Навигация
Уравнения Лагранжа второго рода
14404
знака
0
таблиц
3
изображения
5 Уравнения Лагранжа второго рода
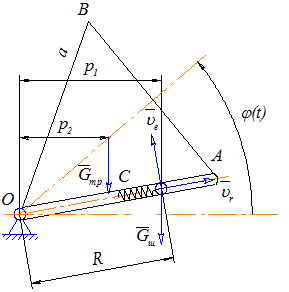
Предположим, что механическая система из n материальных точек имеет s степеней свободы. В случае голономных нестационарных связей радиус-вектор ![]() любой точки М
любой точки М![]() , этой системы является функцией обобщенных координат
, этой системы является функцией обобщенных координат ![]() и времени t:
и времени t:
![]()
![]() ,
,![]() ). (2)
). (2)
Обобщенные координаты системы ![]() являются функциями времени. Поэтому радиус-вектор
являются функциями времени. Поэтому радиус-вектор ![]() является сложной функцией времени и вектор скорости точки
является сложной функцией времени и вектор скорости точки ![]() , определяется по правилу дифференцирования сложной функции:
, определяется по правилу дифференцирования сложной функции:
 (3)
(3)
Из выражения (3) следует, что частная производная от ![]() по какой-либо обобщенной скорости
по какой-либо обобщенной скорости ![]() равна коэффициенту при
равна коэффициенту при![]() в правой части этого выражения, т.е. равна частной производной от
в правой части этого выражения, т.е. равна частной производной от ![]() по координате
по координате ![]() :
:
 (4)
(4)
Кинетическая энергия механической системы, как известно, определяется по формуле:
 (5)
(5)
Из выражения (3) следует, что вектор скорости точки ![]() в случае голономных нестационарных связей является функцией обобщенных координат, содержащихся в выражениях
в случае голономных нестационарных связей является функцией обобщенных координат, содержащихся в выражениях ![]() , обобщенных скоростей и времени. Поэтому кинетическая энергия механической системы является функцией тех же переменных:
, обобщенных скоростей и времени. Поэтому кинетическая энергия механической системы является функцией тех же переменных:
![]() (6)
(6)
Найдем частные производные от кинетической энергии по обобщенной координате ![]() и обобщенной скорости
и обобщенной скорости ![]() , дифференцируя выражение (5) как сложную функцию:
, дифференцируя выражение (5) как сложную функцию:
Преобразуем последнее выражение на основании равенства (4):
Продифференцируем это выражение по времени:
 (7)
(7)
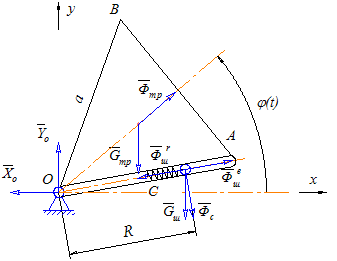
Рассмотрим две суммы, входящие в правую часть полученного равенства (7), учитывая, что для несвободной материальной точки ![]()
1. С помощью равенства (1), определяющего обобщенную силу, находим:

2. Для установления значения второй суммы рассмотрим выражение

Частная производная является функцией тех же переменных, от которых, согласно (2), зависит радиус-вектор точки ![]() . Дифференцируем
. Дифференцируем ![]() как сложную функцию времени:
как сложную функцию времени:
 (8)
(8)
Найдем частную производную ![]() , дифференцируя по
, дифференцируя по ![]() выражение (3):
выражение (3):
 (9)
(9)
Правые части выражений (8) и (9) отличаются только последовательностью дифференцирования, которая при непрерывных функциях не имеет значения; следовательно,
![]() .
.
Пользуясь этой зависимостью, преобразуем вторую сумму в правой части равенства (7):
 =
=
Подставляя найденные значения обеих сумм в равенство (7) и рассматриваем механическую систему со стационарными идеальными связями, для которых ![]() :
:

![]() +
+![]() ,
,
или

![]() =
=![]() (j = 1,2,…, s). (10)
(j = 1,2,…, s). (10)
Систему s дифференциальных уравнений (10) называют уравнениями Лагранжа второго рода. Эти уравнения представляют собой дифференциальные уравнения второго порядка относительно обобщенных координат системы ![]() .Интегрируя эти дифференциальные уравнения и определяя по начальным условиям постоянные интегрирования, получаем s уравнений движения механической системы в обобщенных координатах:
.Интегрируя эти дифференциальные уравнения и определяя по начальным условиям постоянные интегрирования, получаем s уравнений движения механической системы в обобщенных координатах:
![]() (j=1, 2,…, s).
(j=1, 2,…, s).
Похожие работы
... в шарнире можно найти по формуле: , где и определяются выражениями (4.5) и (4.7); график её зависимости от времени приведён в приложении к курсовой работе (рис. 4). 5. Исследование движения механической системы с двумя степенями свободы с помощью уравнений Лагранжа II рода 5.1 Составление уравнений движения системы методом Лагранжа Уравнения второго рода являются одним из наиболее ...
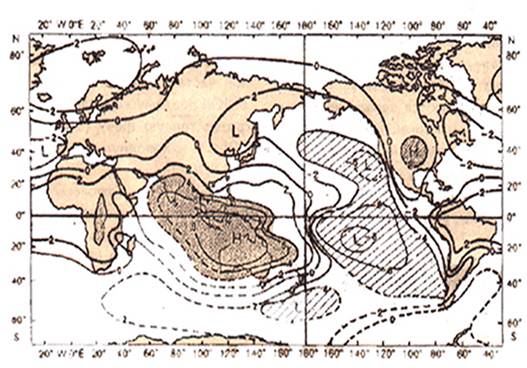
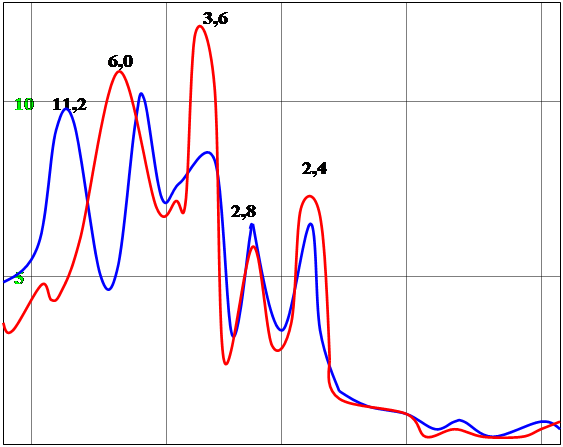
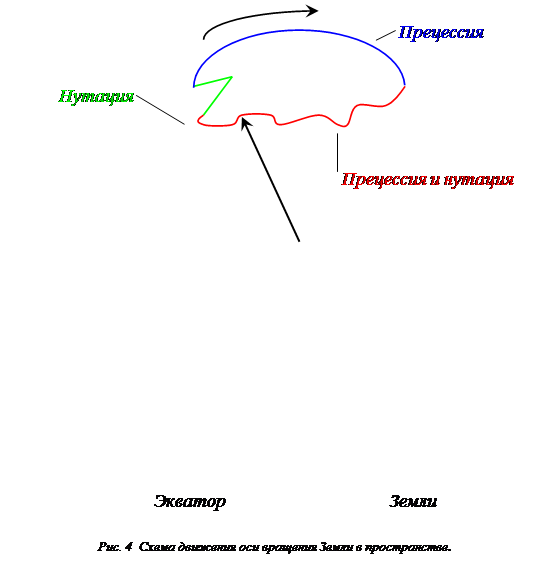
... более прозаично связаны с периодическими колебаниями физических систем и воздействием на них сторонних сил, имеющих также физическую природу. Итак, природные катаклизмы вызываются периодическими колебаниями системы атмосфера – океан – Земля под воздействием Солнца (прецессия), неравномерности прогрева атмосферы (воздействие воздушных масс на Землю), неравномерным прогревом океана (океанические ...
... к точности, хотя это уменьшение весьма не значительное. 4.Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в работе, использовалась программа “Модель портального манипулятора МРЛ-901П в момент ...
... производительность планировочных работ в целом, но требует применения запоминающих устройств и устройств индикации. Цель данной работы – повышение производительности автогрейдера, выполняющего планировочные работы. Поставленная цель достигается путем применения системы стабилизации отвала, включающей запоминающее устройство и устройство индикации, позволяющей в процессе производства планировочных ...
0 комментариев