Навигация
Проектирование манипулятора
7871
знак
0
таблиц
31
изображение
Министерство Образования Республики Молдова
Технический Университет
Молдовы
Кафедра КПЭА
Курсовая работапо дисциплине : Робототехника
тема : Проектирование манипулятора
Выполнилcт. гр. EI – 972 Сороков А.С.
Проверил
доцент Мардаре И.А.
Кишинёв 2001
Введение 4
1. Кинематическая схема манипулятора 6
2. Описание последовательности движений звеньев
манипулятора 7
3. Форма, размеры и расположение рабочей зоны 8
4. Упрощённая конструкция манипулятора со
связанными системами координат 11
5. Результирующие однородные матрицы преобразований
для каждой точки позиционирования 12
6. Принципиальная электрическая схема устройства управления 16
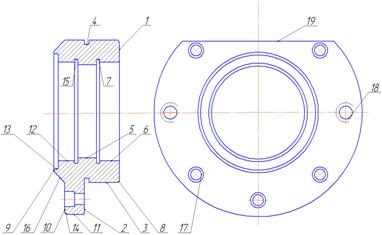
7. Сборочный чертёж манипулятора в прямоугольной
правосторонней системе координат 17
Заключение 18
Литература 19
CPAE EI 2102 972 17 ПЗ
Манипулятор
UTM FRE
EI - 972

1. Кинематическая схема манипулятора
На рисунке 1 представлена кинематическая схема манипулятора выполненная в правосторонней прямоугольной системе координат.
Индекс подвижности манипулятора : Пх – Вz - By


2. Описание последовательности движений звеньев манипулятора
1. В исходном состоянии рабочий орган манипулятора находится в первой точке позиционирования, в начале системы координат. Ни одно из звеньев не совершало движения.
2. Звено один совершает перемещение, в результате чего рабочий орган перемещается из точки один в точку два.
3. Второе звено совершает перемещение, в результате чего рабочий орган поворачивается на 180° и подходит к точке три.
4. Звено один совершает перемещение, при этом рабочий орган перемещается в точку четыре.
5. Второе звено совершает перемещение, в следствии чего, рабочий орган поворачивается на 180° и возвращается в точку один.

3. Форма, размеры и расположение рабочей зоны
Для определения параметров рабочей зоны необходимо рассчитать геометрические размеры манипулятора.
Следовательно, необходимо определить размеры цилиндра поступательного перемещения, а также размеры цилиндра вращательного перемещения.
 |
Сначала определим размеры цилиндра поступательного перемещения: Рис.2 Цилиндр поступательной подвижности
Определим длину цилиндра L по формуле:
![]() , где
, где
Н – заданное поступательное перемещение
1,1 – взято из конструктивных соображений
![]()
Определим диаметр цилиндра D по формуле:
![]()
![]()

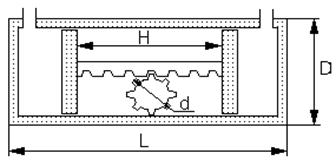 |
Определим размеры цилиндра вращательных подвижностей: Рис.3 Цилиндр вращательной подвижности
Определим длину цилиндра L по формуле:
![]() , где
, где
Н – величина поступательного перемещения для поворота на необходимый угол, которая определяется по формуле Н = pd для поворота на угол 360°
d – диаметр вала вращения (4см)
0,05 – запас на поршни и другие конструктивные элементы
Так как имеется две вращательные подвижности, то была рассчитана длина каждой подвижности, которые равны:
![]()
![]()
Определим диаметр цилиндра D по формуле:
![]() , где
, где
2,5 – коэффициент, учитывающий диаметр вала вращения и тодлщину рейки
1,1 – из конструктивных соображений
Результаты определения диаметра:
![]()
![]()

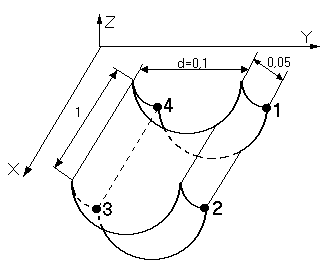
На рисунке 4 представлена рабочая зона рабочего органа. Из данного рисунка видно, что четыре точки позиционирования рабочего органа отмечены цифрами 1,2,3,4.

Похожие работы
... необходимо рассмотреть сам манипулятор, и привести необходимые параметры к валу двигателя. Манипуляторы – технические устройства для воспроизведения некоторых двигательных функций рук человека. Для механизма выдвижения руки манипулятора выбираем шарико-винтовую передачу. Даная передача обеспечивает достаточно высокий коэффициент полезного действия(до 0,9), имеет большой ресурс и малые габариты. ...
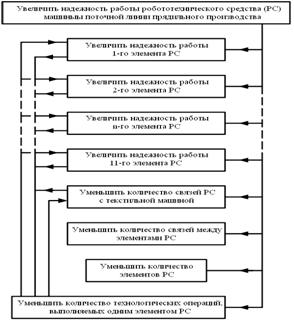
... , , . Произведем оценку числа возможных вариантов, которые можно синтезировать на основе морфологической матрицы при наложении на нее граничных условий проектирования, а именно исключения вышеперечисленных вариантов: Для всего PC машины поточной линии прядильного производства оценка полных решений может быть проведена по следующей формуле: , где – количество исполнительных механизмов в ...
... из них. 5 АНАЛИЗ БАЗОВОГО ОПЕРАЦИОННОГО ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПО КРИТЕРИЮ ОБЕСПЕЧЕНИЯ ЗАДАННОЙ СМЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ ОБРАБОТКИ Определение ожидаемой сменной производительности системы технологического оборудования в условиях неавтоматизированного производства можно найти по формуле: деталей/смену, где - время выполнения холостых (вспомогательных) операций в условиях ...
... к точности, хотя это уменьшение весьма не значительное. 4.Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в работе, использовалась программа “Модель портального манипулятора МРЛ-901П в момент ...
0 комментариев