Получение квадратичной модели
Преобразование модели в форме Ассео
Условие правомерности децентрализации
Исследование процессов в системе и анализ количественных свойств системы
Построение графиков кривой разгона дискретной системы
Построение графиков кривой разгона нелинейной системы
Пассивная идентификация
Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
Конструирование надежного регулятора
Вычислить критерий оптимальности в системе
Навигация
Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
Конструирование многомерных регуляторов смесительного бака
17832
знака
10
таблиц
44
изображения
2. Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
2.1 Конструирование П. - регулятора, оптимизирующего систему по интегральному квадратичному критерию
Регулятор состояния, который оптимизирует систему по критерию:
![]()
![]()
Определяется по соотношениям:
P=LR1(A,B,Q,R); ![]()
![]()
![]() При этом Q=R=I
При этом Q=R=I
![]()
Т.к. матрица С. является инвертированной, для образования регулятора выхода нет необходимости конструировать наблюдатель состояния – недосягаемое состояние просто вычисляется по формуле ![]() .
.
![]()
Следовательно, регулятор выхода имеет вид ![]()
![]()
2.2 Конструирование компенсаторов заданий и измеряемых возмущений
Обозначивши через z заданное значение выхода y и припуская, что ![]() , получим
, получим

![]()
Приняв во внимание, что А=В

Если при компенсации возмущений и заданий учесть «стоимость» управления, записавши критерий в виде
![]() ,
,
то компенсаторы (оптимальные) определяются зависимостями
![]()
![]()

Значение выхода при действии возмущения f в системе без компенсаторов при z=0
![]()
а также с оптимальным компенсатором.
![]()
2.3 Конструирование регулятора с компенсатором взаимосвязей
![]()
![]()
Проверим, или регулятор действительно расцепляет систему, т.е. матрица передаточных функций является диагональной
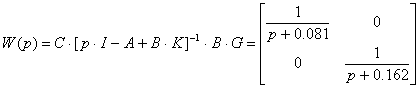
Используя V как новый вход можно далее записать
![]()
![]()
Регулятор выхода можно записать в виде
![]()
2.4 Конструирование апериодического регулятора
Апериодический регулятор для дискретной системы может быть получен: из условия ![]() . Запишем
. Запишем ![]()
![]()
![]()
2.5 Конструирование децентрализованного регулятора
Используя форму Ассео, запишем:
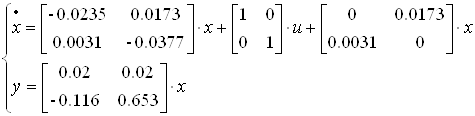
![]()

![]()
Следовательно, получим ![]()
![]()
Для определения критерия

Похожие работы
... выставляться с понижающим коэффициентом 0,8. 7. Студент должен быть вежливым, терпимым, открытым, доброжелательным к преподавателям и студентам. Тема 1. Введение. Структура и содержание дисциплины «Основы патентоведения и рационализации» Цель: знакомство с задачами изучаемой дисциплины, с основными понятиями и определениями. План: 1.1 Изобретательство – основа развития ...
0 комментариев