Навигация
Исследование движения механической системы с двумя степенями свободы
17334
знака
10
таблиц
8
изображений
Министерство образования РФ
Самарский Государственный Аэрокосмический Университет имени академика С.П. Королева (Тольяттинский филиал)
Кафедра математики и механики
Курсовая работа по теоретической механике
по теме:
«Исследование движения механической системы с двумя степенями свободы»
Тольятти 2006 г.
Содержание
Введение
1. Исходные данные
2. Исследование относительного движения материальной точки
3. Применение общих теорем динамики к исследованию движения механической системы
3.1. Составление уравнения движения твердого тела с помощью теоремы об изменении кинетического момента
3.2. Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
4. Определение реакций в опорах вращающегося тела
5. Исследование движения механической системы с двумя степенями свободы с помощью уравнений Лагранжа II рода
5.1. Составление уравнений движения системы методом Лагранжа
5.2. Получение дифференциального уравнение относительного движения материальной точки
5.3. Определение закона изменения внешнего момента, обеспечивающего постоянство угловой скорости
6. Определение положений равновесия механической системы и исследование их устойчивости
Заключение
Список использованных источников
Введение
Изучение теоретической механики как одной из фундаментальных физико-математических дисциплин играет важную роль в подготовке специалистов по механико-математическим и инженерным механическим направлениям. Оно позволяет будущим специалистам не только получить глубокие знания о природе, но и вырабатывает у них необходимые навыки для решения сложных научных и технических задач, для которых требуется построение математических моделей разнообразных механических систем, развивает способности к научным обобщениям и выводам.
Для закрепления навыков самостоятельного решения задач механики во втором семестре изучения теоретической механики студенты СГАУ выполняют курсовую работу, в которой необходимо провести комплексный анализ движения системы с двумя степенями свободы, пользуясь различными методами теоретической механики.
Теоретическая механика, как часть естествознания, использующая математические методы, имеет дело не с самими материальными объектами, а их математическими моделями. Такими моделями являются материальные точки, системы материальных точек, твердые тела и деформируемая сплошная среда. В курсовой работе рассматриваются простейшие системы, которые состоят из твердых тел, совершающих простейшие движения, и перемещающейся по телу материальной точки.
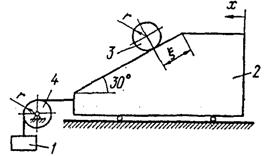
1. Исходные данные
Сплошной равносторонний треугольник ![]() со стороной
со стороной ![]() , имеющий массу
, имеющий массу ![]() вращается вокруг шарнира
вращается вокруг шарнира ![]() . В точке
. В точке ![]() – середине канала
– середине канала ![]() , на пружине жёсткостью
, на пружине жёсткостью ![]() закреплён шарик массой
закреплён шарик массой ![]() . При вращении треугольника шарик может совершать колебательные движения вдоль канала
. При вращении треугольника шарик может совершать колебательные движения вдоль канала ![]() .
.
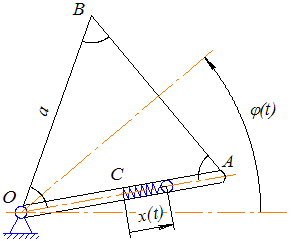
Рисунок 1.1. Схема механической системы
2. Исследование относительного движения материальной точки
Движение материальной точки в подвижной системе отсчета описывается дифференциальным уравнением относительного движения:
![]() (1.1)
(1.1)
Здесь ![]() – относительное ускорение материальной точки;
– относительное ускорение материальной точки; ![]() – сумма всех внешних и внутренних сил;
– сумма всех внешних и внутренних сил; ![]() и
и ![]() – переносная и кориолисова силы инерции соответственно.
– переносная и кориолисова силы инерции соответственно.
Свяжем подвижную систему отсчета ![]() с движущимся вдоль канала
с движущимся вдоль канала ![]() шариком. Ось
шариком. Ось ![]() проведём вдоль канала, причём возрастание координаты
проведём вдоль канала, причём возрастание координаты ![]() сонаправленно с движением шарика относительно трубки; а ось
сонаправленно с движением шарика относительно трубки; а ось ![]() направим перпендикулярно ей. Вращение треугольника
направим перпендикулярно ей. Вращение треугольника ![]() вместе с системой координат
вместе с системой координат ![]() вокруг шарнира является переносным движением для шарика. Относительным движением является его перемещение вдоль канала
вокруг шарнира является переносным движением для шарика. Относительным движением является его перемещение вдоль канала ![]() .
.
Дифференциальное уравнение движения (2.1) для данной системы примет вид:
![]() (2.2)
(2.2)
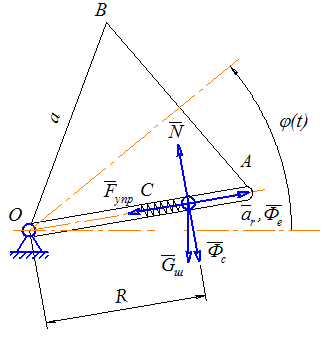
Рисунок 2.1. Исследование относительного движения материальной точки
Абсолютные значения сил:
![]() ;
;
![]() , где
, где ![]() ;
;
![]() – при постоянной угловой скорости вращения
– при постоянной угловой скорости вращения ![]() , тогда
, тогда ![]() , где
, где ![]() – радиус вращения шарика вокруг шарнира
– радиус вращения шарика вокруг шарнира ![]() ;
;
![]() , т. к. угол между относительной и угловой скоростями прямой, отсюда
, т. к. угол между относительной и угловой скоростями прямой, отсюда ![]() , а направление определяется по правилу Жуковского.
, а направление определяется по правилу Жуковского.
Возьмём проекцию дифференциального уравнения относительного движения (2.2) на координатную ось ![]() подвижной системы координат:
подвижной системы координат:
![]() (2.3)
(2.3)
Радиус переносного вращения шарика:
![]() (2.4)
(2.4)
С учётом значений сил и формулы (2.4), уравнение (2.3) принимает вид:
![]()
Отсюда получаем значение реакции связи ![]() :
:
![]() (2.5)
(2.5)
В приложении к курсовой работе изображён график зависимости ![]() (рис. 2).
(рис. 2).
Теперь спроецируем дифференциальное уравнение (2.2) на координатную ось ![]() :
:
![]() (2.6)
(2.6)
При подстановке известных значений получим:
![]() (2.7)
(2.7)
Приведём (2.7) к следующему виду:
![]() (2.8)
(2.8)
Здесь ![]() – это собственная частота. Для нахождения зависимости
– это собственная частота. Для нахождения зависимости ![]() решим данное уравнение.
решим данное уравнение.
![]() – решение искомого дифференциального уравнения будет складываться из общего решения соответствующего однородного уравнения
– решение искомого дифференциального уравнения будет складываться из общего решения соответствующего однородного уравнения ![]() и любого частного решения
и любого частного решения ![]() .
.
Общее решение имеете вид: ![]() (2.9).
(2.9).
Найдём частное решение уравнения (2.8), оно будет иметь вид: ![]() . Первая и вторая производные:
. Первая и вторая производные: ![]() ,
, ![]() .
.
Подставляя частное решение и его производные в (2.8), получим:
![]()
Находим значения постоянных коэффициентов:  ,
, ![]() .
.
![]() (2.10)
(2.10)
Тогда, исходя из (2.9) и (2.10), решение исходного дифференциального уравнения:
![]()
Для определения констант интегрирования, используем начальные условия:
![]() ,
, ![]() или
или ![]() ; откуда
; откуда ![]() .
.
![]()
![]() ,
, ![]() или
или ![]() , откуда
, откуда ![]() .
.
Подставив значения ![]() и
и ![]() , и сгруппировав слагаемые, получим дифференциальные уравнения относительного движения шарика и его скорости:
, и сгруппировав слагаемые, получим дифференциальные уравнения относительного движения шарика и его скорости:
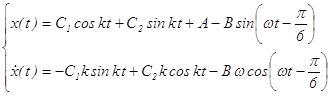 (2.11)
(2.11)
Здесь ![]() , ,
, , ![]() ,
, ![]() ,
, ![]() .
.
В приложении к курсовой работе изображён график зависимости ![]() (рис. 1).
(рис. 1).
Похожие работы
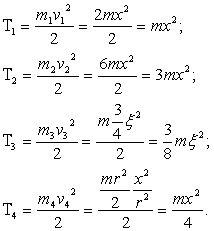
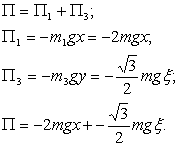
... производные в уравнения Лагранжа (11): или (j=1,2,…, s). (12) Уравнения (12) называются уравнениями Лагранжа второго рода для консервативной системы. 7 Применение уравнений Лагранжа II рода к исследованию движения механической системы Массы тел механической системы m= 2m; m= 6m; m=m. Начальные условия:,,,. Найти уравнения движения системы в обобщенных координатах ,. Для ...

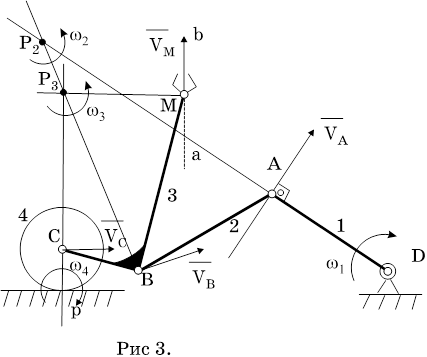
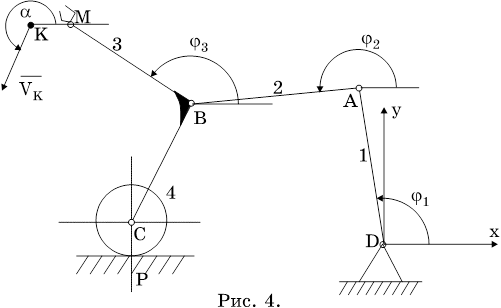

(3) w3z=w3z (j1, j2, j3, VM); w4z=w4z (j1, j2, j3, VM) или Vc=Vc (j1, j2, j3, VM) Из уравнений (3) определяют угловые скорости звеньев для фиксированного момента времени при заданных в этот момент значениях j1, j2, j3. Изменение j1, j2, j3, а следовательно и w1z, w2z, w3z во времени определится,если дополнить систему (3) уравнениями: ...
... и выдвигает новое определение: все системы, допускающие несводимое вероятностное описание, по определению считаются хаотическими [1, с.9]. 3. БРЮССЕЛЬСКАЯ ИНТЕРПРЕТАЦИЯ КВАНТОВОЙ МЕХАНИКИ Э.Шрёдингер 3.1 Альтернативные интерпретации квантовой механики Вероятно, квантовая механика – одна из немногих, если не единственная работающая физическая теория, по поводу интерпретации которой ...
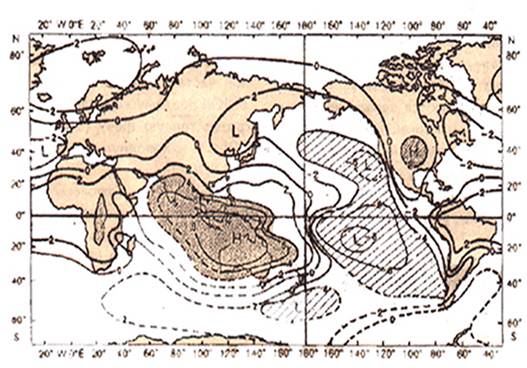
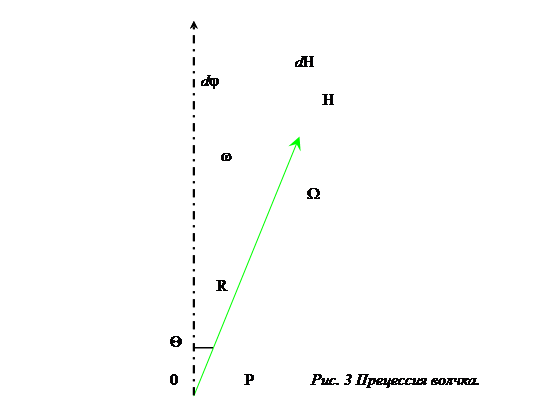
... более прозаично связаны с периодическими колебаниями физических систем и воздействием на них сторонних сил, имеющих также физическую природу. Итак, природные катаклизмы вызываются периодическими колебаниями системы атмосфера – океан – Земля под воздействием Солнца (прецессия), неравномерности прогрева атмосферы (воздействие воздушных масс на Землю), неравномерным прогревом океана (океанические ...
0 комментариев