Моделювання задач масового обслуговування
Задача аналізу розімкнутої системи з очікуванням (потоки вимог Пуасоновські)
Задача аналізу замкнутої системи з очікуванням (потоки вимог Пуасоновські)
Метод побудови моделі
Результати моделювання
Призначення і область застосування
Огляд фізичних методів зберігання інформації на магнітних носіях
Спеціальна частина
Вибір і опис елементної бази
Резервування інформації
Характерні несправності і методи їх усунення
Вірогідність безвідмовної роботи
Аналіз необхідної конфігурації
Навигация
Огляд фізичних методів зберігання інформації на магнітних носіях
Моделювання задач масового обслуговування ЕОМ
93795
знаков
7
таблиц
8
изображений
2.1.4.2 Огляд фізичних методів зберігання інформації на магнітних носіях
На сьогоднішній день застосовують досить широкий спектр методів зберігання інформації на магнітних дисках, деякі методи морально застаріли, але дотепер використовуються в сполучи з IBM PC XT.
Метод MFM (Modified Frequency Modulation - модифікована частотна модуляція) використовується для запису на гнучкі диски, а також - в ранніх вінчестерах для PC XT. при використовуванні цього методу на одну доріжку вінчестера записується 17 секторів по 512 байт кожний.
Метод RLL (Run Length Limited - обмежена довжина серії) використовує більш щільну упаковку даних при записі, підвищуючи об'єм інформації на доріжці приблизно на 50%. Кодування проводиться так, щоб довжина серії нулів не виходила за межі заданих параметрів; звичайно мінімум рівний двом, а максимум - семи. Відповідно, метод часто позначається як RLL (2,7), а доріжку записується до 27 секторів.
Метод ARLL (Advanced RLL - поліпшений RLL) - подальший розвиток RLL у бік підвищення густини упаковки. Звичайно застосовується з параметрами (1,7) і (3,9), а доріжку записується 34 і більш сектори. Більшість сучасних вінчестерів використовує методи RLL або ARLL.
Метод ZBR (Zoned Bit Recording - зоновий запис бітів) - метод упаковки даних на доріжках диска. На відміну від перерахованих вище методів фізичного запису, ZBR є більш високорівневим методом і використовується в комбінації з одним з них, завдяки тому, що лінійна швидкість поверхні щодо головки на зовнішніх циліндрах вище, ніж на внутрішніх, біти на зовнішніх циліндрах записуються з більшою частотою (отже - густиною), ніж всередині. Звичайно на поверхні організовується до десятка і більш зон, усередині яких густина запису однакова.
При використовуванні ZBR геометрія диска стає неоднорідною зовнішні циліндри містять більше секторів, ніж внутрішні; по цьому на таких дисках використовується так звана умовна, або логічна геометрія, коли адреси логічних секторів перетворяться у фізичні внутрішнім контролером диска за допомогою спеціальних таблиць.
Перемикання режиму накопичувача здійснюється перемичкою, причому першим логічним диском є MASTER. Інтерфейс IDE AT підтримує тільки програмне уведення-виведення з використанням апаратного переривання IRQ14. Фізично інтерфейс реалізований у вигляді плоского 40-контактного кабелю, довжини, що рекомендується, 50 см.
2.1.4.3 Структурна схема пристрою
Призначення складових частин. Принцип роботи
жорсткий диск інформація пристрій
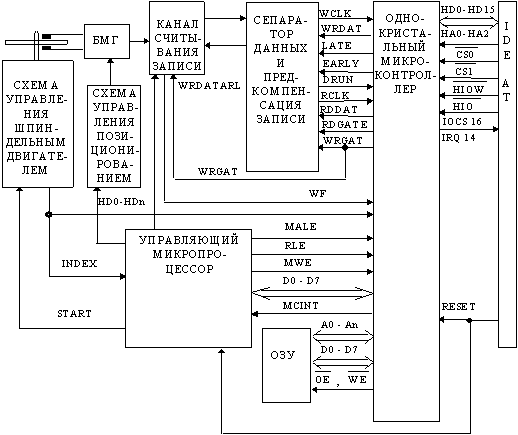
Рисунок 2.1 - Структурна схема НЖМД IDE AT.
INDEX - сигнал виробляється схемою управління двигуна шпінделя за один оборот диска;
START - дозвіл на запуск двигуна шпінделя;
HD0-HDn - двійковий код вибору головки прочитування/запису;
RDDATARLL - дані читання RLL;
WRDATARLL - дані записи RLL;
WF - сигнал виробляється схемою запису при помилці;
WCLK - синхроімпульси записуваних даних;
WRDATA - дані записи в коді NRZ;
LATE, EARLY - сигнали управління режимом предкомпенсации;
DRUN - вихід детектора поля синхронізації;
RCLK - синхроімпульси прочитуваних даних;
RDDATA - прочитувані дані в коді NRZ:
RDGATE - строб читання;
WRGATE - строб запису;
MALE-строб адреси управляючого мікропроцесора;
MRE - стоб читання управляючого мікропроцесора:
MWE - стоб записи управляючого мікропроцесора;
DO-D7 - внутрішня шина даних накопичувача;
MCINT - сигнал переривання від однокристального мікроконтролера;
/ОЄ - строб читання для буферного ОЗУ;
/WE - строб запису для буферного ОЗУ;
HDO-HD15, НАО-НА2 /CS0 /CSI /HIOW /HIOR /IOCS16, IRQ14, RESET - інтерфейсні сигнали.
Схема управління двигуном шпинделя. Двигун шпинделя НЖМД IDE AT як правило трифазний, це забезпечує більш стабільну швидкість обертання, що особливо важливо при підвищеній густині запису. З цієї ж причини у таких двигунів, як правило, три датчики Холу, що дозволяє мікросхемі управління двигуном шпінделя точніше підстроювати швидкість обертання диска. Більш високі вимоги до схеми управління двигуном шпінделя зв'язані не тільки з підвищеною густиною запису НЖМД IDE AT, але і з тим, що такі НЖМД мають малі габарити, в них застосовують 3-х дюймові диски, через це механічна система шпиндель-магнитні диски має невелику інерційність, що з одного боку, дозволяє більш швидше розкручувати і зупиняти магнітні диски, але з іншою така механічна система сильніше схильна детонації. В більшості накопичувачів, з соленойдным приводом магнітних головок, для забезпечення зворотного зв'язку мікросхеми управління двигуном шпінделя і самим двигуном шпінделя замість датчиків Холу використовується вбудована сервісна інформація вона використовується не тільки для позиціонування магнітних головок, але і для стабілізації швидкості обертання двигуна шпінделя. В таких НЖМД при подачі живлячої напруги двигун шпінделя розкручується у форсованому режимі без аналізу швидкості обертання магнітних дисків. Після цього спеціальна схема, з формату сервісної інформації, виділяє импульсы-сервометки, які подаються на мікросхему управління двигуном шпінделя, по цих імпульсах і відбувається подальша стабілізація швидкості обертання. Відмітною особливістю таких накопичувачів є наявність всього трьох провідників (фаз управління), що йдуть до двигуна шпінделя. В перших моделях НЖМД IDE AT швидкість обертання магнітних дисків складала, як правило 16,6 мс в сучасних моделях НЖМД, при застосуванні високопродуктивних однокристальних контролерів, для підвищення швидкості обміну, швидкість обертання значно збільшена і досягає 8 мс в 1 Гбайтних моделях.
Практично у всіх моделях НЖМД IDE AT дозвіл на запуск двигуна подається з управляючого мікропроцесора, після його ініціалізації, тому двигун шпінделя може зупинятися при появі інтерфейсного сигналу RESET, більш в деяких накопичувачах фірми Seagate запуск двигуна шпінделя проводиться тільки після повної внутрішньої діагностики накопичувача.
Схема управління позиціонуванням. В НЖМД IDE AT застосовують систему позиціонування, як з кроковим двигуном, так і з соленоидным приводом (звуковою котушкою), причому останнім часом система позиціонування з соленоидным приводом практично повністю витіснила систему позиціонування з кроковим двигуном. Це зв'язаний, перш за все, з такою характеристикою НЖМД, як середній час доступу. Другою причиною є все густина запису, що збільшується, за рахунок збільшення кількості циліндрів на робочій поверхні і як наслідок зменшення відстані між двома сусідніми доріжками. В сучасних НЖМД застосовують системи збалансованого ротаційного позиціонування, які більш надійні і займають значно менше місця в порівнянні з лінійними, що використовуються на перших моделях НЖМД. В накопичувачах з соленоидным двигуном, для розміщення сервісної інформації (необхідної для позиціонування магнітних головок) використовується два типи СІ:
СІ на окремій (виділеної) поверхні (dedicated surfase);
Вбудована СІ (embedded).
Остання у свою чергу підрозділяється на СІ розташовану між секторами і СІ вбудовану у формат. До першої відносяться такі моделі, в яких кількість сервометок на доріжці точно відповідає кількості секторів накопичувача і розташовані вони строго між секторами. Причому кількість сервоміток на доріжці міняється відповідно до зонного розподілу. В більш сучасних накопичувачах використовується СІ вбудована у формат. При цьому кількість сервометок на всіх доріжках однаково і рівно. В таких накопичувачах формат не прив'язаний до сервометкам і доріжку можна відформатувати на різну кількість секторів. Причому коли зустрічається сервометка, фізичний формат уривається (навіть якщо зустрічається поле даних) і продовжується тільки після її ідентифікації.
По-перше НЖМД IDЕ АТ з кроковим двигуном використовувалося звичайне фазове управління кроковим двигуном яке полягає в тому, що для переміщення на задану доріжку до фаз крокового двигуна необхідно прикласти послідовно дискретні напруги, при цьому вал двигуна провернеться на заданим кут. Ніякого зворотного зв'язку про положення головок така система не мала і місткості накопичувачів які використовували такий принцип позиціонування не перевищувала 40 Мбайт.
В більш пізніх НЖМД з кроковим двигуном сталі використовувати широтно-імпульсне фазове управління. В таких накопичувачах застосовується вбудований сервоформат і тому вони займають проміжне положення між накопичувачами з кроковим двигуном і накопичувачами з соленоидным приводом. Ідея широтно-імпульсного фазового управління полягає в наступному: після переміщення магнітних головок на задану доріжку відбувається підстроювання крокового двигуна на максимальну амплітуду ліченої сервісної інформації і лише після цього відбувається прочитування або запис даних. Для переміщення магнітних головок на один циліндр управляючий мікропроцесор подає на контролер ШИФУ код m, що приводить до переміщення МГ приблизно на один циліндр, після цього мікропроцесор прочитує код n з схеми виділення сервометок і порівнює цей код з еталонним значенням. При неспівпаданні коду (унаслідок зсуву з доріжки) проводиться коректування коду m і процес повторюється.
Системи управління з соленоидным двигуном (звуковою катушкою) є найскладнішими, але завдяки появі однокристальних сервомодуляторов стало можливим використовування соленоидного приводу в недорогих, масових моделях НЖМД. В даний час практично всі виробники накопичувачів сталі використовувати саме соленоидный двигун для систем позиціонування.
Принцип побудови системи з виділеною сервоповерхностью полягає в наступному: При виготовленні гермоблока накопичувача на одну з поверхонь (звичайно це сама нижня поверхня пакету дисків) записується спеціальна сервісна інформація. Магнітна головка, яка працює тільки на читання, постійно прочитує сервісну інформацію. СІ посилена і відфільтрована поступає в серводемодулятор, де розшифровується і потім визначається дійсне положення блоку магнітних головок. На підставі отриманої інформації подається дія на пристрій управління соленоидным двигуном. Таким чином здійснюється стеження за допомогою пристрою тонкого регулювання. Інша задача системи позиціонування полягає в створенні струмового імпульсу, у кожному конкретному випадку при переході за межі доріжки. Ініціатором такого імпульсу є управляючий мікропроцесор, який указує сервоконтроллеру номер необхідної доріжки. На підставі цього сервоконтроллер передає код необхідного струмового імпульсу в схему управління позиціонуванням, де за допомогою ЦАП формується його точна величина.
Для переміщення на задану доріжку схема управління позиціонуванням повинна сформувати струмовий імпульс. Після переміщення включається система тонкого регулювання, для точного підстроювання на доріжку.
В залежності від довгі переміщення вводиться поняття класу позиціонування по яких формуються струмові імпульси переміщення. Чим більше класів позиціонування у накопичувача тим швидше накопичувач знаходить потрібну доріжку. В сучасних накопичувачах кількість класів позиціонування рівно кількості серводорожек накопичувача - при цьому кожній довжині переміщення відповідає свій певний струмовий імпульс.
Абсолютно іншим способом розміщується сервоинформация при використовуванні принципу «Embedded servo». При виготовленні гермоблока сервісна інформація записується на кожній робочій поверхні - мітками. Як стандартне виконання широко застосовується формат «микро-магнум».
Сервосистема працює подібно системі з виділеною сервоповерхностью. Відмінності полягають в тому. що сервісна інформація, що знаходиться між секторами, виділяється з потоку даних накопичувача і поступає порціями. Тому після переміщення на необхідний циліндр ( навіть при перемиканні головки) необхідно пропустити декілька секторів для точного підстроювання на доріжку. При виконанні операції запису/читання, для того, щоб не була затерта сервометка. сигнал запису в канал поступає від сервоконтроллера тільки після того. як повністю лічена і ідентифікована сервометка. При її читанні сервоконтроллер формує секторні імпульси SEC/DR UN які поступають на однокристальний мікроконтролер.
Канал прочитування/запису. Важливою особливістю сучасних HDD є застосування зонно-секційного запису (ZBR), при якому весь дисковий простір розбивається на зони і в кожній зоні записується певна кількість секторів на доріжку. Кількість зон на 3-х дюймових магнітних дисках може досягати 20, а кількість секторів в зонах, залежно від місткості, коливається від 90- 140 в найпершій зоні і плавно зменшується до останньої, де може досягати 40 - 70. Такий метод ще називають методом з постійною густиною запису. Природно що канал прочитування/запису такого накопичувача повинен працювати : на різних частотах, при цьому перша зона працює на найвищій частоті і забезпечує найбільшу швидкість прочитування даних. Для корекції частотної характеристики каналу в таких накопичувачах використовують перебудовувані цифрові фільтри. В НЖМД IDE AT застосовують процесори читання даних з АРУ, підтримуючі кодування RI.L. Як комутатори попередніх підсилювачів читання/запису для феритових МГ застосовують добре що зарекомендували себе мікросхеми 32R117, 32R510, 32R4610, для тонкопленочных МГ - 32R520, 32R522, 32R2020 і ін.
Сепаратор даних і предкомпенсация запису. Сепаратора даних і схему предкомпенсации записи дуже часто роблять на одному кристалі, хоча між собою вони практично не зв'язані і функционнруют абсолютно роздільно. Основне призначення сепаратора даних полягає в очищенні цифрового сигналу від шумів при читанні і виділенні сигналів синхронізації RCLK.
Однокристальний мікроконтролер. Однокристальний мікроконтролер є найскладнішим елементом НЖМД IDE AT і є визначаючим в швидкості обміну даними між НЖМД і HOST.
Мікроконтролер має чотири порти, за допомогою яких він підключається до HOST, локальному мікропроцесору, RAM буферу і каналу обміну даними з НЖМД. Мікроконтролер є кінцевим автоматом керованим з боку локального мікропроцесора, з боку HOST доступні тільки стандартні регістри файлу завдання. Програмування однокристального мікроконтролера проводитися на етапі ініціалізації з боку локального мікропроцесора при цьому відбувається настройка на один з трьох методів кодування MFM, RLL або NRZ. вибирається режим CRC або ЕСС, встановлюється режим гнучкого або жорсткого розбиття на сектори (гнучким режим використовується в НЖМД IDE AT із зонно-секційним записом).
Контролер управління НЖМД є найскладнішою частиною однокристального мікроконтролера і є кінцевим автоматом, що виконує функції: - пошук адресного маркера: - читання сектора: - читання всіх секторів на доріжці: - запис сектора: - запис всіх секторів на доріжці: - запис ідентифікатора: - форматування одного сектора; - форматування доріжки. Управління контролером НЖМД здійснюється за допомогою регістрів управління, доступних з боку локального мікропроцесора.
Інтерфейс IDE AT. Організація інтерфейсу IDE AT.
Термін IDE (Imbedded Drive Electronics) - визначає будь-який інтерфейс системного рівня, абревіатура AT означає, що системою є комп'ютер IBM AT або сумісний з ним. Інтерфейс IDE був прекладен в 1988 р. для користувачів комп'ютерів IBM PC/XT і AT. Відмітною особливістю цього інтерфейсу є реалізація функцій контролера на платні НЖМД. Не дивлячись на широке використовування цього інтерфейсу в комп'ютерах IBM AT, стандартизован він тільки в 1990 р. під назвою АТА (ANSI ХЗТ9.2/90-143). В даному додатку описуються основні команди інтерфейсу АТА, окрім них стандарт АТА містить ряд додаткових команд використовуються не всіма HDD: - мультисекторные команди передачі даних Read Multiple, Write Multiple, Set Multiple: - команди передачі даних в режимі DMA Read DMA, Write DMA: - енергозберігаючі команди (Power Mode) - Sleep, Idle, Standby, Idle lmnaediate. Standby Immediate: - команди настройки режимів роботи накопичувача (Set Features). Платня, яка включається між системною шиною комп'ютера і НЖМД, виконує функції дешифратора базових адрес контролера і формувача інтерфейсних сигналів. В стандарті IDE AT можуть бути підключений два НЖМД, MASTER і SLAVE.
Похожие работы
....................................... 23 Додаток Г – результати роботи програми............................................................. 24 Вступ Темою данної курсової роботи є моделювання процесу надходження до ЕОМ повідомлень від датчиків та вимірювальних пристроїв. Це обумовлено тим, що постійне впровадження системи збирання та обробки інформації вимагає збільшення кількост ...
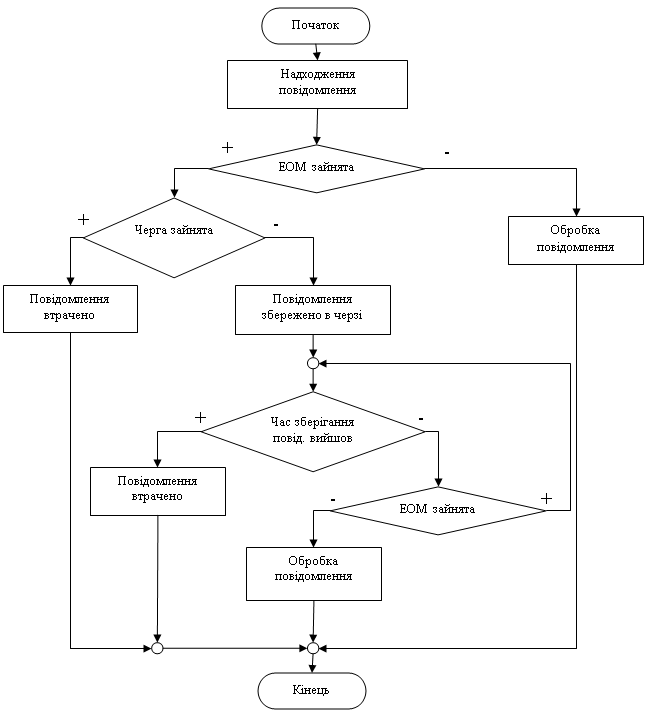
... їх обробки на ЕОМ можна представити у вигляді СМО. Тобто, модель заданої системи є дискретною стохастичною системою. Виконання імітаційного моделювання вказаного процесу надходження повідомлень від датчиків до ЕОМ та їх обробки на ЕОМ потребує проведення моделювання (імітацію) всіх подій, які можуть статись – отримання інформаційних повідомлень від датчиків, вхід і звільнення пам'яті ЕОМ, втрату ...
... кта та алгоритму його функціонування, або алгоритму процесу, а також уявлення опису на різноманітних мовах здійснюється взаємодією людини і ЕОМ. Система автоматизованого проектування - це комплеск засобів автоматизації проектування, взаємозв’язаних з необхідними підрозділами проектної організації або колективом спеціалістів (користувачем системи), які виконують автоматизоване проектування. САПР ...
... модель, яка опосередковує відносини між об’єктом, який вивчається, та суб’єктом, який пізнає (системним аналітиком). Головним гальмом для практичного застосування математичного моделювання в економіці є проблема наповнення розроблених моделей конкретною та якісною інформацією. Точність і повнота первинної інформації, реальні можливості її збору й опрацювання справляють визначальний вплив на виб ...
0 комментариев