Розробка функціонального алгоритму
Пам'ять – зберігає код стану (Q);
Формування схеми автомата Мура
Позначаємо вхід початкових та кінцевих станів;
Синтез дешифратора та його синтез у заданий базис
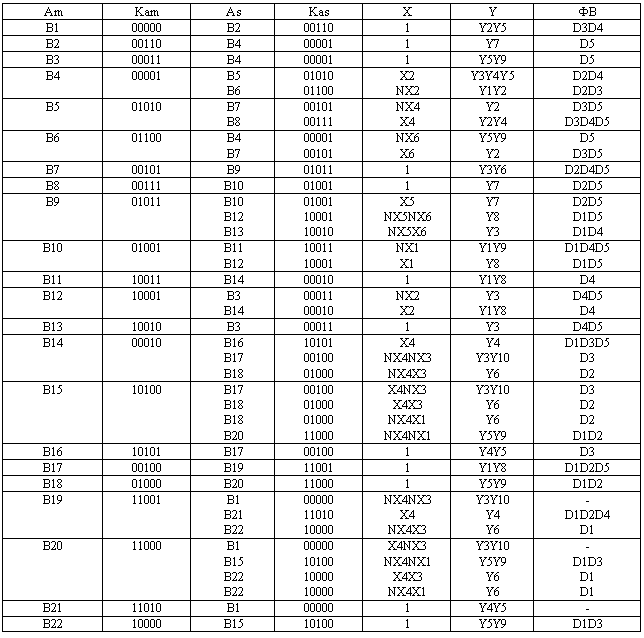
Синтез автоматів з програмованою логікою
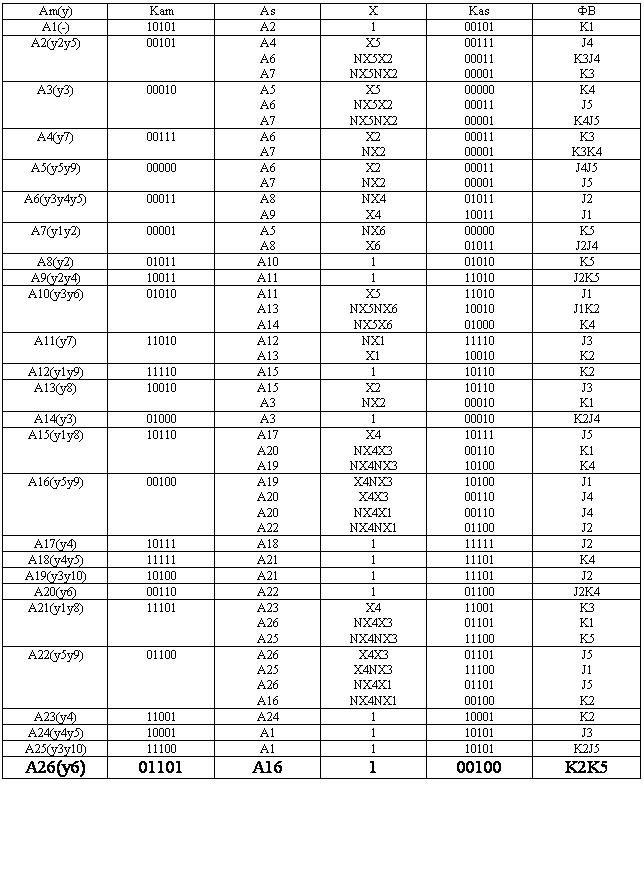
Синтез автомата з природною адресацією команд
ПОРІВНЯЛЬНА ХАРАКТЕРИСТИКА АВТОМАТІВ
Навигация
Синтез керуючих автоматів
Синтез керуючих автоматів
26838
знаков
19
таблиц
22
изображения
ВСТУП
Принцип мікропрограмного керування припускає, що цифровий пристрій складається з двох частин: операційний автомат (ОА) і керуючий автомат (КА). ОА виконує найпростіші операції (мікрооперації) типу зсув, алгебраїчне додавання, кон’юнкція, диз’юнкція і т.п. КА формує послідовність керуючих символів в ОА, під впливом яких ОА реалізує більш складні алгоритми. Такі послідовності операцій називаються мікропрограмами та, звичайно, записуються у вигляді граф-схеми алгоритму.
КА розділяються на дві великі групи: автомати з жорсткою логікою та автомати з програмованою логікою. У свою чергу автомати з жорсткою логікою підрозділяються на автомати, виконані за схемою Мілі (КА Мілі) і за схемою Мура (КА Мура), автомати з програмованою логікою – на автомати з примусовою адресацією та з природною адресацією.
В автоматах з жорсткою логікою схема автомата однозначно інтерпретує граф-схему мікропрограми. В автоматах із програмованою логікою граф-схема інтерпретується у вигляді програми, що зберігається в пам’яті автомата.
1. СИНТЕЗ ОПЕРАЦІЙНОГО АВТОМАТА
1.1 Аналіз вхідних даних
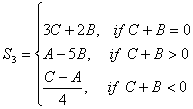
Загальна формула для обчислювання результату S має такий вигляд:
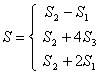
![]()
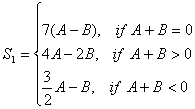
Формулі ![]() ,
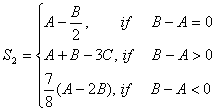
, ![]() та
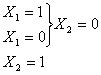
та ![]() згідно з варіантом завдання:
згідно з варіантом завдання:
Загальний алгоритм для обчислювання формули S приведений на рисунку 1.1.
Для обчислювання формули S використовується ІМp-модель (Individual Mutual with Parallel part - IMp).
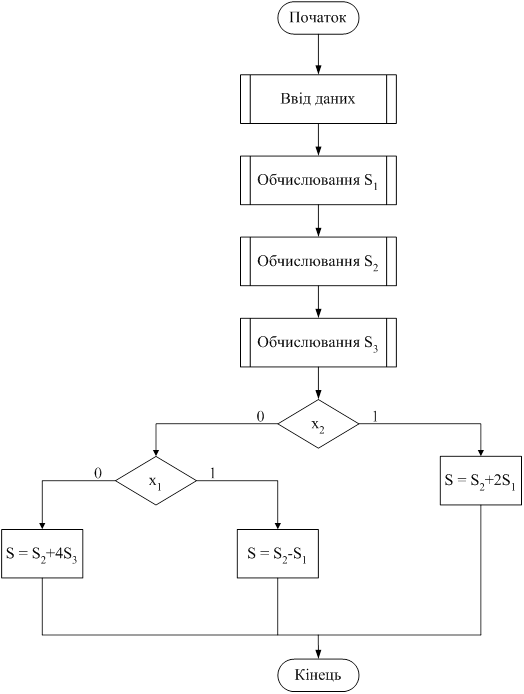
Рис. 1.1 – Загальний алгоритм для обчислювання формули S
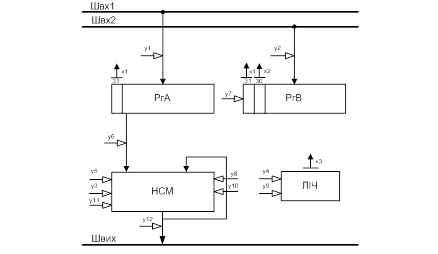
Схему взаємодії операційного та керуючої частин у цифровому просторі зображено на рисунку 1.2.
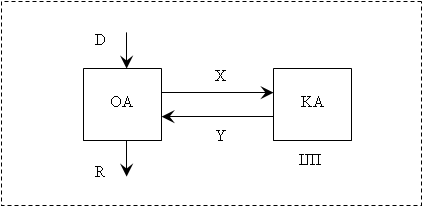
Рис. 1.2 – Структура цифрового пристрою
Структурна схема ІМp - моделі зображена на рисунку 1.3

![]()
![]()
![]()
![]()
![]()
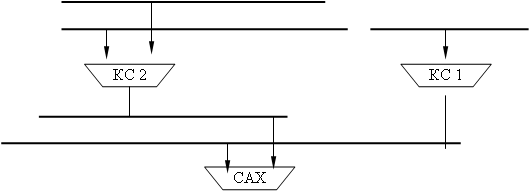 | |||||||||
Рис. 1.3 – Структура операційного пристрою
Пам’ять автомата складається з регістрів загального призначення R1, ... , Rn.
Локальні шини А1, А2, A3 призначені для прийому інформації з пам’яті та передачі її на комбінаційні схеми (КС).
В даному випадку використовуються КС двох типів: одномісні та двомісні.

Рис. 1.4 – Приклад комбінаційних схем
Однак, у даному ОА використовуються лише деякі з них.
Похожие работы
... льш прості операції які називаються мікроопераціями тобто кожна операція – це визначена послідовність мікрооперацій. Існують два основні типи керуючих автоматів 1. Керуючий автомат з жорсткою чи схемною логікою. Для кожної операції будується набір комбінаційних схем які в потрібних тактах збуджують відповідні керуючі сигнали. Іншими словами ...
... Таблиця переходів автомата 2.2.3. Кодування станів 2.2.5. Функції збудження тригерів та вихідних сигналів Закінчення Список використаної літератури 1 Введення Метою курсового проекту по дисципліні "Прикладна теорія цифрових автоматів" є закріплення основних теоретичних знань і практичних навичок у ході самостійної роботи. У ході роботи необхідно :1. спроектувати керуючий автомат Милі по ...

. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
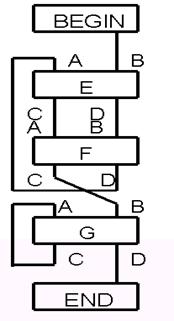
... функції менше, ніж МКНФ, обираємо для реалізації МДНФ функції. Реалізацію будемо проводити згідно з заданим базисом 2ЧИ-НІ. Застосуємо до обраної форми факторний алгоритм та одержимо скобкову форму для заданої функції: у = у = у = 2. Вибір блоків та структури ГСА Граф-схеми алгоритмів обираються кожним студентом індивідуально. Граф-схема складається з трьох блоків E, F, G і вершин ...
0 комментариев