Навигация
Нахождение переходной функции ЗСАУ и основных ПКР
15347
знаков
3
таблицы
6
изображений
5. Нахождение переходной функции ЗСАУ и основных ПКР.
Нахождение переходной характеристики ЗСАУ возможно провести двумя способами: решение ДУ классическим методом или методом обратного преобразования Лапласа.
Решим одним из способов (обратным преобразованием Лапласа) полученную передаточную функцию ЗСАУ.

Для начала найдем все возможные корни данного уравнения, воспользовавшись численным методом нахождения корней.
р1 = -4,048, р2 = -0,1878.
Для нахождения оставшихся 2 комплексных корней разделим характеристическое уравнение на квадратный трехчлен, полученный путем умножения двух найденных корней. Разделив, получим корни:
р3,4, = -0,071 ± j0,054
Перепишем исходное уравнение в виде и произведем необходимые вычисления:
Составим систему уравнений и определим неизвестные коэффициенты А, В, С и D.
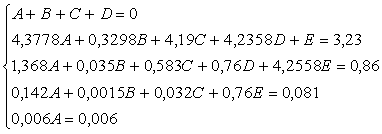
Решая полученную систему, получаем коэффициенты:
А = 1, В = -0,8108, С = 0,0029, D = -0,192, Е = -0,0788
Заменяя буквенные значения коэффициентов численными, и производя обратное преобразование Лапласа, получим:

Подставим различные значения t в полученное уравнение и получим переходную характеристику. Для этого снова воспользуемся пакетом MS Excel. График будет иметь вид:
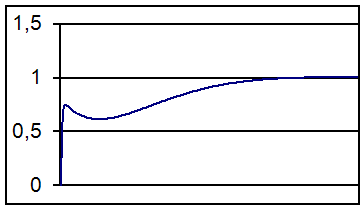
Как показали исследования, график переходной функции построенный в пакете VisSim30 аналогичен приведенному выше. Можно сделать вывод, что полученная переходная функция найдена верно.
Для нахождения основных показателей качества регулирования (ПКР), воспользуемся графиком, полученным при помощи пакета VisSim30.
Основными ПКР являются:
· Время переходного процесса tп/п
· Вид переходного процесса (апериодический, колебательный, монотонный)
· Абсолютное перерегулирование sабс
· Статическая ошибка eст
· Степень затухания y (определяется в случае колебательного процесса)
1. Время переходного процесса.
Временем переходного процесса считается то время, когда график переходной функции попадает в область значений от 0,95Yуст до 1,05Yуст, т.е. ±5% от установившегося значения и не выходит из этой области. Судя по графику переходного процесса, и по значениям, полученным в результате расчета при построении графика, видно, что время переходного процесса равно 40 секундам (tрег = tп/п = 40 сек).
2. По графику видно, что переходной процесс является колебательным. Колебания данного процесса настолько малы, что изменения значений относительно Yуст = 1 составляют тысячные доли.
3. Абсолютное перерегулирование sабс = Ymax – Yуст = 0,006218572.
4. Статическая ошибка. Система является статической если eст >0. Если eст = 0, то система является астатической. Судя по полученным значениям и по виду переходной характеристики, данная система является астатической, т.к. eст = 0.
5. Т.к. переходной процесс является колебательным и имеет А1 и А3 (первая и третья амплитуды переходного процесса), то можно найти и степень затухания. ![]()

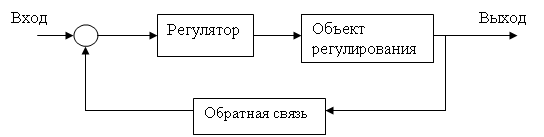
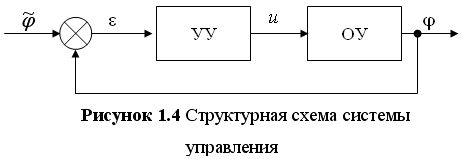
6. Функциональная схема
Системы Автоматического Управления в общем виде выглядит следующим образом:
7. Вывод
Математическая модель объекта регулирования системы, полученная в работе, является достаточно адекватной исходным данным. Об этом говорят значения полученных абсолютной и относительной погрешностей (D = 0,0001 и D = 0,0101 %). По частотным характеристикам самого объекта можно определить его некоторые свойства (полоса пропускания сигнала, устойчивость, отставание выходного сигнала от входного).
При получении математической модели всей системы был использован ПИД – регулятор. Сигнал измененный по заданному закону подается на объект регулирования и объект работает с измененным сигналом. Полученная замкнутая система является устойчивой.
Показатели качества регулирования, определенные в работе, говорят о том, что переходной процесс имеет: малое перерегулирование, что очень важно в системах подобного рода (контроль температуры и прочее); низкую степень колебательности, что также является показателем качества; система является астатической, т.е. система достигает необходимого выходного значения; что касается времени регулирования, то оно составляет 40 сек. Такое время переходного процесса является негативным в системах реального времени, что же касается систем контроля температуры, то этот показатель является довольно адекватным, т.к. невозможно достигнуть мгновенного изменения температуры в реальных системах.
Заключение
В данной курсовой работе было проведено математическое моделирование системы контроля температуры. Нужно заметить, что данный подход не только возможен, но и с успехом применяется во всех отраслях технического производства и контроля. Этот классический подход к разработке подобных систем основан на простых линейных звеньях. В реальных же системах процессы гораздо сложнее и линейностью не отличаются. Подобная методика расчета позволяет усвоить азы теории управления и углубиться в ее математическую моделирующую сторону. Это дает возможность получить теоретический навык в работе с подобными системами, а главное, что подобные исследования позволяют более смело подходить к различного рода разработкам.
При исследовании системы были получены различные показатели системы, в частности основные ПКР. Были сделаны выводы о качестве регулирования, а по виду переходных характеристик (построенных по исходным данным и полученным в результате исследования) можно было судить об адекватности полученных моделей (об этом говорят различного рода погрешности).
Система, расчет которой был проведен, вряд ли будет работать в реальной среде, в виду того, что приведенные методики расчетов были применены, в данном случае, для систем, на которые не оказываются внешние воздействия. В свою очередь, ход расчета системы, его последовательность вполне реально могут и применяются в настоящее время в исследованиях систем.
Список литературы
1. Курс лекций «Моделирование систем управления», Магомедов М.Я.
2. Курс лекций «Идентификация и диагностика систем», Омаров О.М.-С.
3. Курс лекций «Теория автоматического управления», Омаров М.-С.М.
Похожие работы
... полностью. Структура найденного решения наиболее сильно зависит от реализации единицы продукции №1 и №3, а также от уменьшения или увеличения всех имеющихся ресурсов. Часть № 2 "Расчет экономико-математической модели межотраслевого баланса Теоретические положения. Балансовый метод - метод взаимного сопоставления финансовых, материальных и трудовых ресурсов и потребностям в них. Балансовая ...
... параметрами, показателями объекта именно в то время. Дискретные модели отображают состояние объекта управления в отдельные, фиксированные моменты времени. Имитационными называют экономико-математические модели, используемые с целью имитации управляемых экономических объектов и процессов с применением средств информационной и вычислительной техники. По типу математического аппарата, применяемого в ...
... своевременное распределение средств на развитие. Данными вопросами я и занимаюсь в настоящей дипломной работе. 4. Математическое моделирование Интернет - услуг 4.1 Математическое моделирование dial-up подключений Сначала рассмотрим моделирование услуги предоставления доступа в Интернет по dial-up, так как данная услуга является показателем потенциальных абонентов для монопольной услуги ...

... проектирования. Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС. Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью ...
0 комментариев