Розробка функціонального алгоритму
Пам'ять – зберігає код стану (Q);
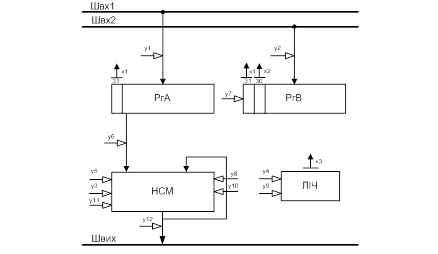
Формування схеми автомата Мура
Позначаємо вхід початкових та кінцевих станів;
Синтез дешифратора та його синтез у заданий базис
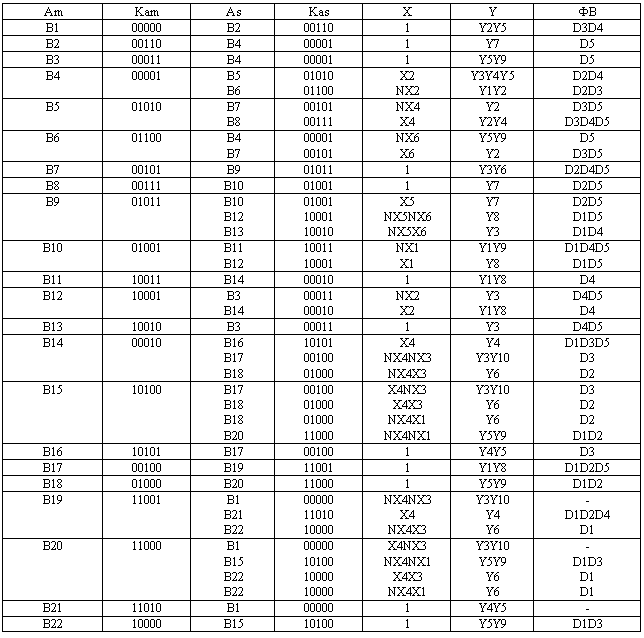
Синтез автоматів з програмованою логікою
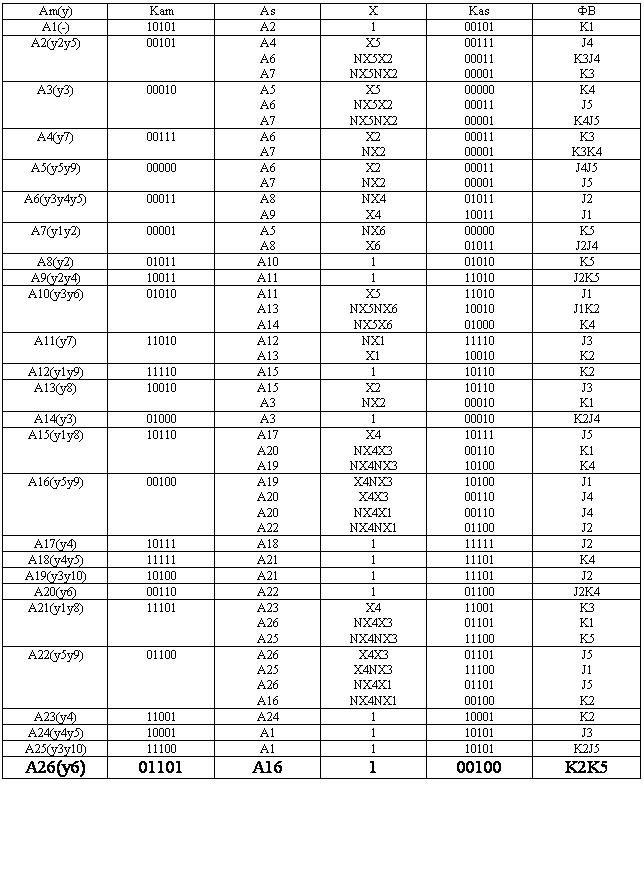
Синтез автомата з природною адресацією команд
ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
Навигация
ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
Синтез керуючих автоматів
26838
знаков
19
таблиц
22
изображения
4. ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
4.1 Порівняльна характеристика автоматів з жорсткою логікою
Розрахуємо усі дані по формулам:
![]()
N - кількість великих елементів.
Nвх – кількість входів на великі елементи.
n – кількість малих елементів.
nвх - кількість входів на малі елементи.
Nтр – кількість тригерів у схемі
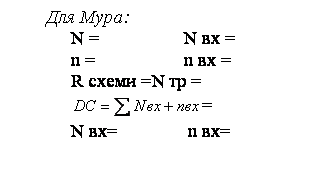
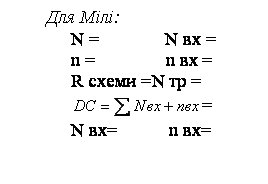
Табл. 4.1 – Таблиця обліку апаратурних витрат автоматів з жорсткою логікою
| R схеми | Тригер | DC | |
| Мура | |||
| Мілі |
З таблиці 4.1 видно, що R схеми у Мура менше, але входів на DC більше.
Тригерів однакова кількість.
4.2 Порівняльна характеристика автоматів з програмованою логікою
![]()
![]()
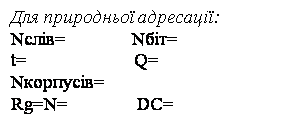
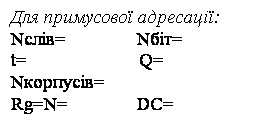
Табл.4.2 Таблиця обліку апаратурних витрат автоматів з програмованою логікою
| ПЗУ | Регістр лічильник | Комбінаційна частина | DC | |
| Примусова | ||||
| Природна |
У автомата з природною адресацією МК більш мінімальні апаратні витрати (корпусів), ніж у автомата з примусовою адресацією.
Тригерів однакова кількість. Кількість входів на DC однакова.
Комбінаційна частина у АПЛ з природною адресацією більша,
ніж у примусової.
ВИСНОВОК
операційний керуючий автомат програмований логіка
Виконано курсовий проект з дисципліни „Прикладна теорія цифрових автоматів” на тему „Синтез керуючих автоматів”.
Були синтезовані основні типи автоматів з жорсткою та програмованою логікою. Хоча всі приведені автомати справилися з поставленою задачею і в достатній мірі реалізували схему керуючого автомата, але є деякі позитивні і негативні особливості синтезу кожного з автоматів. Наприклад, автомати з жорсткою логікою мають досить велику комбінаційну частину, але вони не потребують елементів ROM, це робить ці автомати дуже оптимальними за ціною затрат.
Автомати з програмованою логікою виявились досить складними в розрахунках і реалізації, але це повністю компенсувалось універсальністю та гнучкістю програмування, чого не можна було досягнути на автоматах з жорсткою логікою.
Похожие работы
... льш прості операції які називаються мікроопераціями тобто кожна операція – це визначена послідовність мікрооперацій. Існують два основні типи керуючих автоматів 1. Керуючий автомат з жорсткою чи схемною логікою. Для кожної операції будується набір комбінаційних схем які в потрібних тактах збуджують відповідні керуючі сигнали. Іншими словами ...
... Таблиця переходів автомата 2.2.3. Кодування станів 2.2.5. Функції збудження тригерів та вихідних сигналів Закінчення Список використаної літератури 1 Введення Метою курсового проекту по дисципліні "Прикладна теорія цифрових автоматів" є закріплення основних теоретичних знань і практичних навичок у ході самостійної роботи. У ході роботи необхідно :1. спроектувати керуючий автомат Милі по ...

. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
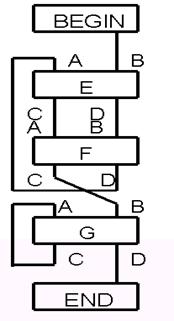
... функції менше, ніж МКНФ, обираємо для реалізації МДНФ функції. Реалізацію будемо проводити згідно з заданим базисом 2ЧИ-НІ. Застосуємо до обраної форми факторний алгоритм та одержимо скобкову форму для заданої функції: у = у = у = 2. Вибір блоків та структури ГСА Граф-схеми алгоритмів обираються кожним студентом індивідуально. Граф-схема складається з трьох блоків E, F, G і вершин ...
0 комментариев