Эксплуатационно-технические требования к параметрам реле железнодорожной автоматики
Анализ методов контроля параметров электромагнитных реле железнодорожной автоматики
Автоматизированные стенды для измерения и контроля параметров реле
Анализ методов автоматизации измерения механических параметров реле
Навигация
Анализ методов автоматизации измерения механических параметров реле
Электромагнитные реле железнодорожной автоматики
41281
знак
0
таблиц
2
изображения
5. Анализ методов автоматизации измерения механических параметров реле
При автоматизации измерения параметров электромагнитных реле наибольшую трудность вызывает разработка устройств для измерения механических параметров реле. Системы для измерения механических параметров реле электрическими методами строятся по трехзвенной структуре: 1) первичный датчик, который осуществляет преобразование механического параметра в электрический сигнал; 2) блок преобразования, который реализует обработку сигнала (масштабирование, линеаризация, и т.п.); 3) блок регистрации.
Для расчета механических характеристик реле необходимо знать координаты положения якоря d при перемещении в любой момент времени t. Все методы контроля положения якоря d(t) можно разделить на два вида: контактные и бесконтактные [32].
Контактные методы контроля подразумевают механическое соединение измерительной системы и проверяемого реле [33 - 38]. Общий принцип работы контактных датчиков основан на кинематическом воздействии исследуемого реле на подвижную часть измерительной системы. Перемещение подвижной части приводит к изменению электрических параметров измерительной системы и как следствие к изменению электрического сигнала на выходе датчика. По типу контролируемого электрического параметра измерительного датчика, различают индуктивные, емкостные, резистивные (потенциометрические преобразователи или тензодатчики) и оптоэлектронные контактные системы.
Контактные способы не получили широкого распространения, так как обладали рядом недостатков, не позволяющих создавать на их базе автоматизированных систем измерения механических параметров реле: необходимость снятия кожуха реле; большое количество ручных операций (подключение измерительной системы, калибровка датчика для каждого реле и т.п.); значительное обратное влияние самой измерительной системы на механические параметры реле; сложность конструкции измерительной системы и большое время измерения параметров одного реле.
Более перспективными являются бесконтактные методы измерения механических параметров реле. По сравнению с контактными, бесконтактные методы позволяют измерять механические параметры реле без снятия кожуха реле, не оказывают влияния на параметры самого реле, а также гораздо проще в изготовлении и эксплуатации. Это позволяет строить на базе бесконтактных датчиков перемещения якоря полуавтоматические и автоматические стенды для измерения механических параметров реле. Классификация бесконтактных датчиков приведена на рис. 2.
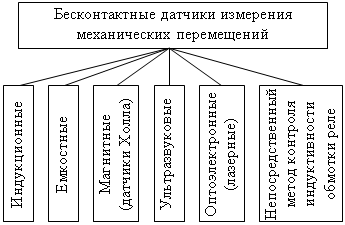 |
Рис. 2. Классификация бесконтактных датчиков измерения механических перемещений
Большую группу составляют индукционные датчики перемещения, принцип действия которых основан на явлении электромагнитной индукции [13,39-44]. Датчик представляет собой разомкнутый П - или Ш - образный магнитопровод, полюсные наконечники, которого замыкаются якорем реле. На магнитопровод наматывается измерительная обмотка, которая включается в колебательный контур автогенератора LC-типа. При движении якоря, изменяется индуктивность контура LC-генератора, а также потери в контуре из-за влияния вихревых токов, возникающих в якоре реле. При изготовлении индукционных датчиков используются оба явления. К общим недостаткам индукционных датчиков перемещения можно отнести:
- нелинейная зависимость выходного напряжения датчика от хода якоря;
- контроль перемещения якоря возможен только для реле имеющих корпус из диэлектрика;
- нестабильность работы из-за влияния температуры и напряжения питания на параметры обмоток датчиков, что вызывает изменение сигнала на выходе датчиков при неподвижном якоре.
Основным недостатком рассмотренных датчиков является невозможность создания полностью автоматизированной измерительной системы, так как для каждого реле индукционные датчики требуют индивидуальной настройки и калибровки.
Измерительные системы, использующие магнитный метод, строятся на датчиках положения якоря выполненных на элементах Холла [45 - 48]. Датчик Холла размещается на неподвижном сердечнике и при перемещении якоря с него снимается напряжение, пропорциональное магнитной индукции. Изменение магнитной индукции, пропорционально скорости движения якоря dd/dt. Проинтегрировав напряжение, пропорциональное dd/dt получим напряжение, пропорциональное координате якоря электромагнитного реле. К недостаткам данного метода можно отнести необходимость снятия кожуха реле для крепления датчика Холла, а также то, что не у всех типов реле есть место на сердечнике для размещения датчика Холла.
Ультразвуковые методы измерения перемещений, основаны на измерении времени прохождения сигнала от излучателя до препятствия и обратно [49]. Метод обладает небольшой погрешностью (0,5-1%), но на погрешность существенное влияние оказывает температура воздуха, от которой зависит скорость распространения ультразвука. К недостаткам также можно отнести сложность аппаратуры и невозможность измерять параметры реле с металлическим корпусом.
Оптоэлектронный преобразователь [20,50] состоит из источника светового потока и блока фотодиодов. Сфокусированный световой поток проходит через зазор между якорем и сердечником реле и попадает на фотодиоды. Сопротивление фотодиодов зависит от величины светового потока, поэтому при движении якоря, напряжение на выходе блока фотодиодов будет изменяться. Для улучшения метрологических характеристик оптоэлектронной измерительной системы в качестве источника светового потока применяют лазерные излучатели [21]. Недостатками таких измерительных систем являются сложность оборудования и высокая стоимость.
Отдельно можно выделить способы оценки качества контактной системы реле, используемые при массовом производстве, по времени дребезга контактов [51,52], а также для определения межконтактного зазора по времени перелета контактов [53 - 55]: Lмкз=K×tперелета , где К – коэффициент для данного типа реле.
Наиболее перспективным методом измерения механических параметров реле является непосредственный метод контроля за изменением индуктивности обмотки реле. Во время движения якоря уменьшается физический зазор между якорем и сердечником, что приводит к изменению параметров магнитной цепи реле и как следствие к изменению индуктивности обмотки реле. Таким образом, изменение индуктивности обмотки несет информацию о координате положения якоря. Используются два способа измерения индуктивности обмотки реле: включение обмотки реле в измерительную систему [56,57] и по форме тока в обмотке реле при включении или выключении реле [58-67].
Для железнодорожных реле первого класса надежности наиболее перспективным является способ вычисления механических параметров по форме тока в обмотке реле [13,24], однако методика вычисления до сих пор не разработана.
Выводы. Постановка цели и задач научно-исследовательской работы
Приведенный выше анализ технологии проверки параметров реле, применяемый в настоящее время в РТУ, а также разрабатываемых методов автоматизации измерения параметров электромагнитных реле железнодорожной автоматики, позволяет сделать следующие выводы.
Существующая технология проверки параметров реле и релейных блоков в РТУ не обеспечивает необходимого качества обслуживания устройств железнодорожной автоматики, морально и технически устарела, а также требует большого количества ручных операций, что приводит к значительным затратам времени на проверку реле и релейных блоков. Помимо этого, используемая технология не позволяет с необходимой точностью измерить такие механические параметры реле как неодновременность замыкания и размыкания контактов, совместный ход контактов, которые влияют на коммутационный ресурс и надежность работы реле.
2. Разработанные устройства и стенды для автоматизации измерения параметров электромагнитных реле железнодорожной автоматики не получили широкого распространения из-за их низкой надежности и сложности в эксплуатации, высокой стоимости и значительных массогабаритных показателей.
3. Существующие методы автоматизации измерения механических параметров электромагнитных реле не позволяют измерять значения механических параметров, а только производить комплексную оценку качества работы реле. Большинство данных методов не учитывают специфику конструкции железнодорожных реле первого класса надежности и поэтому не пригодны для применения в РТУ при измерении параметров реле и релейных блоков. Наиболее перспективным является метод вычисления механических параметров реле по форме тока переходного процесса, для внедрения которого необходимо разработать математическое обеспечение.
Целью диссертационной работы является повышение безопасности релейных систем железнодорожной автоматики, совершенствование технологического процесса их обслуживания и снижение эксплуатационных расходов за счет разработки методов и средств автоматизированного измерения параметров и характеристик нейтральных реле железнодорожной автоматики.
В соответствии с поставленной целью подлежат решению следующие задачи:
- разработка математической модели, описывающей электромеханические процессы, протекающие в электромагнитных реле железнодорожной автоматики с учетом особенностей их конструкции;
- проведение экспериментальных исследований электромеханических процессов в реле первого класса надежности для научного обоснования методов автоматизированного измерения параметров и характеристик нейтральных реле железнодорожной автоматики;
- разработка методов определения положения якоря и вычисления механических параметров нейтральных реле первого класса надежности без снятия кожуха;
- разработка метода автоматизированного определения контактного давления в электромагнитных реле типов НМШ и РЭЛ;
- разработка методов и алгоритмов автоматизированного измерения электрических и временных параметров реле;
- аппаратная и программная реализация методов автоматизированного измерения характеристик и параметров электромагнитных реле железнодорожной автоматики.
Похожие работы
... . С 1932 г. Строительство автоблокировки ведется только на отечественной аппаратуре. Во второй половине 30-х годов по разработкам Всесоюзного научно-исследовательского института железнодорожного транспорта (ЦНИИ МПС) была создана отечественная система автоматической локомотивной сигнализации (АЛС). Впервые эта система была внедрена на участке Москва-Серпухов. Одновременно с внедрением велись ...
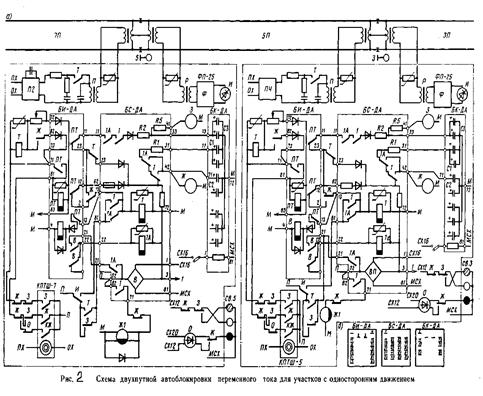
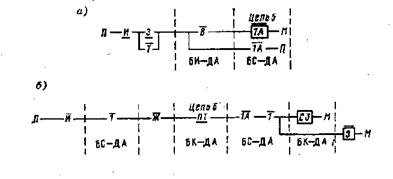
... отдельную двухпроводную цепь, в которую включают известительное реле. Информацию о состоянии переездной установки на станцию передают устройства диспетчерского контроля. Схема управления переездной сигнализацией для нечетного пути двухпутного перегона показана на рис. 5 В пределах блок-участка, на котором расположен переезд, образованы две рельсовые цепи: 5П с питающим концом НП на переезде и ...
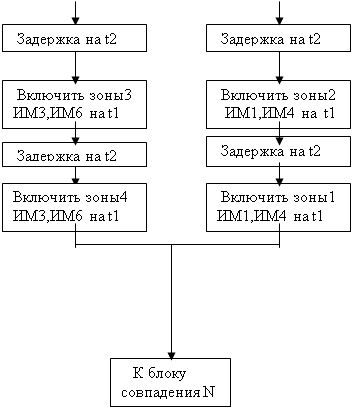
... информации хотя бы на двух датчиках из трех. Каждый датчик состоит из четырех зон, последовательность включения которых определяет направление движения подвижного состава. Стенд проверки устройства контроля свободности железнодорожного перегона должен: - формировать сигнал занятия рельсовой цепи РЦ для счетных пунктов СП1 и СП2; - формировать сигнал ИВ для сброса показаний счетно-решающего ...
... осуществляется по светофорам и автоматической локомотивной сигнализации, а в неправильном направлении - только по светофорам локомотивной сигнализации АЛС. В принципиальных схемах автоблокировки предусматриваются схемы увязки с автоматической переездной сигнализацией. Контроль исправного состояния устройств сигнальной установки осуществляется средствами частотного диспетчерского контроля. С ...
0 комментариев