Навигация
Математическая модель в пространстве состояний линейного стационарного объекта управления
99279
знаков
0
таблиц
156
изображений
СОДЕРЖАНИЕ
1. Анализ объекта управления
1.1 Анализ линейного стационарного объекта управления, заданного передаточной функцией
1.2 Получение математической модели в пространстве состояний линейного стационарного объекта управления, заданного передаточной функцией
1.2.1 Матрица Фробениуса
1.2.2 Метод параллельной декомпозиции
2. Решение задачи быстродействия симплекс-методом
3. Оптимальная l – проблема моментов
3.1 Оптимальная l – проблема моментов в пространстве «вход-выход»
3.2 Оптимальная l – проблема моментов в пространстве состояний
4. Нахождение оптимального управления с использованием грамиана управляемости (критерий – минимизация энергии)
5. Аналитическое конструирование оптимальных регуляторов (акор)
5.1 Стабилизации объекта управления на полубесконечном интервале времени
5.1.1 Решение алгебраического уравнения Риккати методом диагонализации
5.1.2 Решение алгебраического уравнения Риккати интегрированием в обратном времени до установившегося состояния
5.2 Стабилизации объекта управления на конечном интервале времени
5.3 Задача акор – стабилизации для компенсации известного возмущающего воздействия.
5.4 Задача акор для отслеживания известного задающего воздействия. i подход
5.5 Задача акор для отслеживания известного задающего воздействия. ii подход (линейный сервомеханизм)
5.6 Задача акор – слежения со скользящими интервалами.
6. Синтез наблюдателя полного порядка
Литература
Приложение
PlotTimeFrHaract.m
ProstranstvoSostoyanii.m
SimplexMetod2.m
Optimal_L_problem_moments.m
Gramian_Uprav.m
AKOR_stabilizaciya_na_polybeskon_interval.m
AKOR_stabilizaciya_na_konech_interval.m
Sravnenie_stabilizacii.m
AKOR_stabilizaciya_pri_vozmusheniyah.m
AKOR_slegenie_na_konech_interval_I_podxod.m
AKOR_slegenie_na_konech_interval_II_podxod.m
AKOR_slegenie_so_skolz_intervalami_Modern.m
Sintez_nablyud_polnogo_poryadka.m
Solve_Riccati_Method_Diag.m
Solve_Riccati_Method_Revers_Integr.m
Vozmyshyayushee_Vozdeistvie_Discrete_Revers.m
Zadayushee_Vozdeistvie_Discrete_Revers_Modern.m
1. Анализ объекта управления
1.1 Анализ линейного стационарного объекта управления, заданного передаточной функциейПередаточная функция данного объекта имеет вид:
 ,
,
где:
![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
или
 .
.
Нули передаточной функции:
![]()
Полюса передаточной функции (полученные стандартными функциями среды Matlab 7.4):

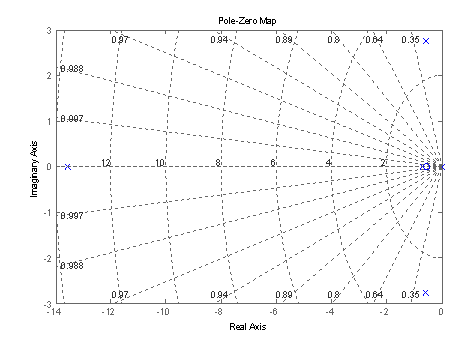
Рис.1. График расположения нулей и полюсов передаточной функции объекта на комплексной плоскости.
Найдем временные характеристики объекта управления.
К временным характеристикам относятся ![]() и
и ![]() .
.
![]() – переходная характеристика;
– переходная характеристика;
![]() – импульсная переходная функция;
– импульсная переходная функция;
Для нахождения ![]() и
и ![]() воспользуемся пакетом Matlab 7.4.
воспользуемся пакетом Matlab 7.4.
 ,
,
Аналитическое выражение для ![]() :
:

В этом случае ![]() имеет вид
имеет вид
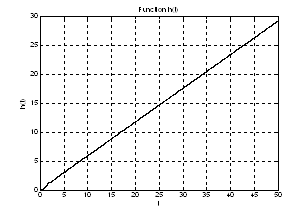
Рис.2. График переходной характеристики ![]() .
.
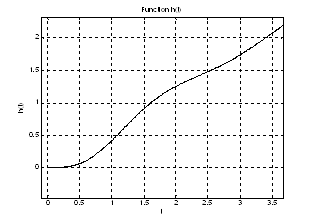
Рис.3. График переходной характеристики ![]() на интервале
на интервале ![]() (увеличенное).
(увеличенное).
 ,
,
Аналитическое выражение для ![]() :
:
 .
.
В этом случае ![]() имеет вид
имеет вид
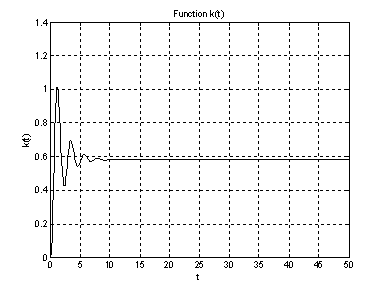
Рис.4. График импульсной переходной характеристики ![]() .
.
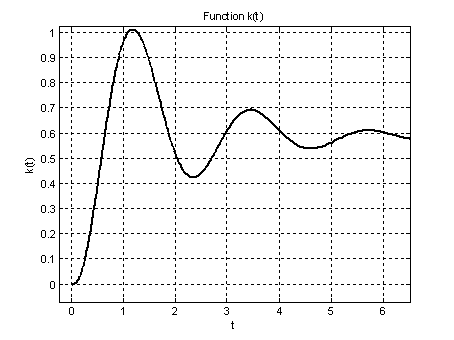
Рис.5. График импульсной переходной характеристики ![]() на интервале
на интервале ![]() (увеличенное).
(увеличенное).
Найдем частотные характеристики объекта управления.
К частотным характеристикам относятся:
амплитудно – частотная характеристика (АЧХ),
фазо – частотная характеристика (ФЧХ),
амплитудно – фазовая частотная характеристика (АФЧХ),
Аналитическое выражение для АЧХ:
 .
.
В этом случае АЧХ имеет вид
Рис.6. График АЧХ
Рис.7. График АЧХ на интервале ![]() (увеличенное). Аналитическое выражение для ФЧХ:
(увеличенное). Аналитическое выражение для ФЧХ:

В этом случае ФЧХ имеет вид
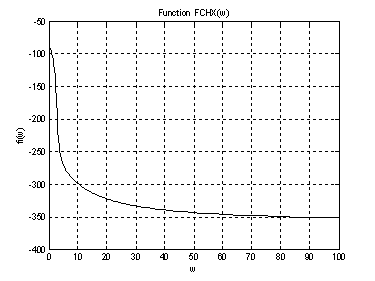
Рис.8. График ФЧХ .
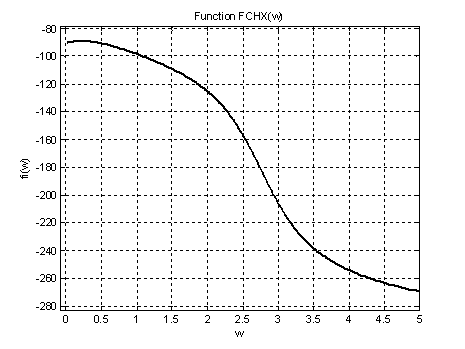
Рис.9. График ФЧХ на интервале ![]() (увеличенное).
(увеличенное).

Рис.10. График АФЧХ.

Рис.11. График АФЧХ (увеличенное).
Аналитическое выражение для ЛАЧХ:
 .
.
В этом случае ЛАЧХ имеет вид

Рис.12. График ЛАЧХ.
Аналитическое выражение для ЛФЧХ:

В этом случае ЛФЧХ имеет вид

Рис.13. График ЛФЧХ.
1.2 Получение математической модели в пространстве состояний линейного стационарного объекта управления, заданного передаточной функцией
Передаточная функция данного объекта имеет вид:
![]() ,
,
где:
![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
или
Описание системы в пространстве состояний имеет следующий вид:
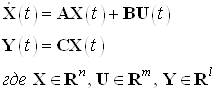
Переходя в область изображений описание системы в пространстве состояний будет иметь следующий вид:

Получим выражения, которые определяют вектор состояний и выход заданного объекта в общем виде:
 .
.
 .
.
Тогда получим:
![]() (1)
(1)
![]() (2)
(2)
Числитель передаточной функции имеет вид: ![]() .
.
Знаменатель передаточной функции:
![]() .
.
Тогда согласно равенству (1) и (2) имеем
![]() ,
,
![]() .
.
Перейдем из области изображений в область оригиналов
![]() ,
,
![]()
и затем перейдем к нормальной форме Коши


![]() .
.
Запишем матрицы состояний
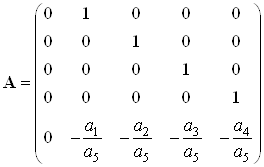 ,
, 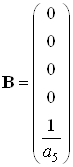 ,
, ![]()
Численное значение матриц состояний:
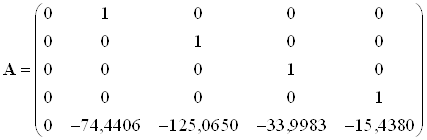 ,
,  ,
,
![]()
1.2.2 Метод параллельной декомпозиции
Запишем передаточную функцию объекта в другом виде, а именно:

или
 .
.
Согласно формуле ![]() получим
получим

Рассмотрим каждое из слагаемых в отдельности согласно принципу параллельной декомпозиции.
a. 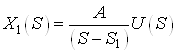 ,
,
![]() .
.
b.  ,
,
![]() .
.
c.  ,
,
![]() ,
,
![]() ,
,

![]()


![]()
d. 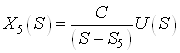 ,
,
![]()
Получим выход системы:

![]()
Запишем матрицы состояний
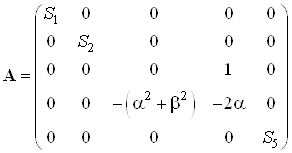 ,
,  ,
, ![]()
Вычисление коэффициентов разложения дробной рациональной функции ![]() на сумму элементарных дробей и проверка правильности получения матриц состояния сделано с помощью пакета Matlab 7.4 (скрипт ProstranstvoSostoyanii.m)
на сумму элементарных дробей и проверка правильности получения матриц состояния сделано с помощью пакета Matlab 7.4 (скрипт ProstranstvoSostoyanii.m)
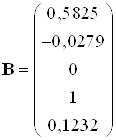
Получены следующие результаты:Матрица СЛАУ:
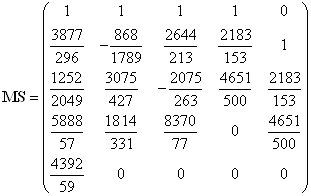 ,
,  ,
,
![]() ,
,

Численное значение матриц состояний:
 ,
,  ,
,
![]() .
.
Похожие работы
... степеней свободы. Величину критерия Фишера (F-критерий) определяют по формуле: (должно быть). Значимость коэффициентов bi уравнения регрессии определяют по t-критерию (критерии Стьюдента): , . Идентификация объектов управления методом корреляционного анализа Метод корреляционного анализа используется для идентификации объектов управления в том случае, если входные и выходные ...
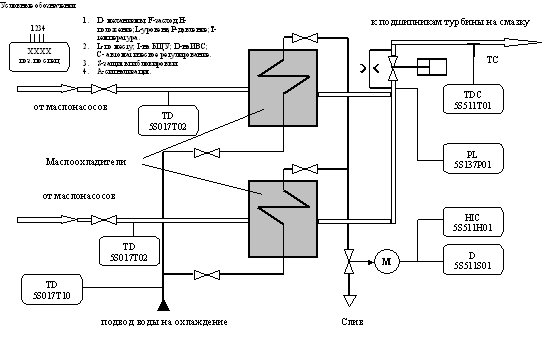
... : - по маслу 20кПа - по воде 20,1кПа Максимальное рабочее давление: - масла 0,5Мпа - воды 0,5МПа Функциональная схема системы регулирования температуры смазочного масла приведена на рис. 9. Она содержит два маслоохладителя параллельно ...

... проектирования. Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС. Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью ...
... damn(t)/dt =[daij(t)/dt] 1.3 ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА. Физический объект - физическое устройство, характеризуемое некоторым числом свойств, соответствующих целям его использования. В теории систем существенным является не физическое, а математическое описание свойств объекта и соотношений между ними. В теории систем объектом А является абстрактный объект, связанный с множеством ...
0 комментариев