Навигация
3. ПИ-регулятор
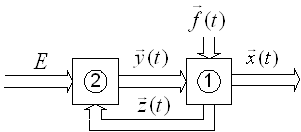
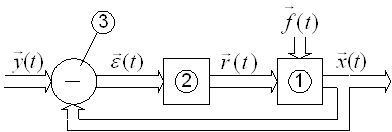
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ky—Wo.c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
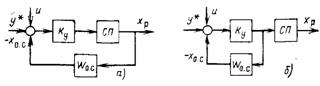
Рис. 4. Структурные схемы ПИ-регуляторов:
а — сервопривод охвачен ООС; б — сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
![]()
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора
![]()

Если принять Тд=Ти и Kр=1/Kд, получим
![]()
 т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
![]()
![]() и
и
В промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
Wp(p) = WКУУ(p)Wс.п(p), (3.3), где WКУУ(p) = 1 ⁄ Wо.с (р).
При использовании сервопривода с передаточной функцией интегрального звена Wс.п(p) = 1⁄ TР передаточная функция регулятора имеет вид
![]()
![]()
При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/Wо.с(р) = WКУУ(р) = Kр (1+TР) (3.5)
что обеспечивает обратная связь с оператором
Wо.с(р) = Kо.с/(1+TР) = д/(1+TР) (3.6)
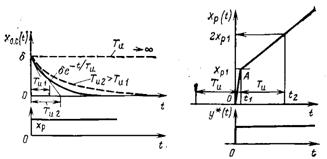
Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
Последнее уравнение служит оператором инерционного звена первого порядка. При охвате Ку такой обратной связью оператор регулятора в целом имеет вид
Wр(р) = Kр(1+1/TиР)
Параметрами настройки ПИ-регулятора служат Kр и Ти.
Если сервопривод имеет характеристику пропорционального звена и не охватывается обратной связью (рис. 4, б), то для того, чтобы выполнялось условие (3.2), Wо.c(p) должно быть реальным дифференцирующим звеном.
Постоянная времени ПИ-регулятора Ти численно равна подкасательной Тд к переходной кривой реального дифференцирующего звена (рис. 5).
Промышленные регуляторы имеют специальные приспособления— органы настройки для изменения Kр(д) и Ти в достаточно широких, но ограниченных пределах. Так как подача на вход регулятора ступенчатого сигнала не составляет труда, фактически установленные значения Кр и Tи можно легко определить из его экспериментальной переходной кривой (рис. 6). Наклонный участок OA на кривой объясняется наличием у промышленного ПИ-регулятора сервопривода с конечной (ограниченной) скоростью перемещения выходного вала редуктора. Из этого графика следует, что
Kр = xр1/y* (3.7)
а Ти численно равно времени, необходимому для перемещения выходного вала сервопривода из положения xр1 до его удвоенного значения 2хр1. Отсюда второе название Tи — время удвоения выходного сигнала ПИ-регулятора xр при подаче на его вход ступенчатого сигнала у*.
Из уравнения динамики идеального ПИ-регулятора следует, что Кр/Ти определяет степень ввода интегральной составляющей в ПИ-закон регулирования
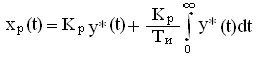
Действительно, при безграничном увеличении Ти второй член в  последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
последнем уравнении стремится к нулю и регулятор из пропорционально-интегрального переходит в П-регулятор. При этом экспонента (вида де-t/Tи) на выходе реального дифференцирующего звена, используемого в качестве устройства обратной связи, вырождается в ступенчатый сигнал д (рис. 5).
4. ПИД-регулятор
Закон регулирования
Wр(р) = Kр+Kр/TиР+KдTдР (4.1)
в реальных регуляторах формируется путем последовательной (рис. 7, а) или параллельной (рис. 7, б) коррекций ПИ-регулятора с помощью реального дифференцирующего (РД) звена. В обоих случаях ПИД-закон воспроизводится лишь приближенно.
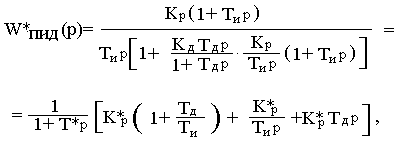
При последовательной коррекции
![]()
![]()
Где
![]()
При параллельной коррекции
![]()
Где


Рис. 7. Последовательная (а) и параллельная (б) коррекция ПИ-регулятора с помощью дифференцирующего звена

Рис. 8. Переходные характеристики ПИД-регуляторов
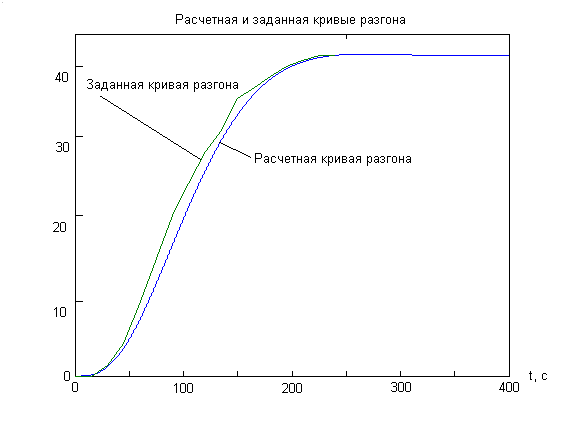
ПИД-регулятор имеет четыре параметра настройки: Kр, Tи, Tд и Kд, которые могут быть получены из экспериментальных кривых разгона ПИ-регулятора и РД-звена, снятых по отдельности. Комплексные параметры настройки реального ПИД-регулятора K*р и T* можно определить по формулам (4.2) (4.3).
На рис. 8. приведена кривая разгона реального ПИД-регулятора с аналоговым выходом (сплошная линия). В отличие от идеального (прерывистая линия) она имеет ограниченный и плавно затухающий «всплеск» x*р, связанный с дифференцированием ступенчатого сигнала с помощью РД-звена.
Заключение
Автоматические регуляторы, помимо высокой надежности, должны обладать высокой чувствительностью к изменениям входного сигнала, необходимой для точного поддержания регулируемых величин вблизи заданного значения. Для этого в составе регулятора предусматривается специальное измерительное устройство. Кроме того, автоматический регулятор должен развивать на выходе усилие, необходимое для перемещения регулирующих органов (клапанов, задвижек, шиберов), т. е. содержать в своей структуре достаточно мощный исполнительный механизм (сервопривод).
Для реализации выбранного закона регулирования и изменения параметров настройки регулятора в необходимых пределах в его состав должны входить устройства формирования закона регулирования и изменения (коррекции) параметров настройки. Необходимо также иметь возможность изменения в широких пределах заданного значения регулируемой величины, с которым сравнивается ее текущее значение. Это требование предусматривает наличие задатчика ручного или автоматического управления (ЗУ) в составе регулятора. Выполнение перечисленных требований возможно лишь при использовании автоматических регуляторов непрямого действия.
Список литературы
Плетнев Г.П. Автоматическое управление и защита теплоэнергетических установок электростанций: Учебник для техникумов. – 3-е изд., перераб. – М.: Энергоатомиздат, 1986.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд-во «Наука», 1966.
Михайлов В.С. Теория управления. – К.: высш. шк. Головное изд-во,1988.
Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., перераб. И доп. – К.: высш. шк. Головное изд-во, 1989.
Похожие работы

... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...


... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...

... на основе правил Госгортехнадзора с учетом местных условий и особенностей оборудования. Котел должен быть оборудован необходимым количеством контрольно-измерительных приборов, автоматической системой регулирования важнейших параметров котла, защитными устройствами, блокировкой и сигнализацией. Режимы работы котла должны соответствовать режимной карте, в которой указываются рекомендуемые ...
0 комментариев