Навигация
Радиолокация как научно-техническое направление в радиотехнике
35505
знаков
1
таблица
15
изображений
Содержание
Введение
1. Измеряемые координаты 2. История исследования и разработки радиолокационных устройств3. Радиолокационное обнаружение
4. Импульсная радиолокация
5. Измерение угловых координат цели
6. Измерение дальности в импульсной радиолокации
7. РЛС обнаружения и РЛС слежения
8. Как можно измерять дальность при непрерывном излученииЗаключение
Список литературы
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилась в 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли советские ученые и инженеры П.К. Ощепков, М.М. Лобанов, Ю.К. Коровин, Б.К. Шембель. В Советском Союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружении войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю.Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
В радиолокации наиболее часто измеряются дальность между целью и РЛС, угловые координаты (азимут, угол места) и радиальная, относительно радиолокатора, составляющая скорости движения. (Азимут - это угол между направлением на цель и северным направлением, измеренный в горизонтальной плоскости. Угол места измеряется между вектором наклонной дальности и его проекцией на горизонтальную плоскость.) В задачу радиолокационного наблюдения в некоторых случаях входит также идентификация (распознавание) целей.
Системы радиолокации практически всегда входит в состав более сложных суперсистем. Эти суперсистемы имеют важное военное и народнохозяйственное значение и находят разнообразное применение: для управления воздушным движением, в навигации самолетов, кораблей, в геофизических и астрофизических исследованиях и др.
Системы радиолокации составляют информационную часть таких суперсистем и функционируют совместно и во взаимной связи с другими подсистемами суперсистемы (радионавигации, радиоуправления, передачи информации).
1. Измеряемые координаты
Радиолокация обеспечивает определение координат объекта по отраженному от него радиосигналу. Координаты определяются относительно места расположения радиолокатора, и основными являются две угловых координаты: азимут и угол места, и наклонная дальность. Их определение поясняется следующим рисунком.
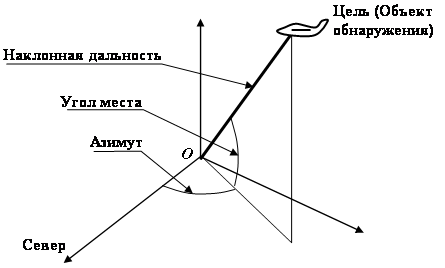
Радиолокатор располагается в точке О. Азимут измеряется в горизонтальной плоскости. Это угол между направлением на север и вертикальной плоскостью, проходящей через радиолокатор и цель. Угол места – это угол между касательной к земной поверхности и направлением на объект в вертикальной плоскости.
Уже в первом договоре на разработку радиолокационной аппаратуры, заключенном Управлением противовоздушной обороны Рабоче-крестьянской Красной Армии (УПВО РККА) и Ленинградским электрофизическим институтом (ЛЭФИ) в феврале 1934 г., были сформулированы следующие тактико-технические требования:
· Обнаружение самолетов и определение координат на высотах полета до 10 км и расстоянии до 50 км;
· Точность определения координат в пределах 2 – 5%;
· Определение количества самолетов (один, два, звено, эскадрилья и больше;
· Определение скорости самолета с точностью до 25 км/ч и курса с точностью 2 – 5%.
Ясно, что эти требования были скорее желаемыми, чем реально достижимыми, так как в то время сама возможность обнаружения самолетов по отраженному от них электромагнитному излучению была сомнительной, и выполнение одного единственного требования – обнаружение самолета на расстоянии 50 км было бы большим достижением.
Договор Главного артиллерийского управления (ГАУ) с ЛЭФИ (январь 1934 г.) предусматривал решение более скромной задачи: обнаружение самолета и его пеленгация с точностью, достаточной для управления зенитным прожектором.
Похожие работы
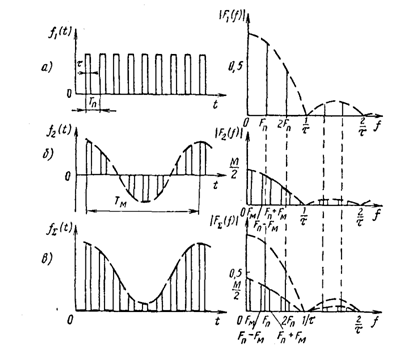
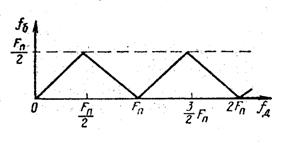
... . Однако, если максимальное запаздывание сигнала, которое фиксируется данной РЛС, значительно меньше периода модуляции Временные диаграммы иллюстрирующие частотный метод измерения дальности Рис.1 (tд max << Тм), то нарушением линейности можно пренебречь и считать формулу (2) справедливой для любого закона частотной модуляции. Соотношение tд ...
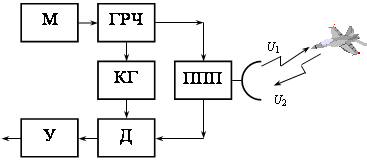
... производится не путем поворота всей антенны, а изменением фазового распределения в раскрыве АФАР с помощью фазовращателей. Целью данной работы является моделирование полотна АФАР моноимпульсной бортовой РЛС. 6. Моделирование полотна АФАР 1.Условия поставленной задачи. Задачей работы является моделирование полотна АФАР авиационной бортовой РЛС со следующими параметрами: - Длина волны ...
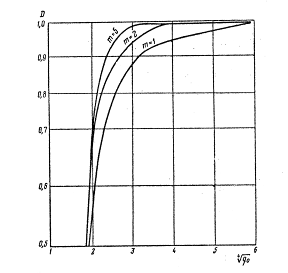

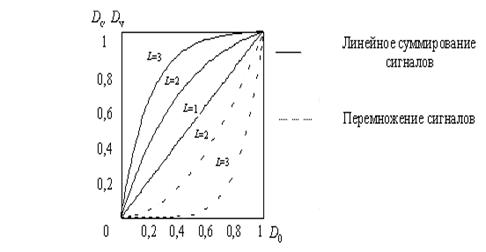
... соотношения импульсов с разными несущими частотами от 1:1 (равномерное распределение частот) до 1 : 5 потери в пороговом отношении сигнал/шум составляют не более 1 дБ. Наименее помехозащищенными являются многочастотные РЛС с линейным суммированием сигналов. Для их подавления достаточно создать эффективную помеху на одной из рабочих частот РЛС. Помеха по соответствующему частотному каналу ...
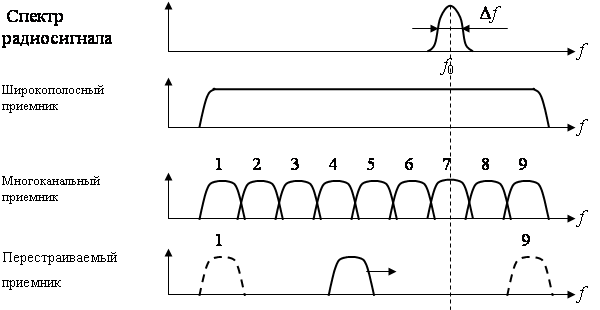
... стремятся получить наименьшее число поддиапазонов с целью сокращения объема аппаратуры. Обычно стараются сделать так, чтобы участки диапазонов, в которых работают наиболее широко применяемые радиолокационные станции противника, не попадали на границы поддиапазонов. С уменьшением числа поддиапазонов каждый из них расширяется. Чем шире поддиапазон, тем, естественно, больше время перестройки (для ...
0 комментариев