Розробка функціонального алгоритму
Пам'ять – зберігає код стану (Q);
Формування схеми автомата Мура
Позначаємо вхід початкових та кінцевих станів;
Синтез дешифратора та його синтез у заданий базис
Синтез автоматів з програмованою логікою
Синтез автомата з природною адресацією команд
ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
Навигация
Розробка функціонального алгоритму
Синтез керуючих автоматів
26838
знаков
19
таблиц
22
изображения
1.2 Розробка функціонального алгоритму
Функціональна і структурна організація операційних пристроїв (ОУ) базується на принципі мікро програмного керування, сформульованому в 1951 році М. Уилксом. Відповідно до цього принципу будь-яка машинна операція розділяється на послідовність елементарних дій по обробці інформації – мікро операцій (МО). Порядок проходження мікро операцій визначається спеціальними логічними умовами (ЛУ), що у залежності від значень оброблюваної інформації приймають значення "істина" (1) або "неправда" (0). Алгоритм операцій в ОУ, записаний у термінах мікро операцій і логічних умов, що відбиває порядок проходження мікро операцій у часі, називається мікропрограмою.
Функція УА – це оперативна схема алгоритму, операторами якої є символи
![]() , що ототожнюються з МО, виконуваними ОА, як логічні умови використовуються булеві перемінні
, що ототожнюються з МО, виконуваними ОА, як логічні умови використовуються булеві перемінні ![]() . Найбільше часто операторна схема алгоритму представляється у виді граф-схеми алгоритму (ГСА).
. Найбільше часто операторна схема алгоритму представляється у виді граф-схеми алгоритму (ГСА).
Граф-схема алгоритму. Орієнтований зв'язаний граф – граф, що містить одну початкову вершину, одну кінцеву вершину, довільну безліч умовних і операторних вершин.
Будова ІМр автомата дозволяє паралельно виконувати одномісну та двумісну операції, тобто можливо виконувати за одне завантаження автомату завантаження двох операнд. Наприклад, у п’ятій вершині зроблено саме так.
Кожній дії, завантаженню автомата, відповідає Y[і].
Ідентичні дії відповідають однаковим командам, Y[і].
Логічні умови позначаються – XL, однаковим умовам відповідають однакові XL.
Функціональний алгоритм приведений на рисунку 1.5.

Рис. 1.5 – Функціональний алгоритм
1.3 Розробка структурної схеми автомата
1.3.1. Визначення набору регістрів пам’яті:
Rg : {RA, RB, RC, RS1, RS2, RS3}
1.3.2. Набір комбінаційних схем:
Одномісні: КС1 : {L1, L2, L3, R1, R2, R3}
На шину C повинні поступати всі аргументи одномісних операцій.
Двомісні: КС2: {Sum, Sub}
Припустимо, що операція відіймання виконується наступним чином:
Sub := B - A, тому від’ємне завжди повинно знаходитись на шині B, а від’ємник на шині А. В іншій двомісній операції Sum порядок операндів значення не має.

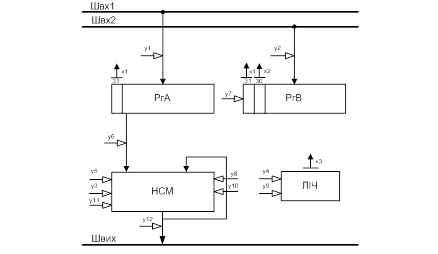
Рис. 1.6 – Структурна схема автомата
1.3.3. Зв'язки між регістрами та локальними шинами
Наша схема має три шини: А та B – двомісні, та шина C – одномісна.
A {RA, RB, RC, RS1, RS2, RS3}
B {RA, RB, RC, RS1, RS2, RS3}
C {RA, RB, RC, RS1, RS2, RS3}
1.3.4. Зворотні зв'язки шин Z1 та Z2 з регістрами пам’яті
Шини, що є результативними:
Z1 – результати одномісних операцій, а Z2 – двомісних операцій.
Z1 {RA, RB, RC, RS1, RS2, RS3}
Z2 {RA, RB, RC, RS1, RS2, RS3}
Кожний елемент, котрий діє у схемі може виконуватись тільки при наявності відповідного керуючого сигналу y[n].
у1, у2, у3 – завантаження початкових даних на шини.
у4– у15 – завантаження даних у регістри пам'яті.
у16–у33 – завантаження з пам'яті на локальні шини А, B, C.
у34, у39 – завантаження результатів одномісних операцій на шину Z1.
y40–у41 – завантаження результатів двомісних операцій на шину Z2.
Отримані таким чином дані заносимо до таблиці 1.1
Табл. 1.1 –Таблиця мікрооперацій
| Мікрооперація | A | B | C | Z1 | Z2 | Result | |||||||
| Y | формула | регістр | y | регістр | y | регістр | y | форм. | y | форм. | y | регістр | y |
| 1 | RA := <A> RB := <B> | <B> | y2 | <A> | y1 | RA:=Z2 RB:=Z1 | y4 y7 | ||||||
| 2 | RC := <C> | <C> | y3 | RC:=Z2 | y8 | ||||||||
| 3 | RS3 := RA + RB | RA | y17 | RB | y21 | RA+RB | y40 | RS3:=Z2 | y14 | ||||
| 4 | RS2 := RA – RB | RB | y20 | RA | y18 | RA-RB | y41 | RS2:=Z2 | y12 | ||||
| 5 | RS1 := L3(RS2) | RS2 | y28 | L3(RS2) | y36 | RS1:=Z1 | y11 | ||||||
| 6 | RS1 := RS1 – RS2 | RS2 | y29 | RS1 | y27 | RS1-RS2 | y41 | RS1:=Z2 | y10 | ||||
| 7 | RS2 := L2(RA) | RA | y16 | L2(RA) | y35 | RS2:=Z1 | y13 | ||||||
| 8 | RS3 := L1(RB) | RB | y19 | L1(RB) | y34 | RS3:=Z1 | y15 | ||||||
| 9 | RS1 := RS2 – RS3 | RS3 | y32 | RS2 | y30 | RS2-RS3 | y41 | RS1:=Z2 | y10 | ||||
| 10 | RS1 := L2(RA) | RA | y16 | L2(RA) | y35 | RS1:=Z1 | y11 | ||||||
| 11 | RS1 := RS1 – RA | RA | y17 | RS1 | y27 | RS1-RA | y41 | RS1:=Z2 | y10 | ||||
| 12 | RS1 := R1(RS1) | RS1 | y25 | R1(RS1) | y37 | RS1:=Z1 | y11 | ||||||
| 13 | RS1 := RS1 – RB | RB | y20 | RS1 | y27 | RS1-RB | y41 | RS1:=Z2 | y10 | ||||
| 14 | RS3 := RB – RA | RA | y17 | RB | y21 | RB-RA | y41 | RS3:=Z2 | y14 | ||||
| 15 | RS3 := R1(RB) | RB | y19 | R1(RB) | y37 | RS3:=Z1 | y15 | ||||||
| 16 | RS2 := RA – RS3 | RS3 | y32 | RA | y18 | RA-RS3 | y41 | RS2:=Z2 | y12 | ||||
| 17 | RS2 := RA + RB RS3 := L1(RC) | RA | y17 | RB | y21 | RC | y22 | L1(RC) | y34 | RA+RB | y40 | RS2:=Z2 RS3:=Z1 | y12 y15 |
| 18 | RS2 := RS2 – RS3 | RS3 | y32 | RS2 | y30 | RS2-RS3 | y41 | RS2:=Z2 | y12 | ||||
| 19 | RS2 := RS2 – RC | RC | y23 | RS2 | y30 | RS2-RC | y41 | RS2:=Z2 | y12 | ||||
| 20 | RS3 := L1(RB) | RB | y19 | L1(RB) | y34 | RS3:=Z1 | y15 | ||||||
| 21 | RS3 := RA – RS3 | RS3 | y32 | RA | y18 | RA-RS3 | y41 | RS3:=Z2 | y14 | ||||
| 22 | RS2 := L3(RS3) | RS3 | y31 | L3(RS3) | y36 | RS2:=Z1 | y13 | ||||||
| 23 | RS2 := RS2 – RS3 | RS3 | y32 | RS2 | y30 | RS2-RS3 | y41 | RS2:=Z2 | y12 | ||||
| 24 | RS2 := R3(RS2) | RS2 | y28 | R3(RS2) | y39 | RS2:=Z1 | y13 | ||||||
| 25 | RS3 := RC + RB | RB | y20 | RC | y24 | RB+RC | y40 | RS3:=Z2 | y14 | ||||
| 26 | RS3 := L1(RS3) | RS3 | y31 | L1(RS3) | y34 | RS3:=Z1 | y15 | ||||||
| 27 | RS3 := RS3 + RC | RS3 | y32 | RC | y24 | RS3+RC | y40 | RS3:=Z2 | y14 | ||||
| 28 | RC := L2(RB) RS3 := RA – RB | RB | y20 | RA | y18 | RB | y19 | L2(RB) | y35 | RA-RB | y41 | RC:=Z1 RS3:=Z2 | y9 y14 |
| 29 | RS3 := RS3 – RC | RC | y23 | RS3 | y33 | RS3-RC | y41 | RS3:=Z2 | y14 | ||||
| 30 | RS3 := RC – RA | RA | y17 | RC | y24 | RC-RA | y41 | RS3:=Z2 | y14 | ||||
| 31 | RS3 := R2(RS3) | RS3 | y31 | R2(RS3) | y38 | RS3:=Z1 | y15 | ||||||
| 32 | RS1 := L1(RS1) | RS1 | y25 | L1(RS1) | y34 | RS1:=Z1 | y11 | ||||||
| 33 | RS1 := RS2 + RS1 | RS1 | y26 | RS2 | y30 | RS1+RS2 | y40 | RS1:=Z2 | y10 | ||||
| 34 | RS1 := RS2 – RS1 | RS1 | y26 | RS2 | y30 | RS2-RS1 | y41 | RS1:=Z2 | y10 | ||||
| 35 | RS1 := L2(RS3) | RS3 | y31 | L2(RS3) | y35 | RS1:=Z1 | y11 | ||||||
| 36 | RS1 := RS2 + RS1 | RS1 | y26 | RS2 | y30 | RS1+RS2 | y40 | RS1:=Z2 | y10 | ||||

Рис. 1.7 – Структурна граф-схема операційного автомата
2. СИНТЕЗ КЕРУЮЧИХ АВТОМАТІВ З ЖОРСТКОЮ ЛОГІКОЮ
На практиці використовуються дві моделі МПА - автомат Милі й автомат Мура, розходження між якими полягає у функції виходу. В автоматі Милі вихідний сигнал залежить від поточного стану і вхідного сигналу, а в автоматі Мура‑ тільки від стану. Незалежно від типу МПА для їхнього синтезу використовується однакова методика, що включає наступні етапи:
1. Оцінка станів автомата на ГСА.
2. Побудова таблиці переходів.
3. Кодування станів УА.
4. Побудова прямої структурної таблиці.
5. Формування системи булевських функцій (СБФ) для вихідних сигналів і функцій збудження елементів пам'яті
6. Синтез схеми в заданому елементному базисі.
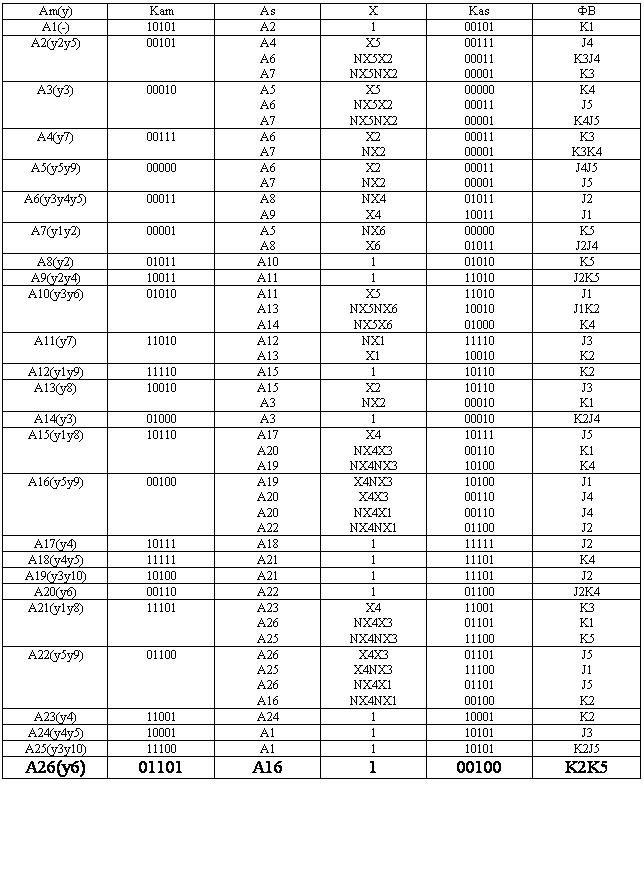
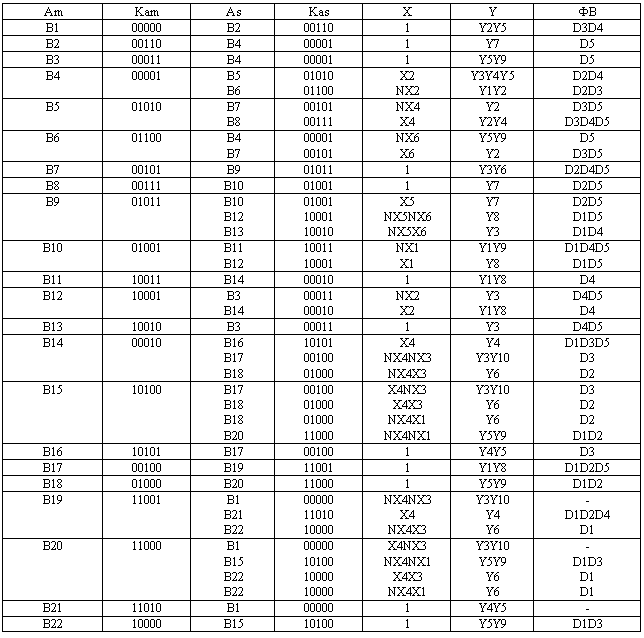
2.1 Методика синтезу автомата Мура
 На першому етапі початкова і кінцева вершини відзначаються окремим станом.
На першому етапі початкова і кінцева вершини відзначаються окремим станом.
Побудова таблиці переходів зводиться, до формувань по відзначеної ГСА таблиці, що містить стовпці: am - вихідний стан; as - стан переходу; X(am, as) - кон’юнкція вхідних перемінних, визначальний перехід (am, as) і відповідна функції переходу іj, де Yі відзначений станом am, Y – стан As, Y(am) - вихідні сигнали; h=1, H - номер переходу.
При кодуванні станів необхідно прагнути до такого кодування, що зменшує кількість функцій збудження, що приймають одиничне значення, і, отже, складність схеми УА.
Для цих цілей рекомендується використовувати алгоритми кодування.
Структурна схема автомата Мура (див. рис. 2.1):
Похожие работы
... льш прості операції які називаються мікроопераціями тобто кожна операція – це визначена послідовність мікрооперацій. Існують два основні типи керуючих автоматів 1. Керуючий автомат з жорсткою чи схемною логікою. Для кожної операції будується набір комбінаційних схем які в потрібних тактах збуджують відповідні керуючі сигнали. Іншими словами ...
... Таблиця переходів автомата 2.2.3. Кодування станів 2.2.5. Функції збудження тригерів та вихідних сигналів Закінчення Список використаної літератури 1 Введення Метою курсового проекту по дисципліні "Прикладна теорія цифрових автоматів" є закріплення основних теоретичних знань і практичних навичок у ході самостійної роботи. У ході роботи необхідно :1. спроектувати керуючий автомат Милі по ...

. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
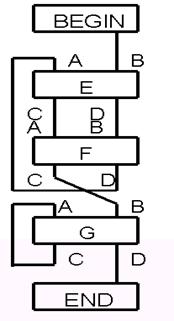
... функції менше, ніж МКНФ, обираємо для реалізації МДНФ функції. Реалізацію будемо проводити згідно з заданим базисом 2ЧИ-НІ. Застосуємо до обраної форми факторний алгоритм та одержимо скобкову форму для заданої функції: у = у = у = 2. Вибір блоків та структури ГСА Граф-схеми алгоритмів обираються кожним студентом індивідуально. Граф-схема складається з трьох блоків E, F, G і вершин ...
0 комментариев