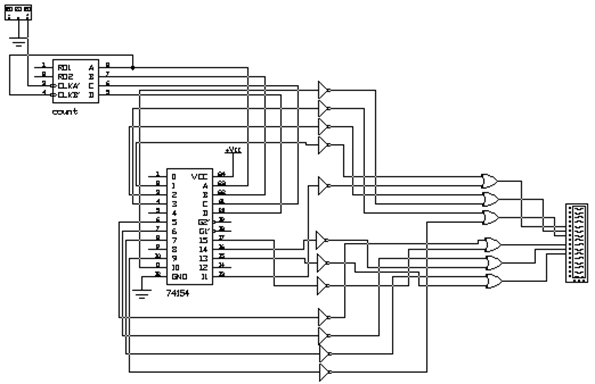
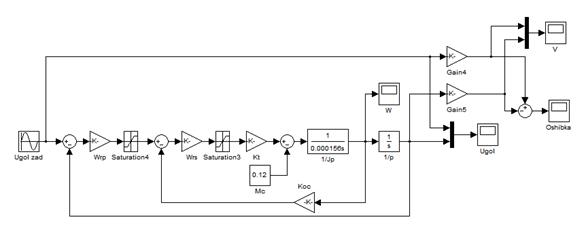
6. Принципиальная электрическая схема устройства управления


7. Сборочный чертёж манипулятора в прямоугольной правосторонней системе координат
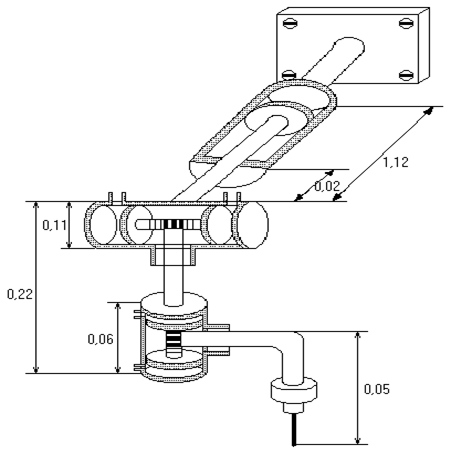
Рис. 7 Сборочный чертёж манипулятора в прямоугольной правосторонней системе координат

Заключение
В данной работе был спроектирован манипулятор, который производит технологическую операцию точечной сварки. Данный манипулятор может производить сварку в четырёх точках позиционирования, но при необходимости их количество можно увеличить до восьми.
Также в работе используется позиционная система управления и представлена схема электрическая принципиальная устройства управления, а также сборочный чертёж манипулятора.
Как показывает проект робот может справляться с некоторыми задачами выполняемыми людьми, а особенно незаменимой помощь подобного робота становится в сложных условиях, в которых человеку невозможно работать.

Литература
1. Конспект “Робототехника” Мардаре И.А., 2001,ТУМ
2. “Роботы и автоматизация производства”, Асфаль Р., М.:Машиностроение, 1989г.

Введение
Слово «робот» было введено в обращение чешским писателем Карелом Чапеком и первоначально означало: «машина с антропоморфным (человекоподобным) поведением, которое частично или полностью выполняет функции человека при взаимодействии с окружающим миром». Писателя-фантаста, химика по образованию, Айзека Азимова, многие называют теоретиком робототехники. Сам он пишет об этом следующее: «Я дожил до дня, когда мои законы воспринимают всерьез и цитируют в научных статьях ученые-робототехники». Первые роботы, имитировавшие внешний облик и движения человека, использовались в развлекательных целях. По мере развития техники роботы потеряли внешнее сходство с человеком и превратились в различные устройства и механизмы, которые освобождают людей от тяжелой и однообразной работы, от работы, опасной для здоровья (в условиях повышенной радиации, высокой или низкой температуры, в труднодоступных местах). В настоящее время робототехника представляет человеку огромный спектр вспомогательных устройств, начиная от роботов-сварщиков и заканчивая подводными телеуправляемыми системами. Лучшие умы планеты бьются над основной задачей, лежащей на стыке таких отраслей знаний, как искусственный интеллект, техническая кибернетика, психология, системный анализ, а именно — задачей наделить робототехническую систему разумом.
Промышленные роботы
Эта группа роботов также практически полностью лишена разума. Предназначены они лишь для того, чтобы заменить человека на всех трудных, монотонных, поточных работах. Эти роботы действуют на основании жестко описанных программ и иногда наполняют собой

автоматические линии, участки, а также способны выполнять полный производственный цикл. Ученые выделяют в этой группе три поколения роботов, но их назначение не меняется, они были и остаются неутомимыми рабочими, делающими свою работу 24 часа в сутки, не требуя зарплаты, доплаты за сверхурочные, премии и отпусков.
В предстоящей работе ставится задача по проектированию именно промышленного робота индекс подвижности манипулятора которого следующий ПХ-ВZ-BY. Необходимо, чтобы этот робот совершал точечную сварку в четырёх точках позиционирования.
По окончании работы должна быть представленна принципиальная электрическая схема устройства управления.
Похожие работы
... необходимо рассмотреть сам манипулятор, и привести необходимые параметры к валу двигателя. Манипуляторы – технические устройства для воспроизведения некоторых двигательных функций рук человека. Для механизма выдвижения руки манипулятора выбираем шарико-винтовую передачу. Даная передача обеспечивает достаточно высокий коэффициент полезного действия(до 0,9), имеет большой ресурс и малые габариты. ...
... , , . Произведем оценку числа возможных вариантов, которые можно синтезировать на основе морфологической матрицы при наложении на нее граничных условий проектирования, а именно исключения вышеперечисленных вариантов: Для всего PC машины поточной линии прядильного производства оценка полных решений может быть проведена по следующей формуле: , где – количество исполнительных механизмов в ...
... из них. 5 АНАЛИЗ БАЗОВОГО ОПЕРАЦИОННОГО ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПО КРИТЕРИЮ ОБЕСПЕЧЕНИЯ ЗАДАННОЙ СМЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ ОБРАБОТКИ Определение ожидаемой сменной производительности системы технологического оборудования в условиях неавтоматизированного производства можно найти по формуле: деталей/смену, где - время выполнения холостых (вспомогательных) операций в условиях ...
... к точности, хотя это уменьшение весьма не значительное. 4.Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в работе, использовалась программа “Модель портального манипулятора МРЛ-901П в момент ...
0 комментариев