Навигация
Импульсная радиолокация
35505
знаков
1
таблица
15
изображений
4. Импульсная радиолокация
Почему же отказались от непрерывной радиолокации и отдали предпочтение импульсной? Главной проблемой непрерывной радиолокации оказалось измерение дальности. Непрерывное излучение позволяет установить наличие отражающего объекта в облучаемой зоне, определить направление на объект, но измерить дальность до объекта было трудно.
Казалось бы, можно определить расстояние по интенсивности принятого сигнала – чем дальше объект, тем слабее сигнал, но на самом деле интенсивность сигнала зависит не только от дальности, но и от величины и формы отражающего объекта, его ориентации, и на практике подобный метод измерения дальности не применяется. Можно использовать триангуляционные методы, применяющиеся в геодезии, когда расстояние определяется расчетом по известному расположению двух точек и по направлениям из каждой точки на объект (сравните: пеленгационный метод определения местоположения в радионавигации). Но для реализации такого измерения потребуется два приемника и точное измерение угловых координат, а также время для проведения расчетов.
Правда, уже был запатентован метод измерения дальности при непрерывном излучении есть, предполагающий излучение радиоволн с изменяющейся частотой, то есть частотно модулированных радиоволн. Об этом подробнее мы поговорим далее, а сейчас только отметим, что этот метод легко реализуется, если отражающий объект только один. А для радиолокации типовой является ситуация, когда отражающих объектов много, и для каждого нужно определить его координаты. В этой ситуации вне конкуренции оказался импульсный метод радиолокации, когда импульсы, отраженные от многих целей, разнесены по задержке и легко разделяются.
Еще один недостаток непрерывной радиолокации – необходимость разнесения на большое расстояние передатчика и приемника. Энергия излучаемой передатчиком электромагнитной волны должна быть очень большой, так как только незначительная часть ее возвращается от обнаруживаемого объекта к приемнику. Если мощный передатчик работает по соседству с высокочувствительным приемником, который должен реагировать на ничтожное количество отраженной энергии, то нужно принимать специальные меры защиты приемника от прямого попадания энергии, излучаемой передатчиком. В непрерывной радиолокации защита приемника обеспечивалась разнесением передатчика и приемника на большое расстояние.
В импульсной радиолокации работа передатчика и приемника разнесена по времени: когда излучается радиоимпульс, приемник закрыт; а когда принимается импульс, отраженный от цели, передатчик не работает. Поэтому приемник и передатчик могут находиться в одном месте. И кроме того, можно использовать одну антенну, работающую и на прием, и на передачу. Это значительно упрощает конструкцию РЛС. Для защиты приемника на время работы передатчика были разработаны специальные разрядники-переключатели “прием-передача”, закорачивающие вход приемника на время излучения радиоимпульса.
Но непрерывное излучение имеет и несомненное достоинство – оно позволяет измерять скорость объекта. Как известно, частота отраженного от движущегося объекта колебания fотр будет отличаться от частоты облучающего колебания fo на величину частоты Доплера Fд: fотр =fo + Fд, где Fд = 2Vfo/c. Конечно, доплеровский сдвиг частоты небольшой (например, при длине волны 3м и скорости объекта 360 км/ч доплеровский сдвиг составит всего 33 Гц), но его можно выделить узкополосным фильтром и измерить. Однако на заре радиолокации об измерении скорости еще не думали. В настоящее время разработаны импульсные РЛС малой скважности, которые позволяют измерять дальность до цели по задержке импульсного сигнала и скорость по доплеровскому сдвигу частоты.
5. Измерение угловых координат цели
Итак, перед первыми разработчиками систем радиообнаружения самолетов стояли, главным образом две задачи: обнаружить цель и запеленговать ее, то есть определить направление на цель.
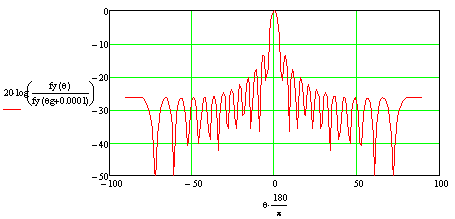
Мы уже познакомились с методами определения направления при изучении истории радионавигации. Таких методов три: по минимуму принимаемого сигнала, по максимуму принимаемого сигнала и по равносигнальной зоне. В радионавигации используются первый и последний методы, как наиболее точные. В радиолокации – второй и третий, так как отраженный от цели сигнал очень слабый, и прием сигнала возможен только, когда антенна направлена на цель. Кроме того, в радиолокации используются антенны с узкими диаграммами направленности, а для таких антенн определение направления по максимуму сигнала становится уже достаточно точным.
Для пеленгации в принципе не важно, каким будет излучение – непрерывным или импульсным – все определяется формой диаграммы направленности антенны. В первых радиолокационных станциях, таких как РУС-2 (СССР) и SCR-268 (США) поиск цели осуществлялся вручную. Оператор РЛС поворачивал антенную систему (естественно, с помощью двигателей), добивался максимума отраженного от цели сигнала и считывал угол с лимба, связанного электромеханической системой с осью антенны.
В последующих разработках радиолокационных станций обнаружения использовалось вращение диаграммы направленности с постоянной угловой скоростью в пределах зоны обзора (360о в РЛС кругового обзора, или в меньших пределах при секторном обзоре).
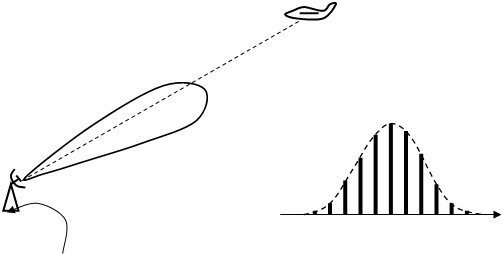
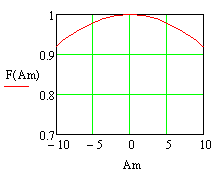
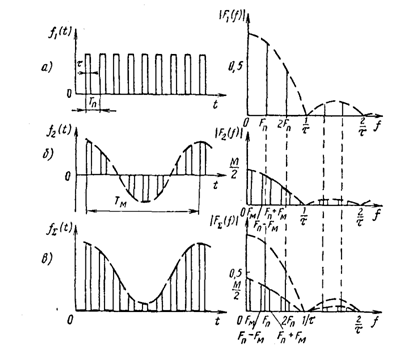
При этом от каждой цели, находящейся в зоне обзора, формируется сигнал примерно колокольной формы, по максимуму которого измеряется направление на цель. Для импульсного излучения форма сигнала на выходе приемника (последовательность импульсов) показана на рисунке выше справа. Такой сигнал называют пачкой импульсов.
В радиолокационных станциях сопровождения, осуществлявших слежение за одной целью, пеленгация производилась по равносигнальной зоне.
Похожие работы
... . Однако, если максимальное запаздывание сигнала, которое фиксируется данной РЛС, значительно меньше периода модуляции Временные диаграммы иллюстрирующие частотный метод измерения дальности Рис.1 (tд max << Тм), то нарушением линейности можно пренебречь и считать формулу (2) справедливой для любого закона частотной модуляции. Соотношение tд ...
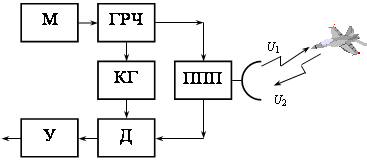
... производится не путем поворота всей антенны, а изменением фазового распределения в раскрыве АФАР с помощью фазовращателей. Целью данной работы является моделирование полотна АФАР моноимпульсной бортовой РЛС. 6. Моделирование полотна АФАР 1.Условия поставленной задачи. Задачей работы является моделирование полотна АФАР авиационной бортовой РЛС со следующими параметрами: - Длина волны ...
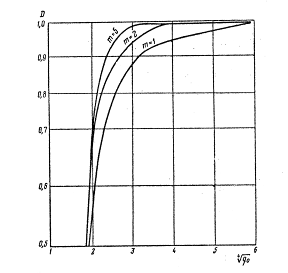

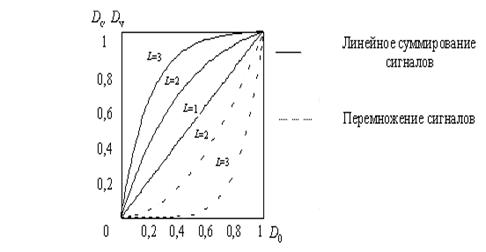
... соотношения импульсов с разными несущими частотами от 1:1 (равномерное распределение частот) до 1 : 5 потери в пороговом отношении сигнал/шум составляют не более 1 дБ. Наименее помехозащищенными являются многочастотные РЛС с линейным суммированием сигналов. Для их подавления достаточно создать эффективную помеху на одной из рабочих частот РЛС. Помеха по соответствующему частотному каналу ...
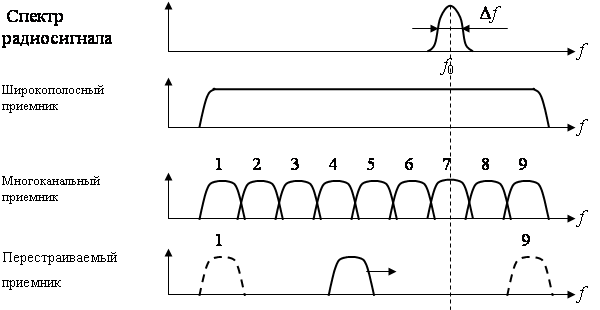
... стремятся получить наименьшее число поддиапазонов с целью сокращения объема аппаратуры. Обычно стараются сделать так, чтобы участки диапазонов, в которых работают наиболее широко применяемые радиолокационные станции противника, не попадали на границы поддиапазонов. С уменьшением числа поддиапазонов каждый из них расширяется. Чем шире поддиапазон, тем, естественно, больше время перестройки (для ...
0 комментариев